
上肢及头部康复训练机器人.pdf

Jo****31

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

上肢及头部康复训练机器人.pdf
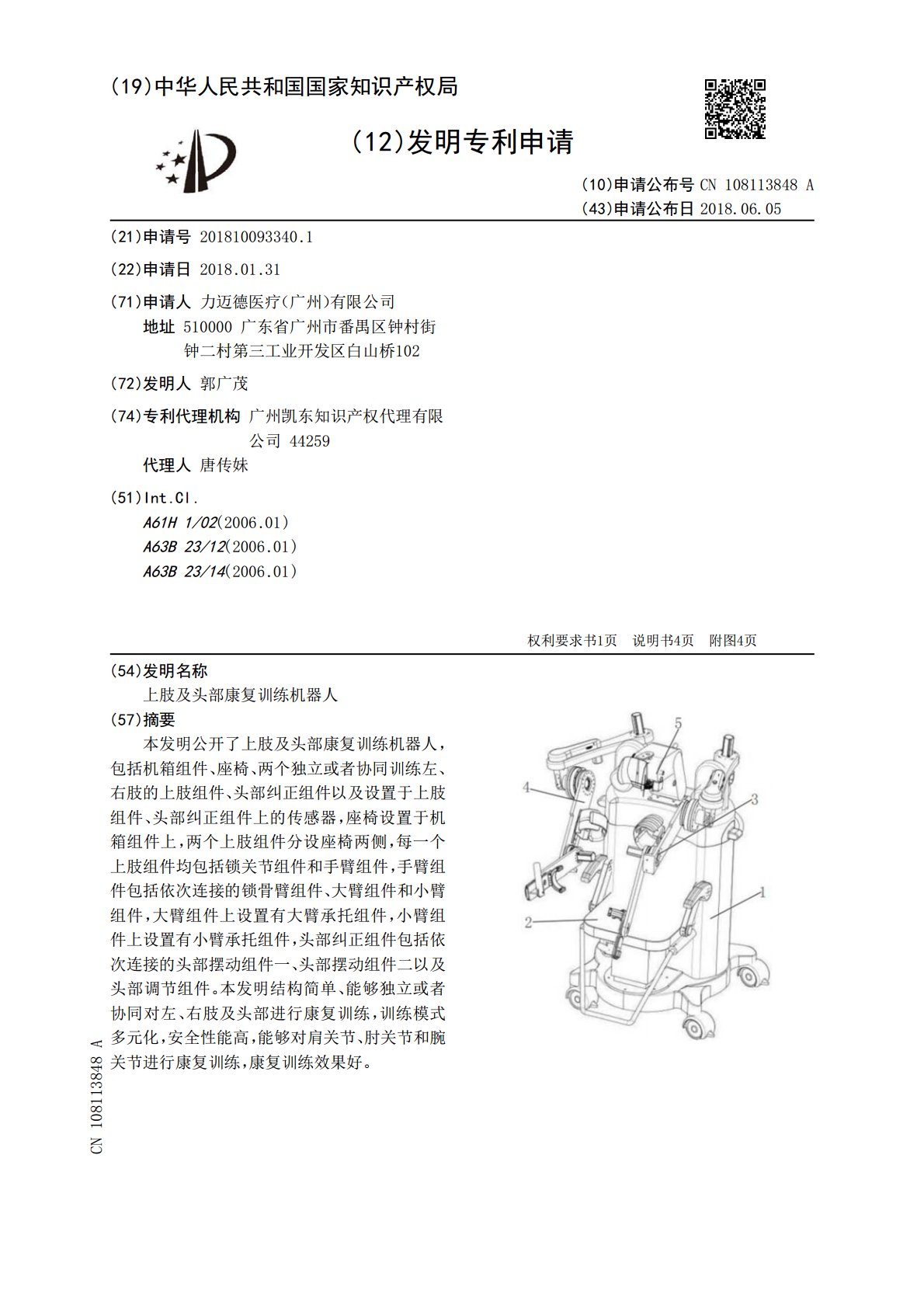
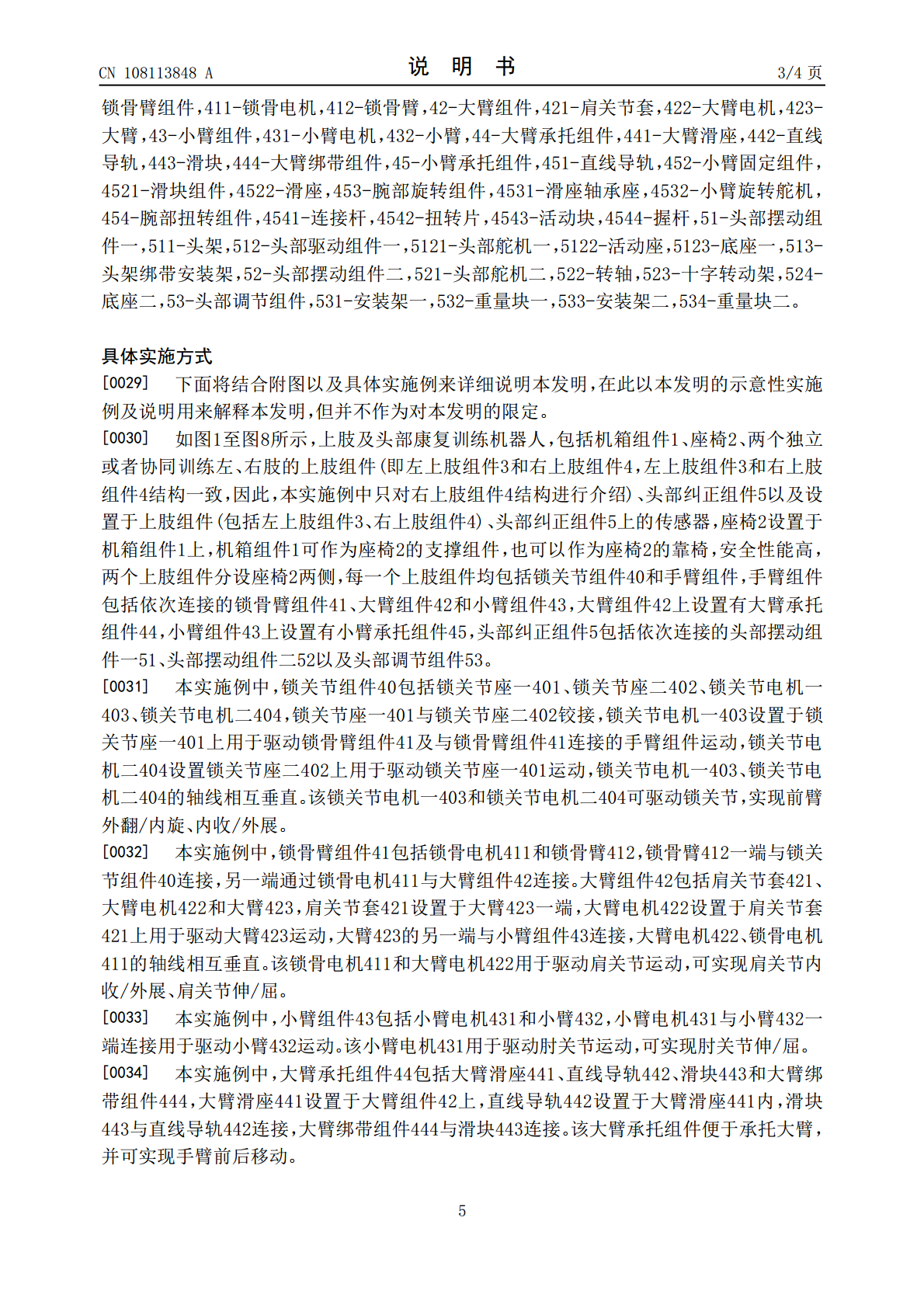
