
末端执行器的控制系统以及末端执行器的控制方法.pdf

努力****承悦

1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
末端执行器的控制系统以及末端执行器的控制方法.pdf
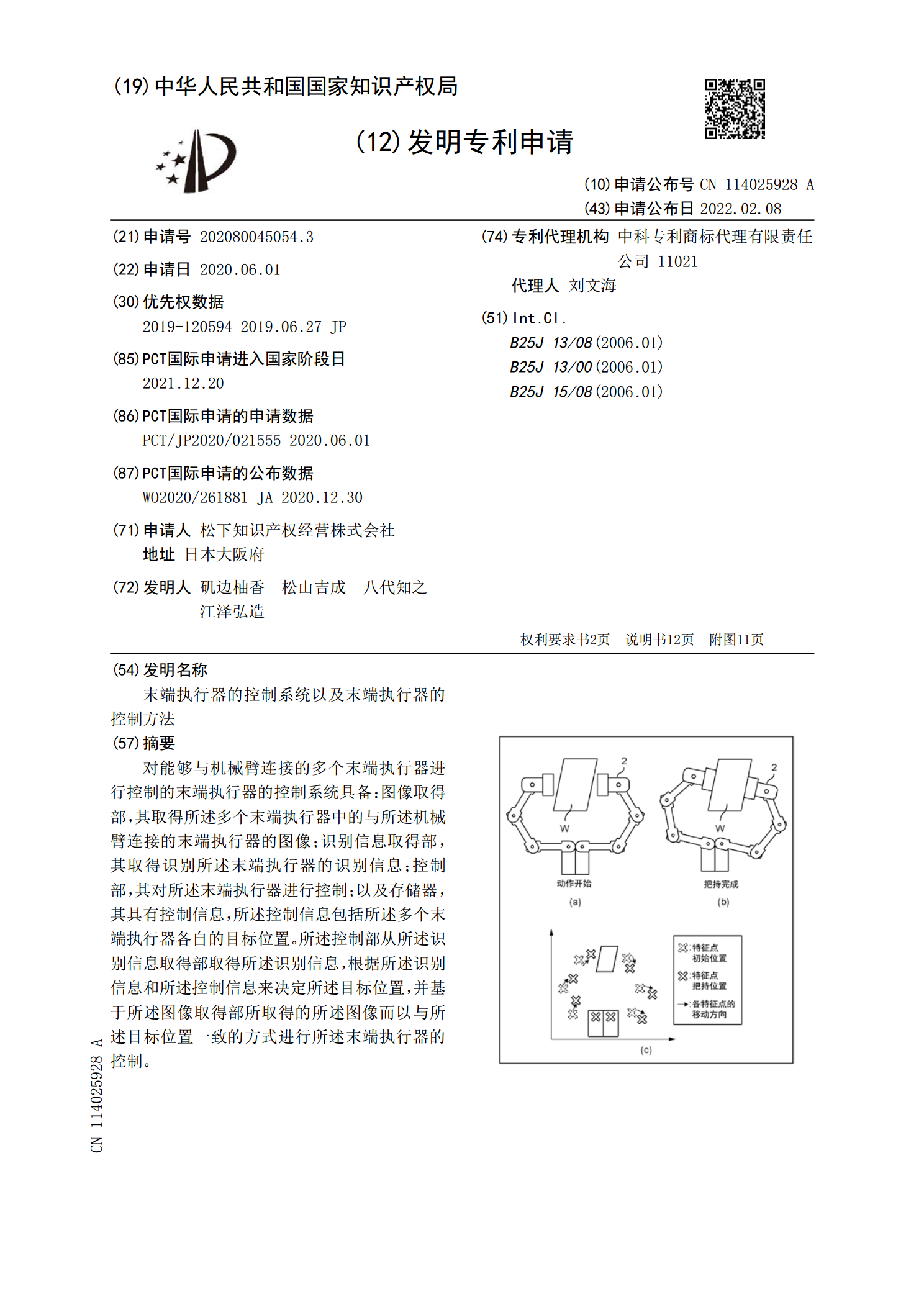
对能够与机械臂连接的多个末端执行器进行控制的末端执行器的控制系统具备:图像取得部,其取得所述多个末端执行器中的与所述机械臂连接的末端执行器的图像;识别信息取得部,其取得识别所述末端执行器的识别信息;控制部,其对所述末端执行器进行控制;以及存储器,其具有控制信息,所述控制信息包括所述多个末端执行器各自的目标位置。所述控制部从所述识别信息取得部取得所述识别信息,根据所述识别信息和所述控制信息来决定所述目标位置,并基于所述图像取得部所取得的所述图像而以与所述目标位置一致的方式进行所述末端执行器的控制。

末端执行器.pdf
