
定位装置、光刻设备、补偿平衡质量块转矩的方法和器件制造方法.pdf

梦影****主a

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
定位装置、光刻设备、补偿平衡质量块转矩的方法和器件制造方法.pdf
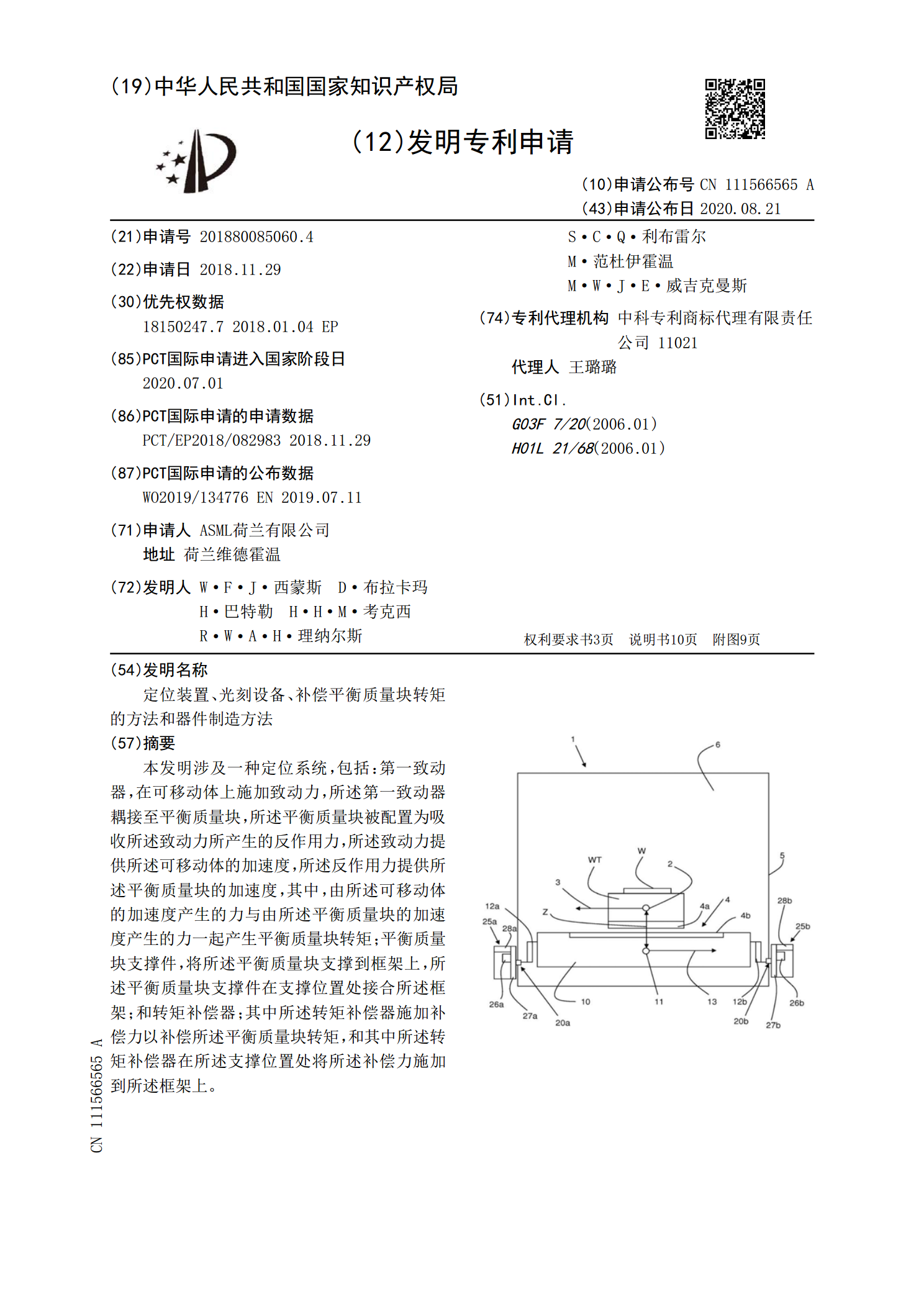
本发明涉及一种定位系统,包括:第一致动器,在可移动体上施加致动力,所述第一致动器耦接至平衡质量块,所述平衡质量块被配置为吸收所述致动力所产生的反作用力,所述致动力提供所述可移动体的加速度,所述反作用力提供所述平衡质量块的加速度,其中,由所述可移动体的加速度产生的力与由所述平衡质量块的加速度产生的力一起产生平衡质量块转矩;平衡质量块支撑件,将所述平衡质量块支撑到框架上,所述平衡质量块支撑