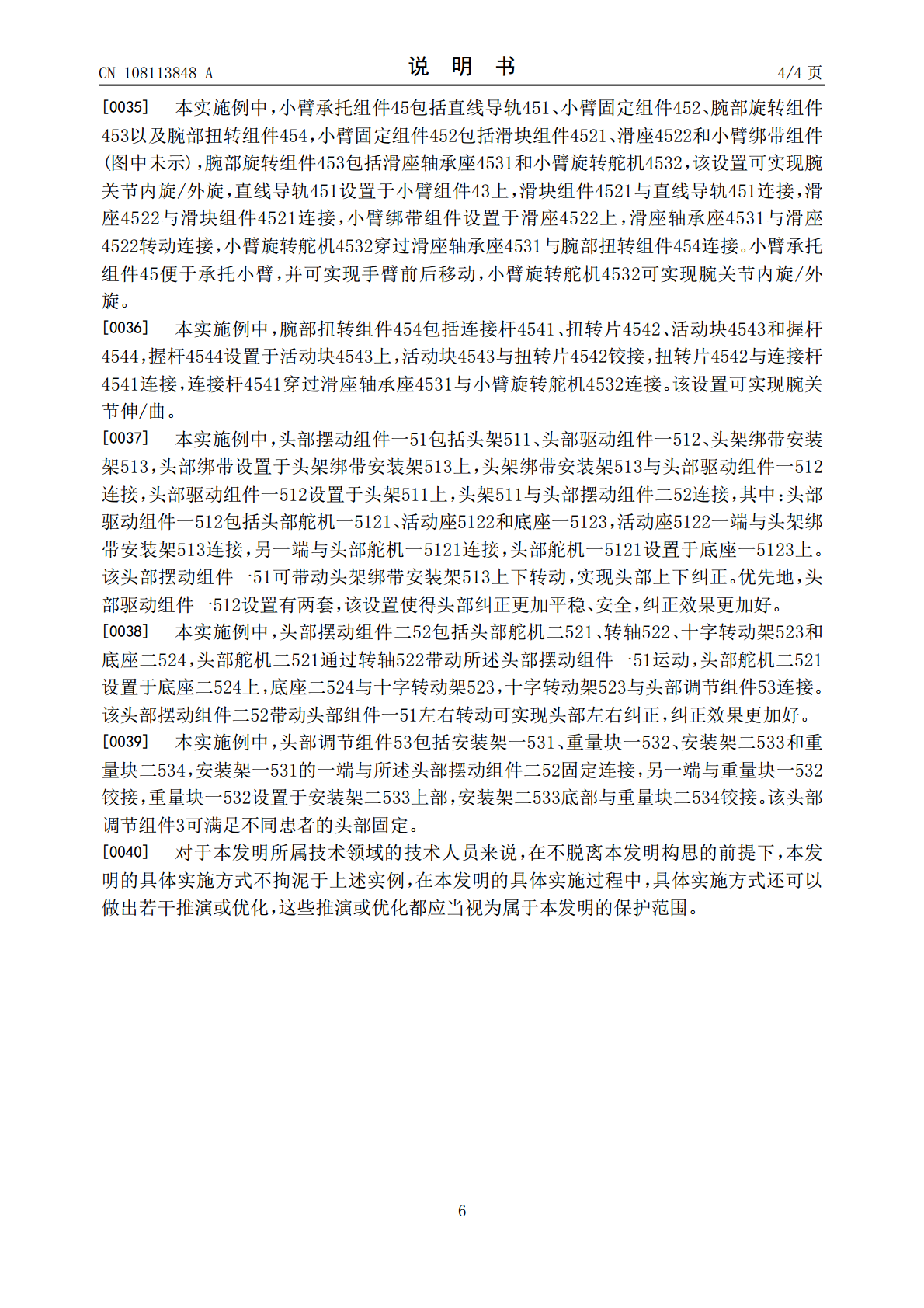
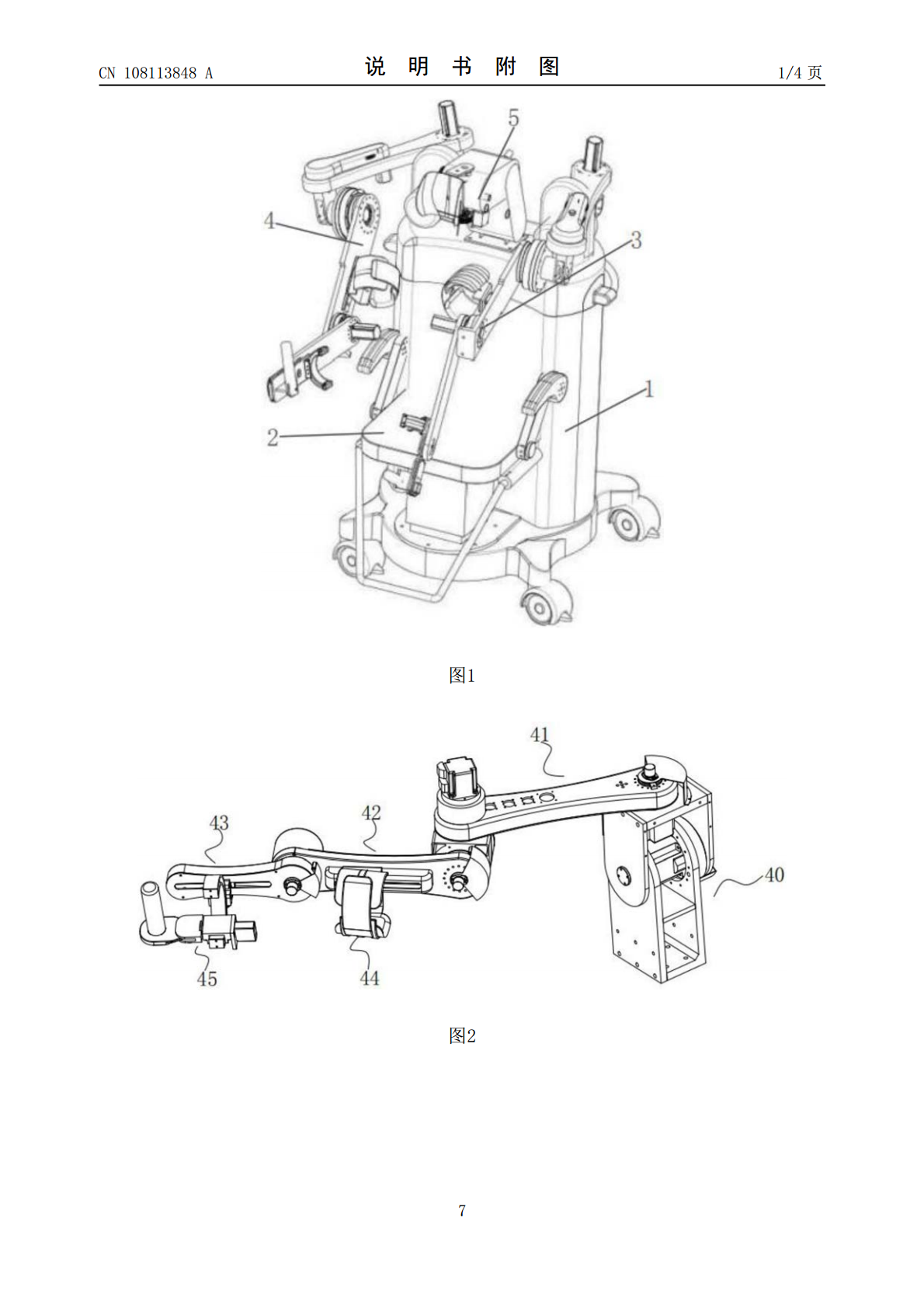
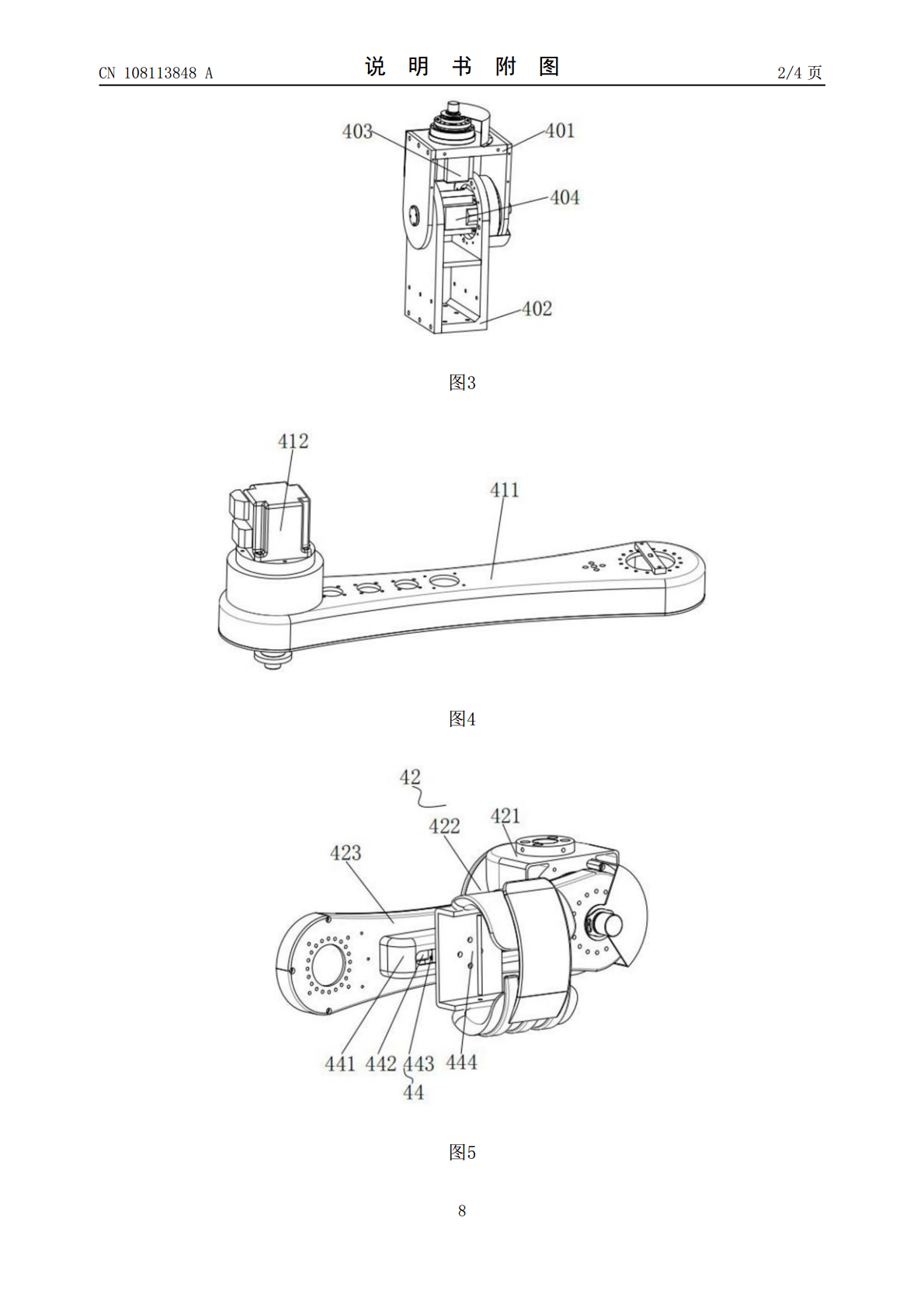
本发明公开了上肢及头部康复训练机器人,包括机箱组件、座椅、两个独立或者协同训练左、右肢的上肢组件、头部纠正组件以及设置于上肢组件、头部纠正组件上的传感器,座椅设