
用于提供末端执行器的装置、系统和方法.pdf

邻家****66

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于提供末端执行器的装置、系统和方法.pdf
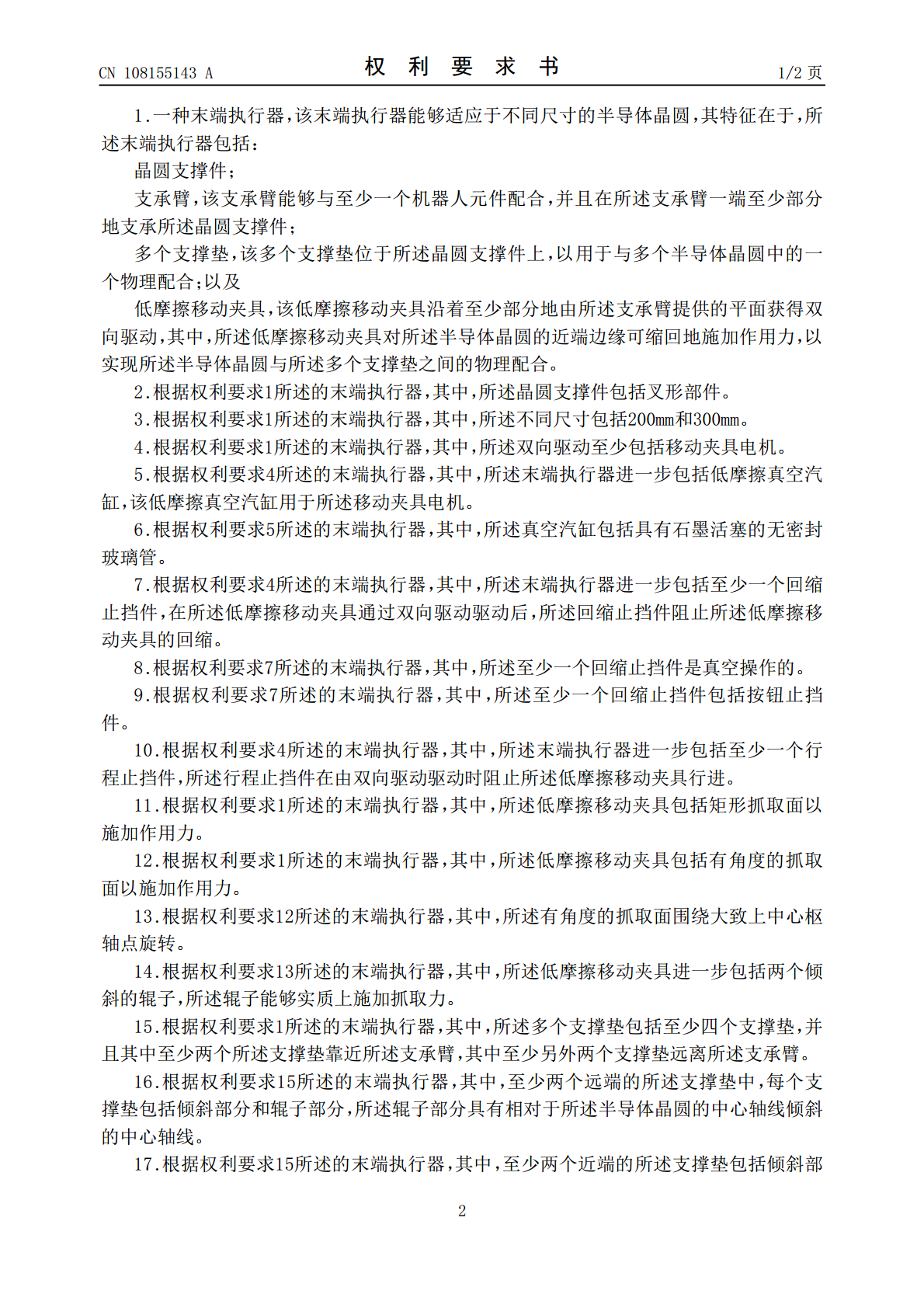
本发明提供了用于提供末端执行器的装置、系统和方法。所述末端执行器可以为能够适用不同尺寸的半导体晶圆,并可以包括以下部件:晶圆支撑件;支承臂,所述支承臂能够与至少一个机器人元件进行配合,且在所述支撑臂一端至少部分地支承该晶圆支撑件;多个支撑垫,所述多个支撑垫位于晶圆支撑件上,以用于与多个半导体晶圆中的一个物理配合;以及低摩擦移动夹具,所述低摩擦移动夹具,该低摩擦移动夹具沿着至少部分地由该支承臂提供的平面获得双向驱动,其中,所述低摩擦移动夹具对半导体晶圆的近端边缘可缩回地施加作用力。

用于铆接装置的末端执行器.pdf
