
用于调节车辆组件的驱动设备.pdf

元容****少女


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于调节车辆组件的驱动设备.pdf
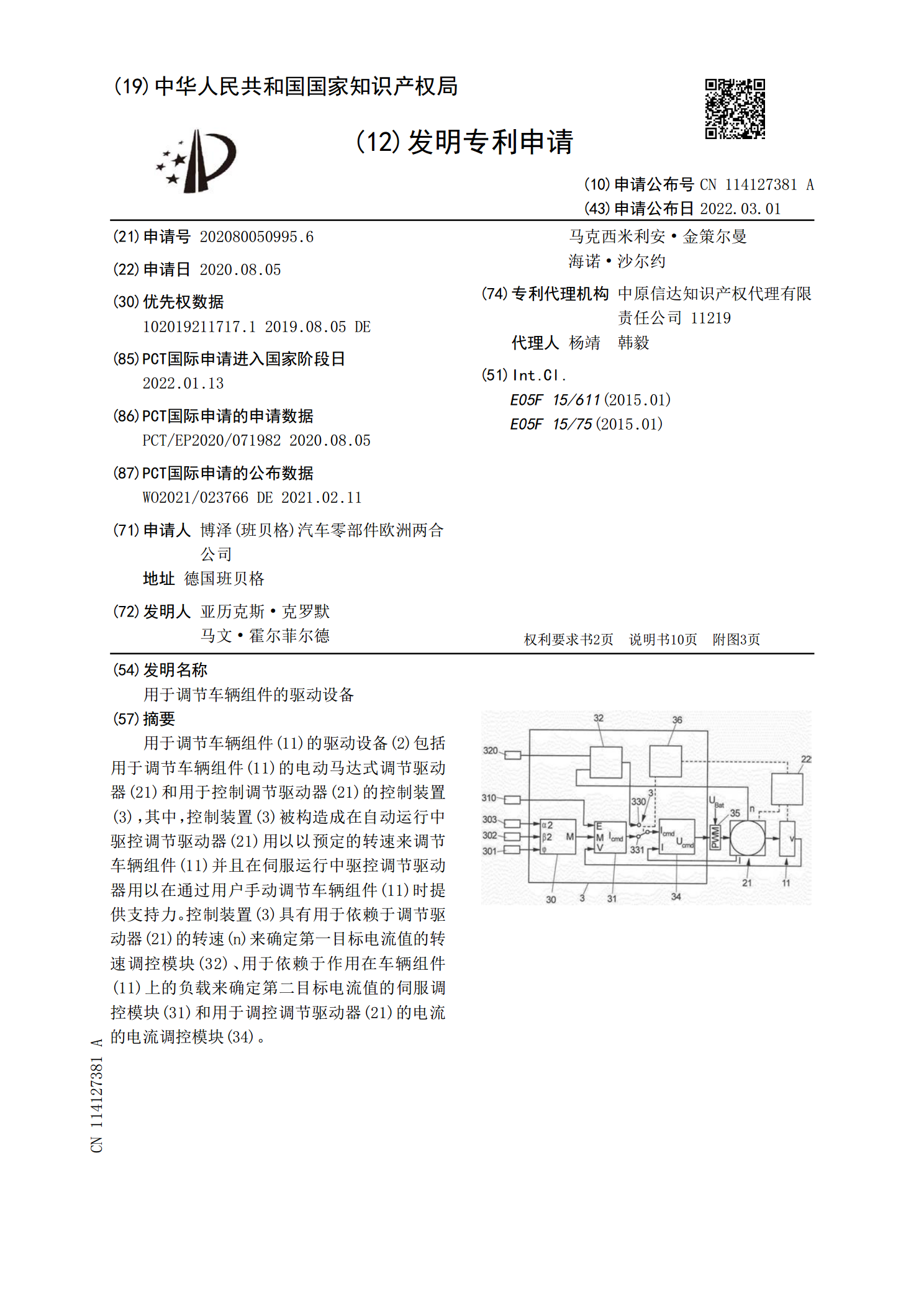
用于调节车辆组件(11)的驱动设备(2)包括用于调节车辆组件(11)的电动马达式调节驱动器(21)和用于控制调节驱动器(21)的控制装置(3),其中,控制装置(3)被构造成在自动运行中驱控调节驱动器(21)用以以预定的转速来调节车辆组件(11)并且在伺服运行中驱控调节驱动器用以在通过用户手动调节车辆组件(11)时提供支持力。控制装置(3)具有用于依赖于调节驱动器(21)的转速(n)来确定第一目标电流值的转速调控模块(32)、用于依赖于作用在车辆组件(11)上的负载来确定第二目标电流值的伺服调控模块(31)

具有电辅助驱动机构的用于人工驱动的车辆的驱动组件、用于调节该驱动组件的方法及应用.pdf
本发明涉及一种用于人工驱动的车辆(80)、特别是自行车或助力自行车的驱动组件(10),其具有电辅助驱动机构(24),其中,所述驱动组件(10)具有用于人工驱动机构的第一驱动轴(12)和所述电辅助驱动机构(24)的转子(20),并且所述第一驱动轴(12)和电辅助驱动机构(24)的转子(20)与共同的从动元件(29)联接,其中,所述第一驱动轴(12)和所述电辅助驱动机构(24)的转子(20)借助于谐波传动机构(25)与所述从动元件(29)联接,其中,所述谐波传动机构(25)具有带有内啮合部(62)的外套筒(2