件在支撑位置处接合所述框架;和转矩补偿器;其中所述转矩补偿器施加补偿力以补偿所述平衡质量块转矩,和其中所述转矩补偿器在所述
支撑装置、光刻装置和器件制造方法.pdf
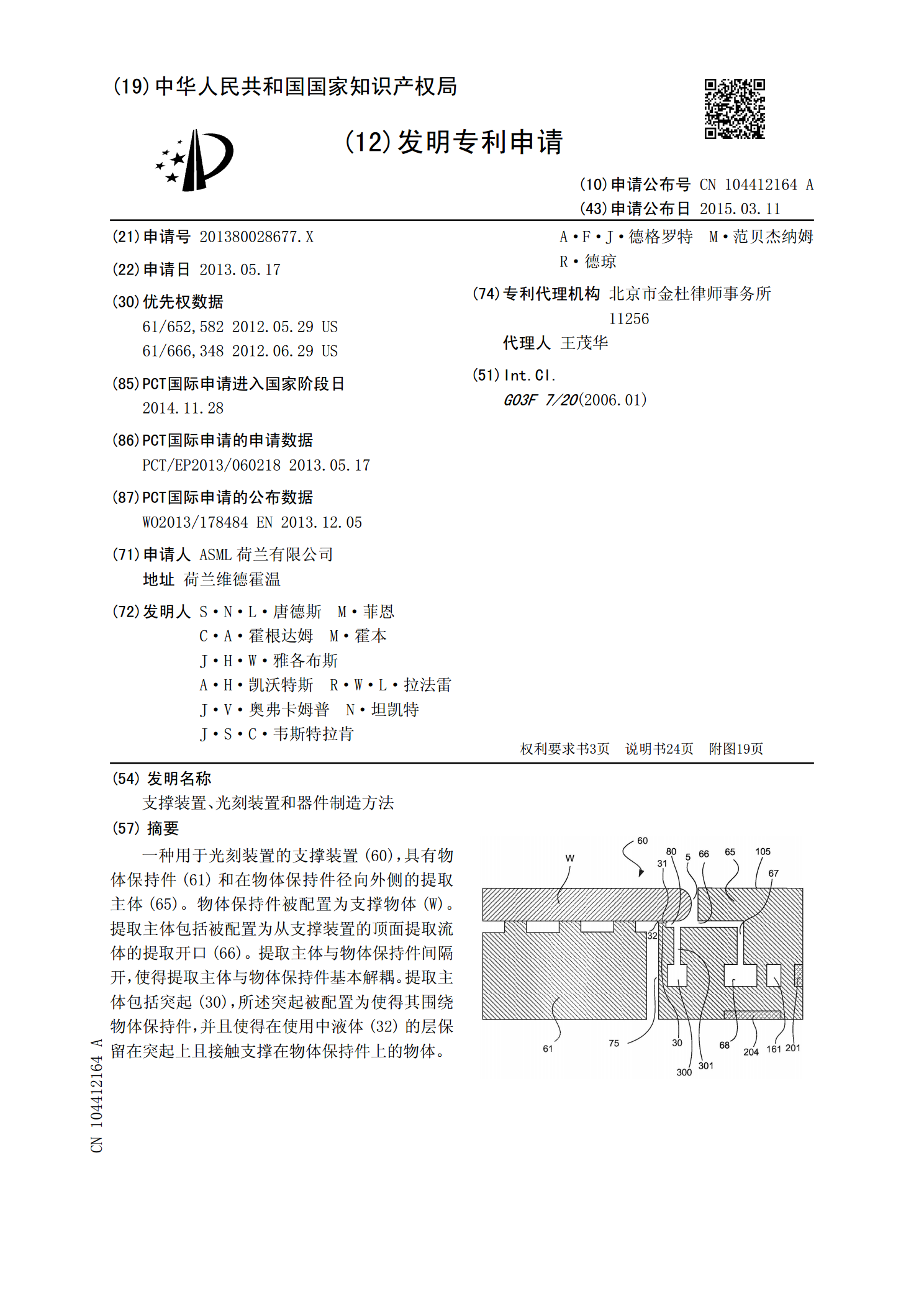
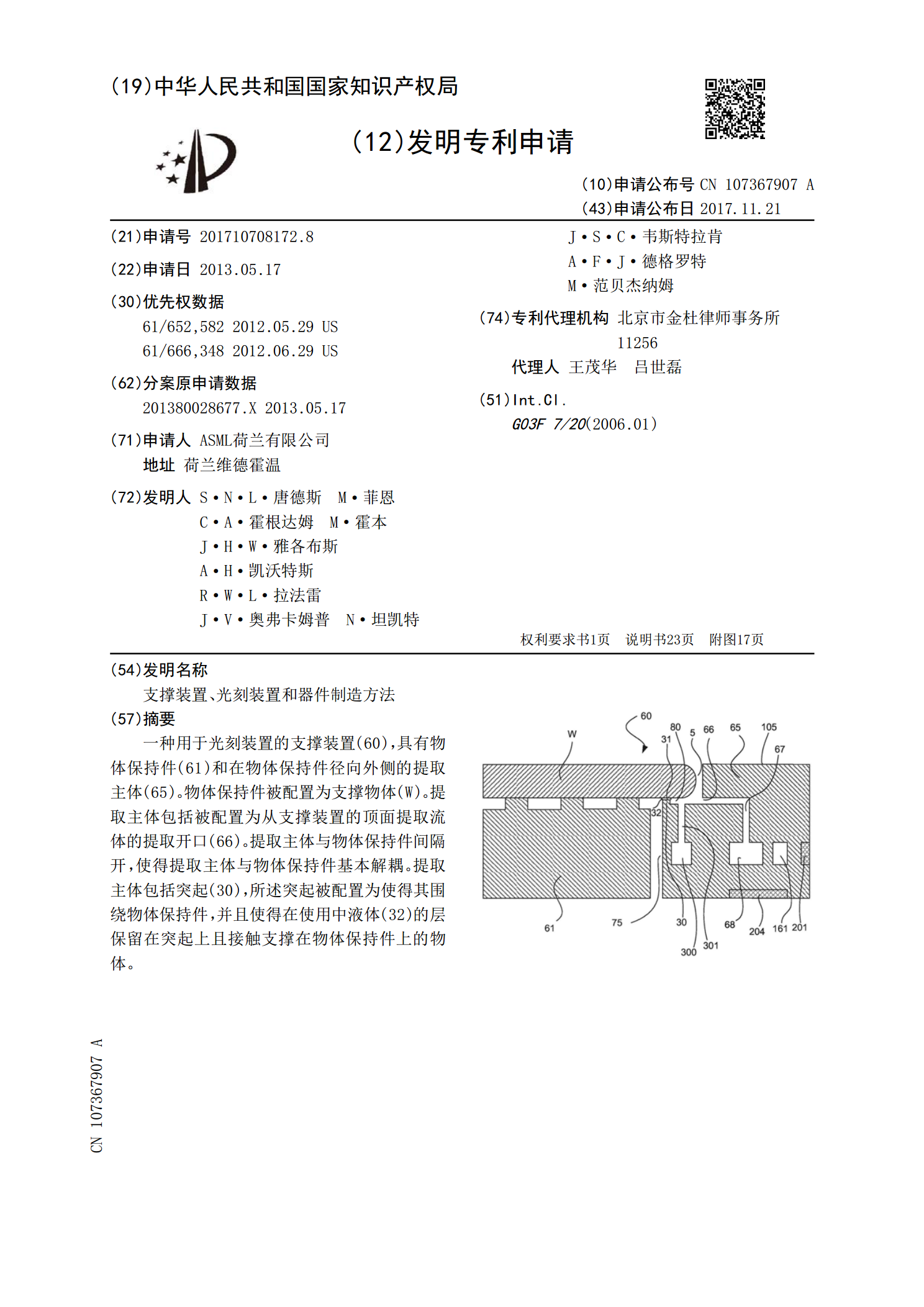
一种用于光刻装置的支撑装置(60),具有物体保持件(61)和在物体保持件径向外侧的提取主体(65)。物体保持件被配置为支撑物体(W)。提取主体包括被配置为从支撑装置的顶面提取流体的提取开口(66)。提取主体与物体保持件间隔开,使得提取主体与物体保持件基本解耦。提取主体包括突起(30),所述突起被配置为使得其围绕物体保持件,并且使得在使用中液体(32)的层保留在突起上且接触支撑在物体保持件上的物体。