本发明涉及一种用于铆接装置(1)的末端执行器,其中所述末端执行器(2)具有用于将铆接元件(4)加入到构件(5)中的铆接模块(3)、用于将铆接元件(4)从铆钉储存器(7)中输出的铆钉输出机构(6)以及用于将铆接元件(4)从所述铆钉输出机构(6)输送给所述铆接模块(3)的处理装置(8),其中所述处理装置(8)具有调节运动机构(9)和布置在其上的用于抓取所述铆接元件(1)的抓具(10)。提出,所述调节运动机构为了使所述抓具(10)定位而具有至少两个调节轴(A1、A2、A3、A4、A5、A6、A7)。

用于提供医疗装置的听觉消息的方法和系统.pdf
提供用于提供医疗装置的听觉消息的方法和系统。一个系统包括:至少一个医疗装置,其配置成产生多个医疗消息;和该至少一个医疗装置中的处理器,其配置成产生对应于所述多个医疗消息中的一个的听觉信号。该听觉信号基于使临床环境中的心理声音感知与声学和音乐声音变量联系的函数关系而配置。
用于提供预对准器的装置、系统和方法.pdf
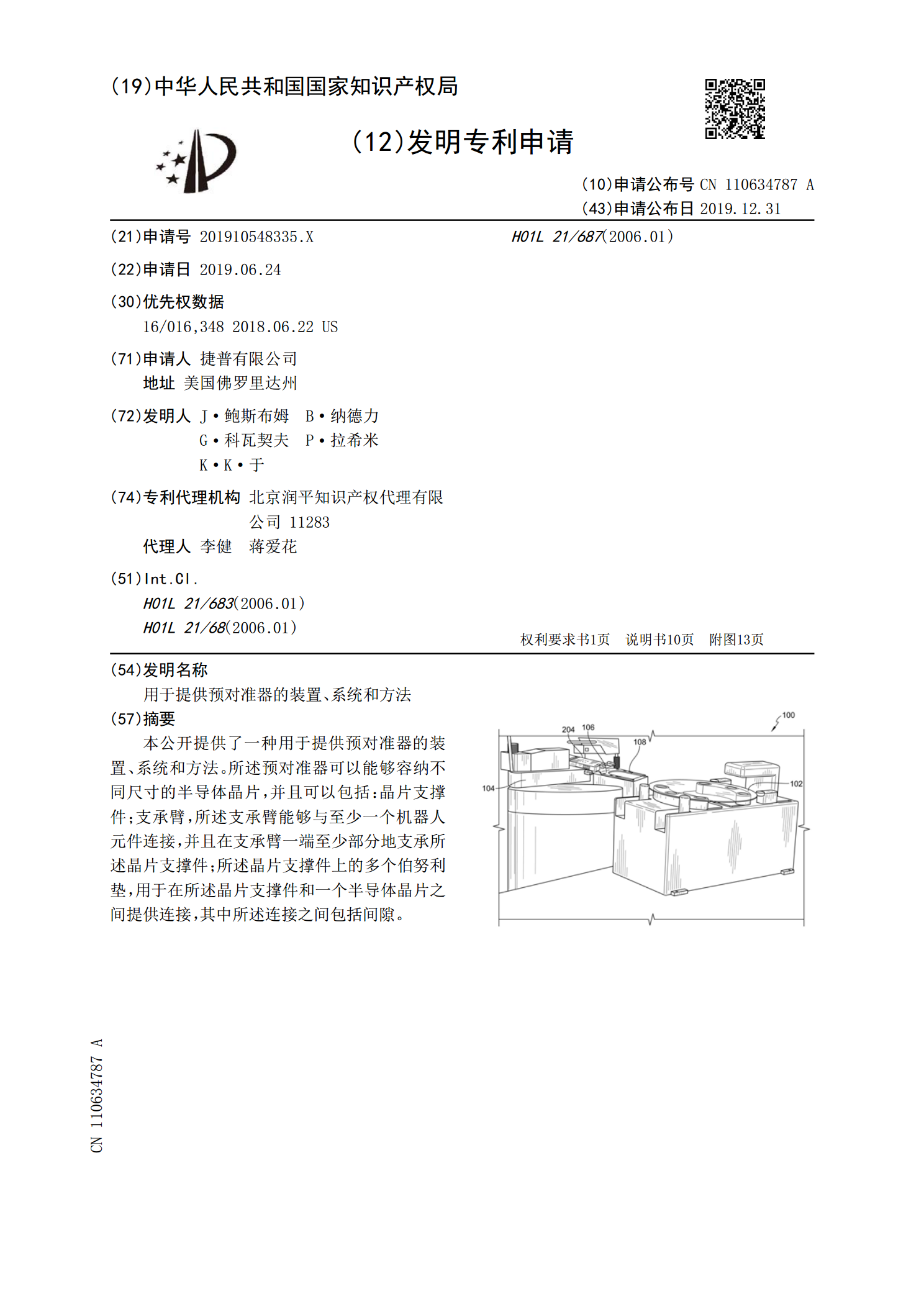