用于有待调节的车辆子组件的调节设备.pdf
本发明涉及一种用于有待调节的车辆子组件的调节设备(10),该调节设备包括一台调节电动机,该电动机通过一个调节机构来驱动一个被分配给这个有待调节的车辆子组件的有齿的摇杆(12),其中该调节机构在结构上增强了该有待调节的车辆子组件,并且其中该在结构上进行增强的调节机构的一个调节蜗杆(20)直接作用在该有齿的摇杆(12)上。
用于车辆的驱动组件.pdf
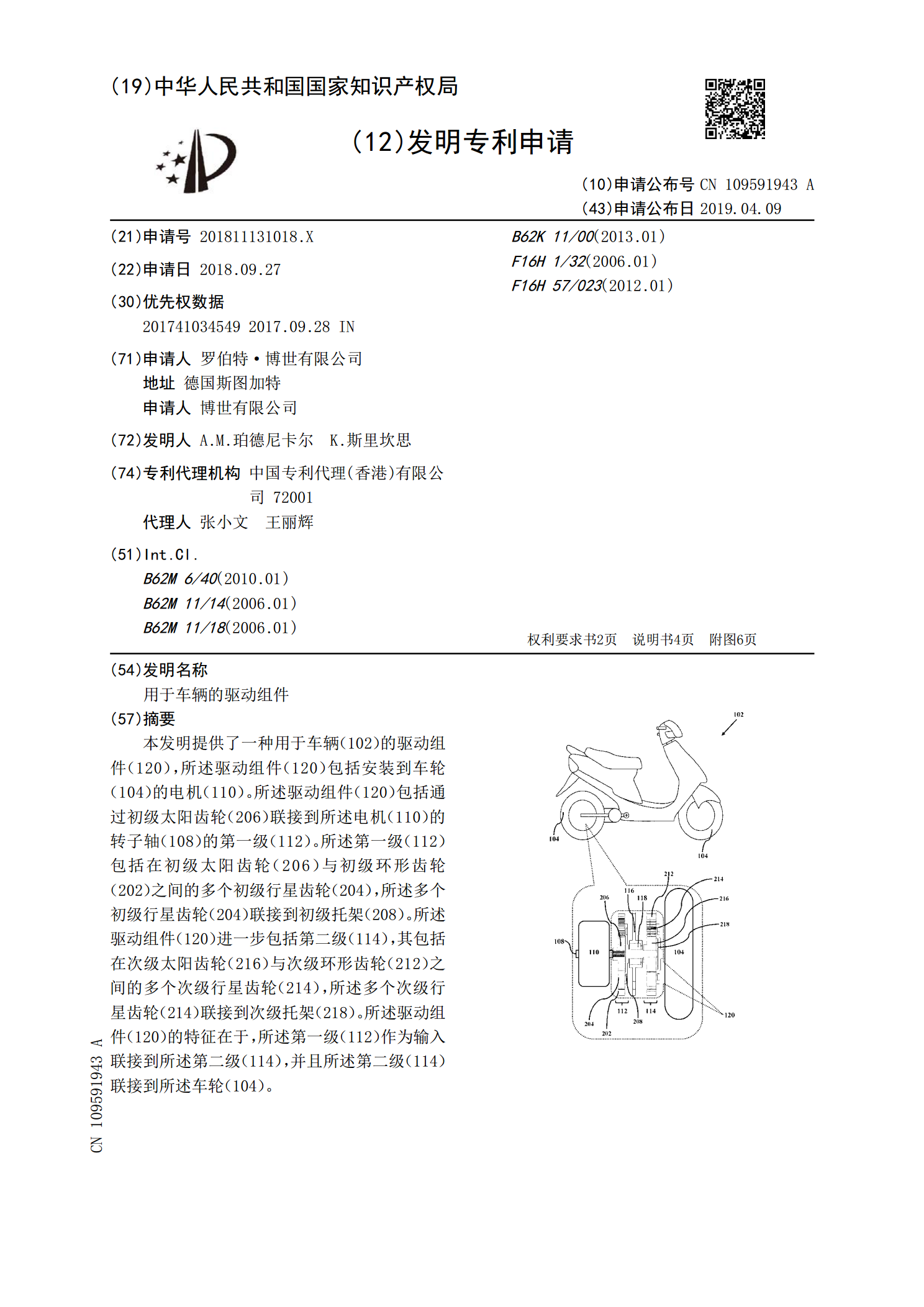
本发明提供了一种用于车辆(102)的驱动组件(120),所述驱动组件(120)包括安装到车轮(104)的电机(110)。所述驱动组件(120)包括通过初级太阳齿轮(206)联接到所述电机(110)的转子轴(108)的第一级(112)。所述第一级(112)包括在初级太阳齿轮(206)与初级环形齿轮(202)之间的多个初级行星齿轮(204),所述多个初级行星齿轮(204)联接到初级托架(208)。所述驱动组件(120)进一步包括第二级(114),其包括在次级太阳齿轮(216)与次级环形齿轮(212)之间的多个

用于车辆座椅的调节设备的调节驱动器.pdf
本发明提出一种用于车辆座椅的调节设备的调节驱动器,所述调节驱动器具有驱动马达(1)和两级的减速传动装置(4,5),所述两级的减速传动装置的第一减速传动级(4)在输入端上与所述驱动马达(1)连接并且在输出端上具有与螺旋齿轮(42)连接的偏心轮(43)并且所述两级的减速传动装置的第二减速传动级(5)包含摆动传动装置(6)、滑块耦联器(7)和驱动所述调节设备的输出元件(15),所述摆动传动装置具有齿圈(61)、摆动轮(62),所述摆动轮的外齿(621)与所述齿圈(61)的内齿(611)共同作用,所述输出元件(1