本发明涉及一种用于操纵器(1)的末端执行器,其中,末端执行器与工件(2)共同作用,其中,对工具组件(5,6)设置有尤其设计为支架板的至少一个支架(3,4),并且其中,工具组件(5,6)用于与工件(2)共同作用。提出,支架(3,4)至少部分地由可变形的材料、尤其由可弹性变形的材料来设计,并且支架(3,4)关联有调节组件(7,8),通过调节组件(7,8)支架(3,4)可变形并且因此工具组件(5,6)可在空间中取向。
末端执行器以及拣选系统.pdf
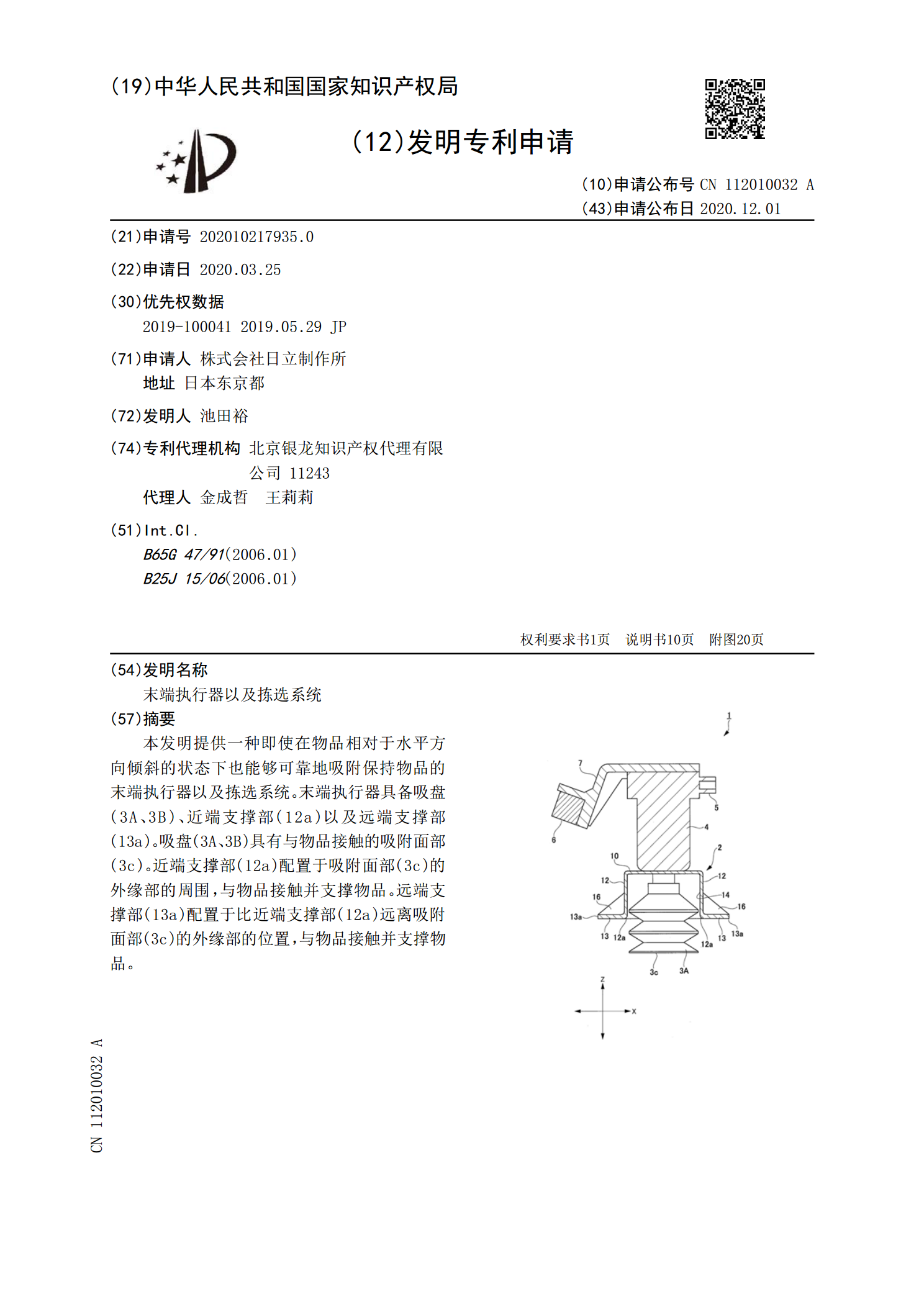
本发明提供一种即使在物品相对于水平方向倾斜的状态下也能够可靠地吸附保持物品的末端执行器以及拣选系统。末端执行器具备吸盘(3A、3B)、近端支撑部(12a)以及远端支撑部(13a)。吸盘(3A、3B)具有与物品接触的吸附面部(3c)。近端支撑部(12a)配置于吸附面部(3c)的外缘部的周围,与物品接触并支撑物品。远端支撑部(13a)配置于比近端支撑部(12a)远离吸附面部(3c)的外缘部的位置,与物品接触并支撑物品。