本公开提供了一种用于提供预对准器的装置、系统和方法。所述预对准器可以能够容纳不同尺寸的半导体晶片,并且可以包括:晶片支撑件;支承臂,所述支承臂能够与至少一个机器人元件连接,并且在支承臂一端至少部分地支承所述晶片支撑件;所述晶片支撑件上的多个伯努利垫,用于在所述晶片支撑件和一个半导体晶片之间提供连接,其中所述连接之间包括间隙。
末端执行器的控制系统以及末端执行器的控制方法.pdf
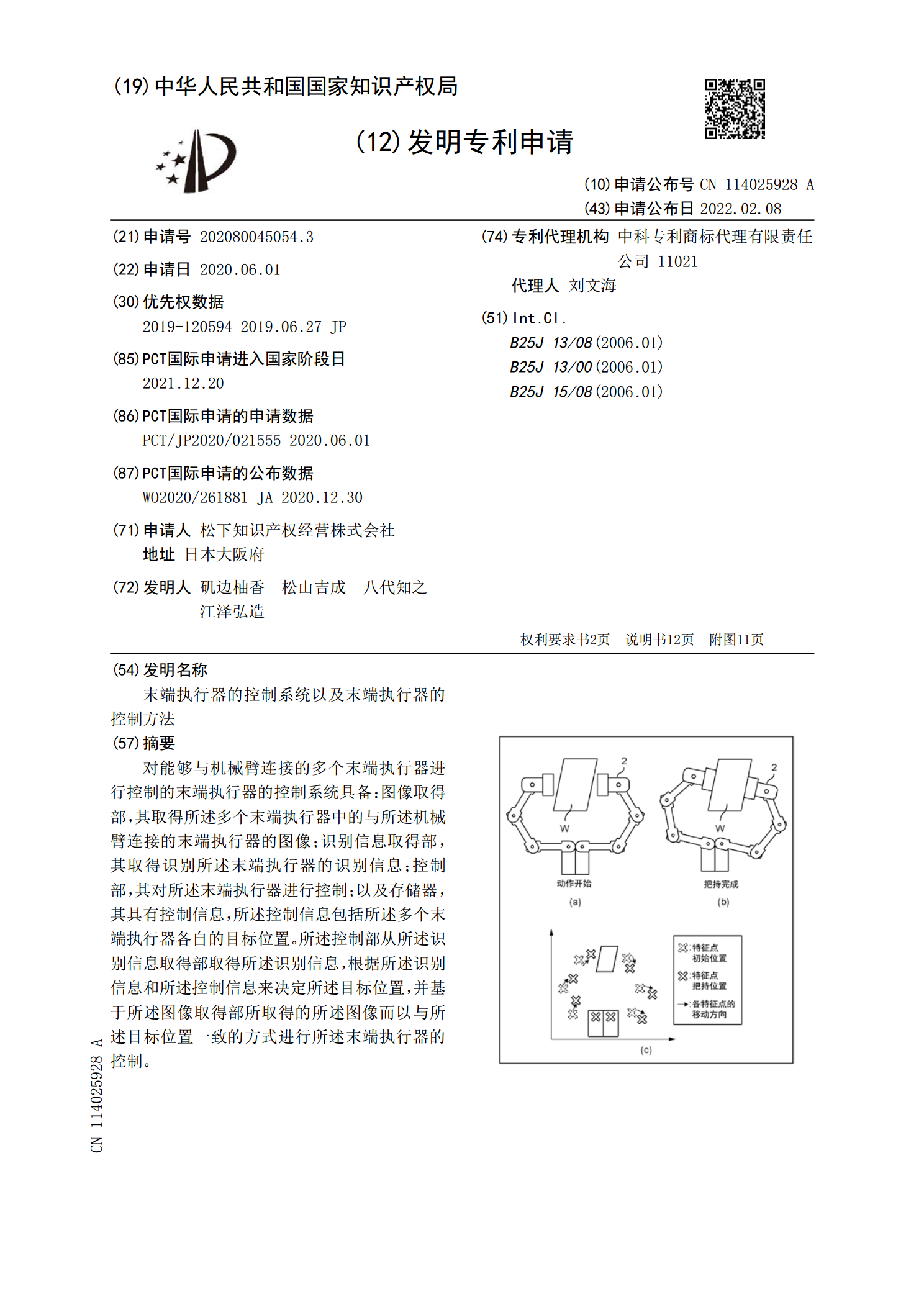
对能够与机械臂连接的多个末端执行器进行控制的末端执行器的控制系统具备:图像取得部,其取得所述多个末端执行器中的与所述机械臂连接的末端执行器的图像;识别信息取得部,其取得识别所述末端执行器的识别信息;控制部,其对所述末端执行器进行控制;以及存储器,其具有控制信息,所述控制信息包括所述多个末端执行器各自的目标位置。所述控制部从所述识别信息取得部取得所述识别信息,根据所述识别信息和所述控制信息来决定所述目标位置,并基于所述图像取得部所取得的所述图像而以与所述目标位置一致的方式进行所述末端执行器的控制。