置于机箱组件上,两个上肢组件分设座椅两侧,每一个上肢组件均包括锁关节组件和手臂组件,手臂组件包括依次连接的锁骨臂组件、大臂组件和小臂组件,大臂组件上设置有大臂承托组件,小臂组件上设置有小臂承托组件,头部纠正组件包括依次连接的头部摆动组件一、头部摆动组件二以及头部调节组件。本发明结构简单、能够独立或者协同对左、右肢及头部进行康复训练,训练模式多元化,

上肢康复训练机器人A2-0727.ppt
上肢康复机器人多游戏模式
一种上肢康复训练机器人.pdf
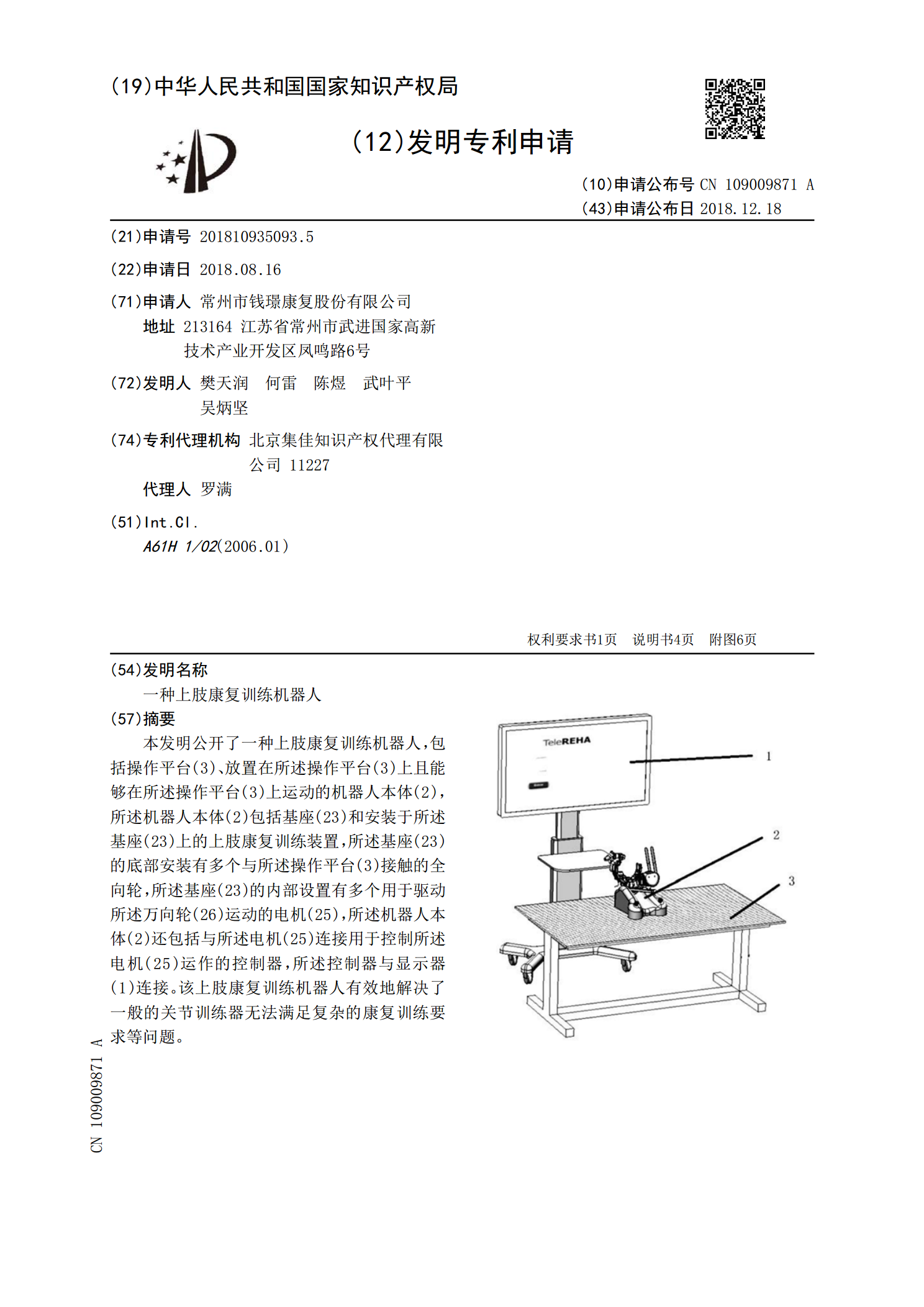
本发明公开了一种上肢康复训练机器人,包括操作平台(3)、放置在所述操作平台(3)上且能够在所述操作平台(3)上运动的机器人本体(2),所述机器人本体(2)包括基座(23)和安装于所述基座(23)上的上肢康复训练装置,所述基座(23)的底