末端执行器组件.pdf
本发明涉及一种末端执行器组件,所述末端执行器组件带有用于操纵器(3)的末端执行器(2)并且带有用于所述末端执行器(2)的控制器(4),其中,所述末端执行器(2)具有工具组件(5),所述工具组件带有多个用于保持面型的工件(7)的抓取装置(6),其中,至少一个抓取装置(6)具有伯努利抓取单元(8),所述伯努利抓取单元具有流出单元(9),所述流出单元用于将流动S
钉合装置、末端执行器以及手术钉合装置.pdf
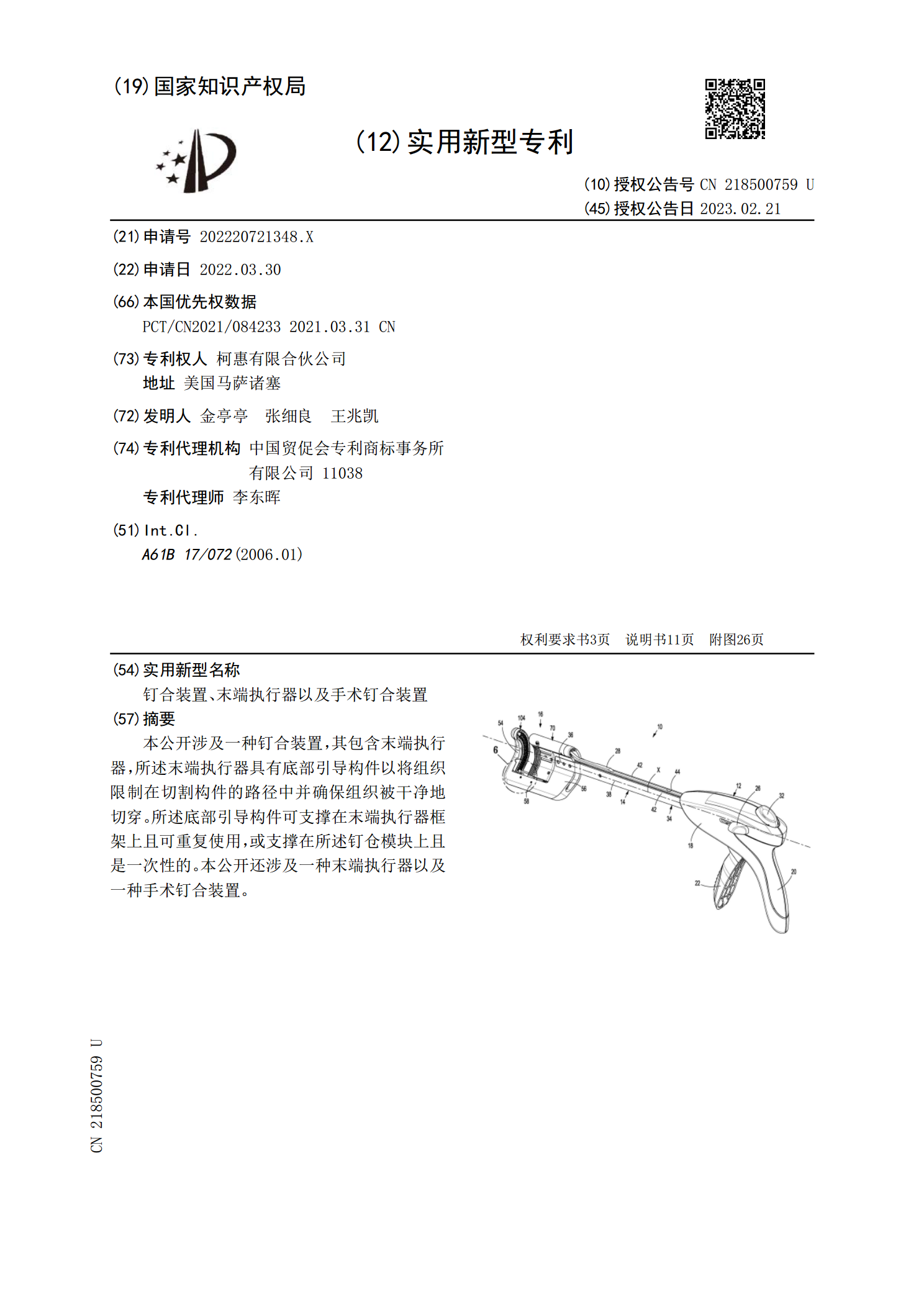
本公开涉及一种钉合装置,其包含末端执行器,所述末端执行器具有底部引导构件以将组织限制在切割构件的路径中并确保组织被干净地切穿。所述底部引导构件可支撑在末端执行器框架上且可重复使用,或支撑在所述钉仓模块上且是一次性的。本公开还涉及一种末端执行器以及一种手术钉合装置。