支撑装置、光刻装置和器件制造方法.pdf
一种用于光刻装置的支撑装置(60),具有物体保持件(61)和在物体保持件径向外侧的提取主体(65)。物体保持件被配置为支撑物体(W)。提取主体包括被配置为从支撑装置的顶面提取流体的提取开口(66)。提取主体与物体保持件间隔开,使得提取主体与物体保持件基本解耦。提取主体包括突起(30),所述突起被配置为使得其围绕物体保持件,并且使得在使用中液体(32)的层保留在突起上且接触支撑在物体保持件上的物体。

光刻设备和器件制造方法.pdf
描述了一种表征多个衬底的形变的方法。该方法包括以下步骤:‑针对多个n个不同对准测量参数λ并且针对多个衬底测量对准标记的位置;‑将位置偏差确定为n个对准标记位置测量值与标称对准标记位置之间的差值;‑将位置偏差分组成数据集;‑确定平均数据集;‑从数据集中减去平均数据集以获取多个可变数据集;‑对可变数据集执行盲源分离方法,由此将可变数据集分解为表示可变数据集的主成分的特征晶片集合;‑将特征晶片集合细分成标记形变特征晶片集合和衬底形变特征晶片集合。
定位装置、光刻装置和物品制造方法.pdf
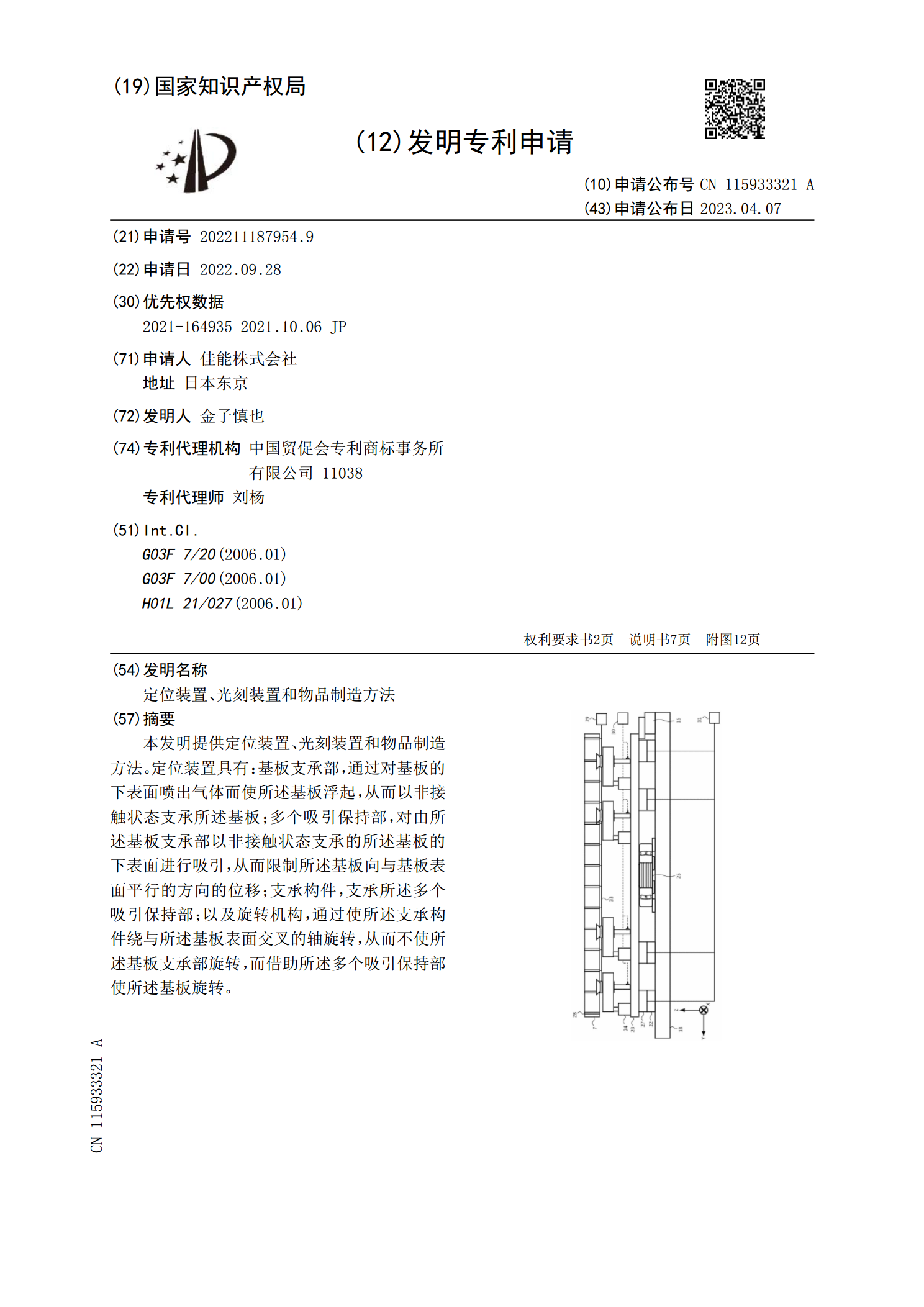
本发明提供定位装置、光刻装置和物品制造方法。定位装置具有:基板支承部,通过对基板的下表面喷出气体而使所述基板浮起,从而以非接触状态支承所述基板;多个吸引保持部,对由所述基板支承部以非接触状态支承的所述基板的下表面进行吸引,从而限制所述基板向与基板表面平行的方向的位移;支承构件,支承所述多个吸引保持部;以及旋转机构,通过使所述支承构件绕与所述基板表面交叉的轴旋转,从而不使所述基板支承部旋转,而借助所述多个吸引保持部使所述基板旋转。