部安装有多个与所述操作平台(3)接触的全向轮,所述基座(23)的内部设置有多个用于驱动所述万向轮(26)运动的电机(25),所述机器人本体(2)还包括与所述电机(25)连接用于控制所述电机(25)运作的控制器,所述控制器与显示器(1)连接。该上肢康复训练机器人有效地解决了一
一种上肢康复训练机器人.pdf
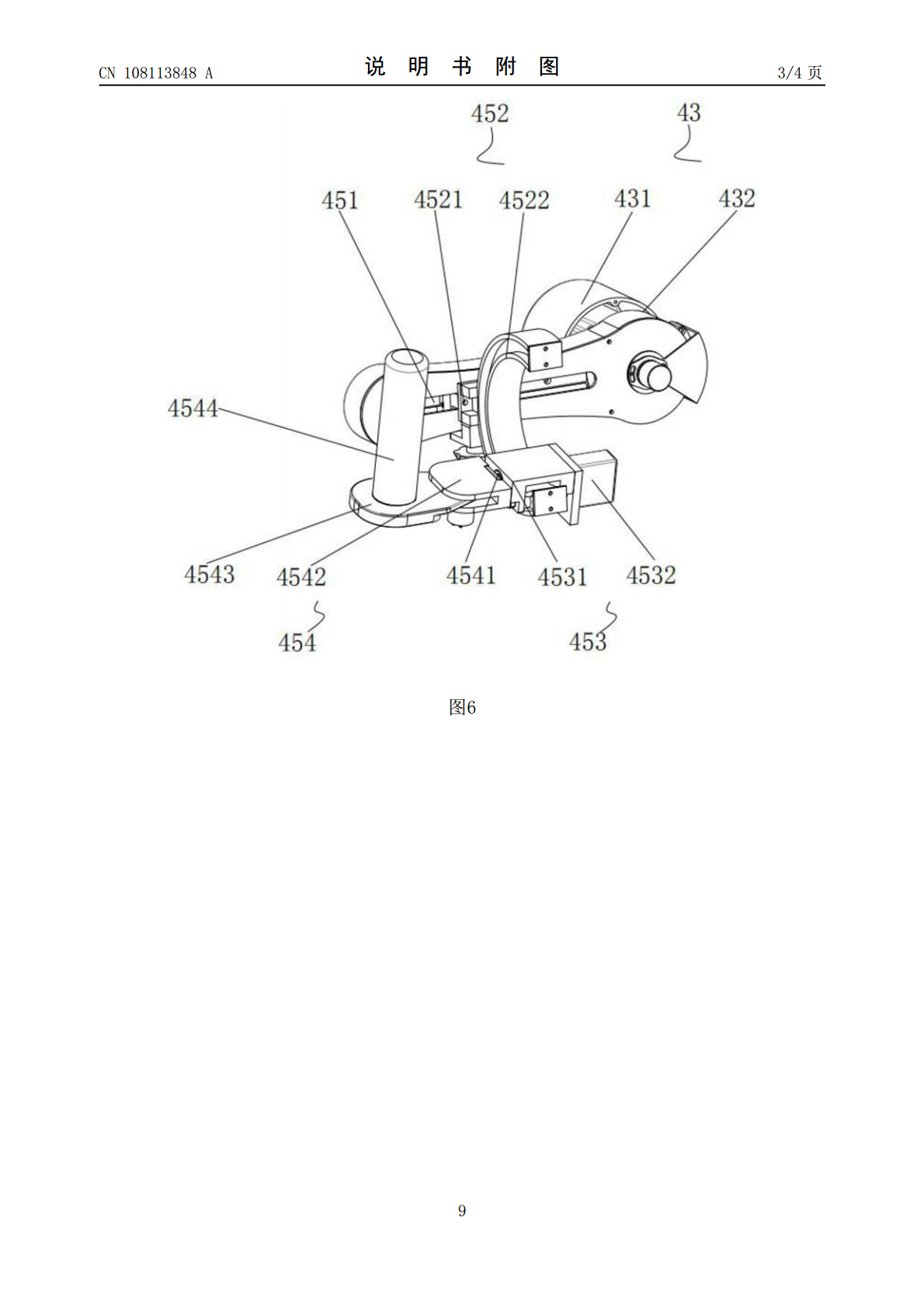
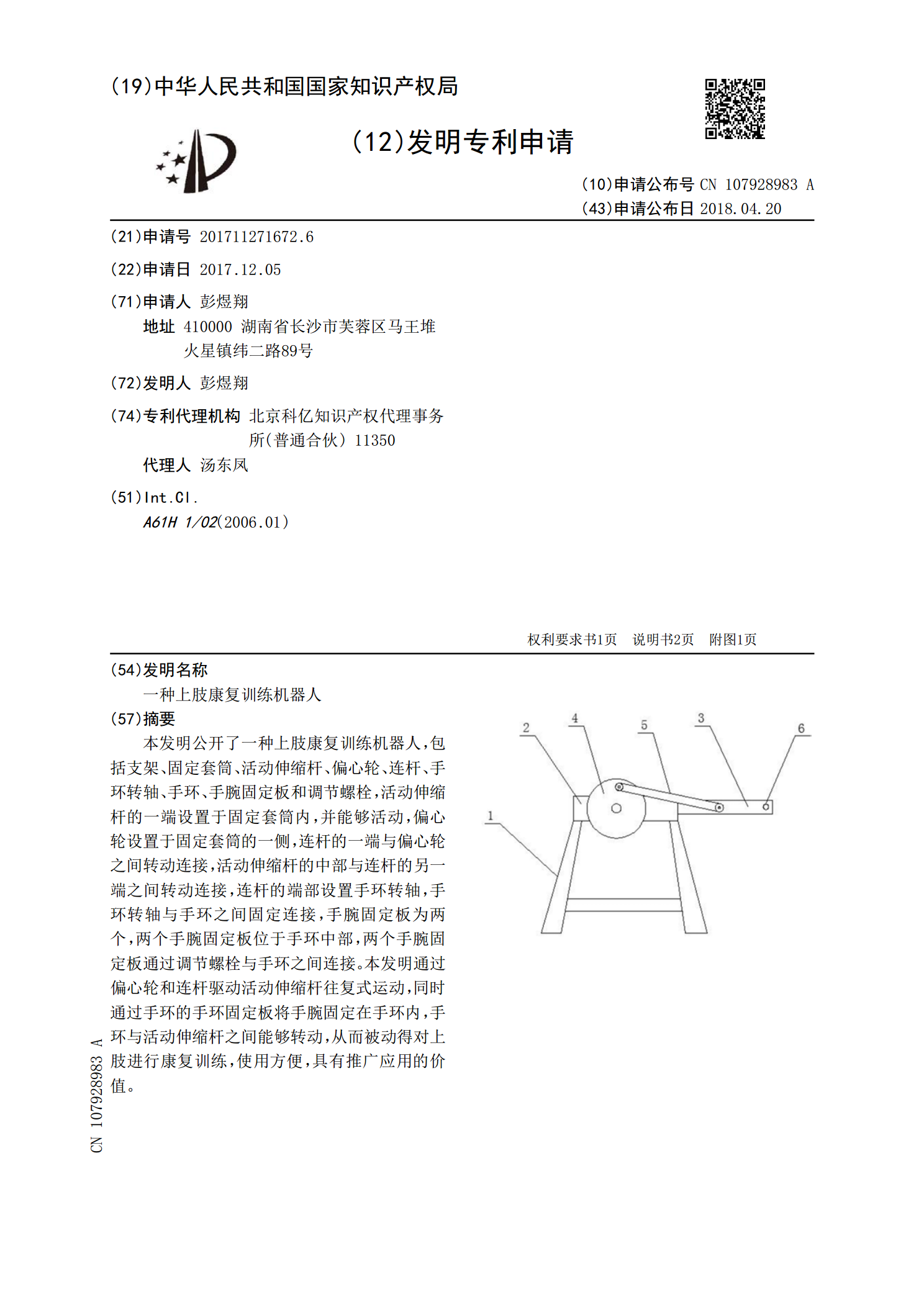
本发明公开了一种上肢康复训练机器人,包括支架、固定套筒、活动伸缩杆、偏心轮、连杆、手环转轴、手环、手腕固定板和调节螺栓,活动伸缩杆的一端设置于固定套筒内,并能够活动,偏心轮设置于固定套筒的一侧,连杆的一端与偏心轮之间转动连接,活动伸缩杆的中部与连杆的另一端之间转动连接,连杆的端部设置手环转轴,手环转轴与手环之间固定连接,手腕固定板为两个,两个手腕固定板位于手环中部,两个手腕固定板通过调节螺栓与手环之间连接。本发明通过偏心轮和连杆驱动活动伸缩杆往复式运动,同时通过手环的手环固定板将手腕固定在手环内,手环与活

基于ARM的上肢康复训练机器人系统设计.docx
基于ARM的上肢康复训练机器人系统设计随着健康意识的普及和老龄化程度的不断上升,上肢康复需求逐渐增加,因此研发智能化的上肢康复训练机器人系统变得尤为重要。基于ARM处理器集成的训练机器人系统,可以实现人机交互、运动控制等多个功能,该论文将探讨这种系统的设计原理、功能和应用等方面。1.系统设计原理ARM处理器具备低功耗、高性能、易开发等优势,可以满足上肢康复训练机器人系统的需求。该系统主要由机械臂、传感器、控制芯片、智能算法等多个模块组成,这些模块相互协作以实现对受训者的康复训练和评估。机械臂是该系统的核心