
用于提供预对准器的装置、系统和方法.pdf

mm****酱吖

1/10
2/10

3/10

4/10
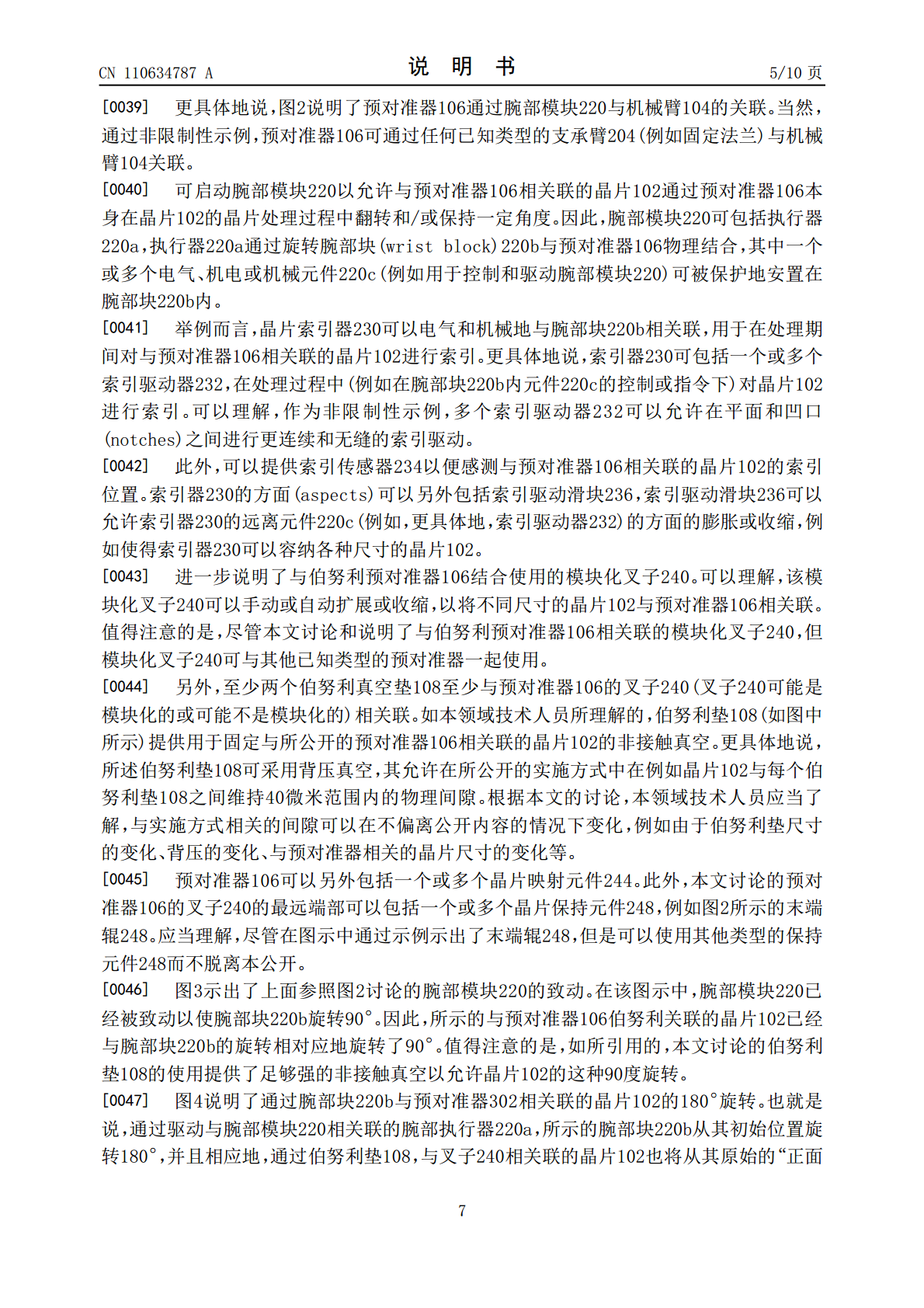
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于提供预对准器的装置、系统和方法.pdf
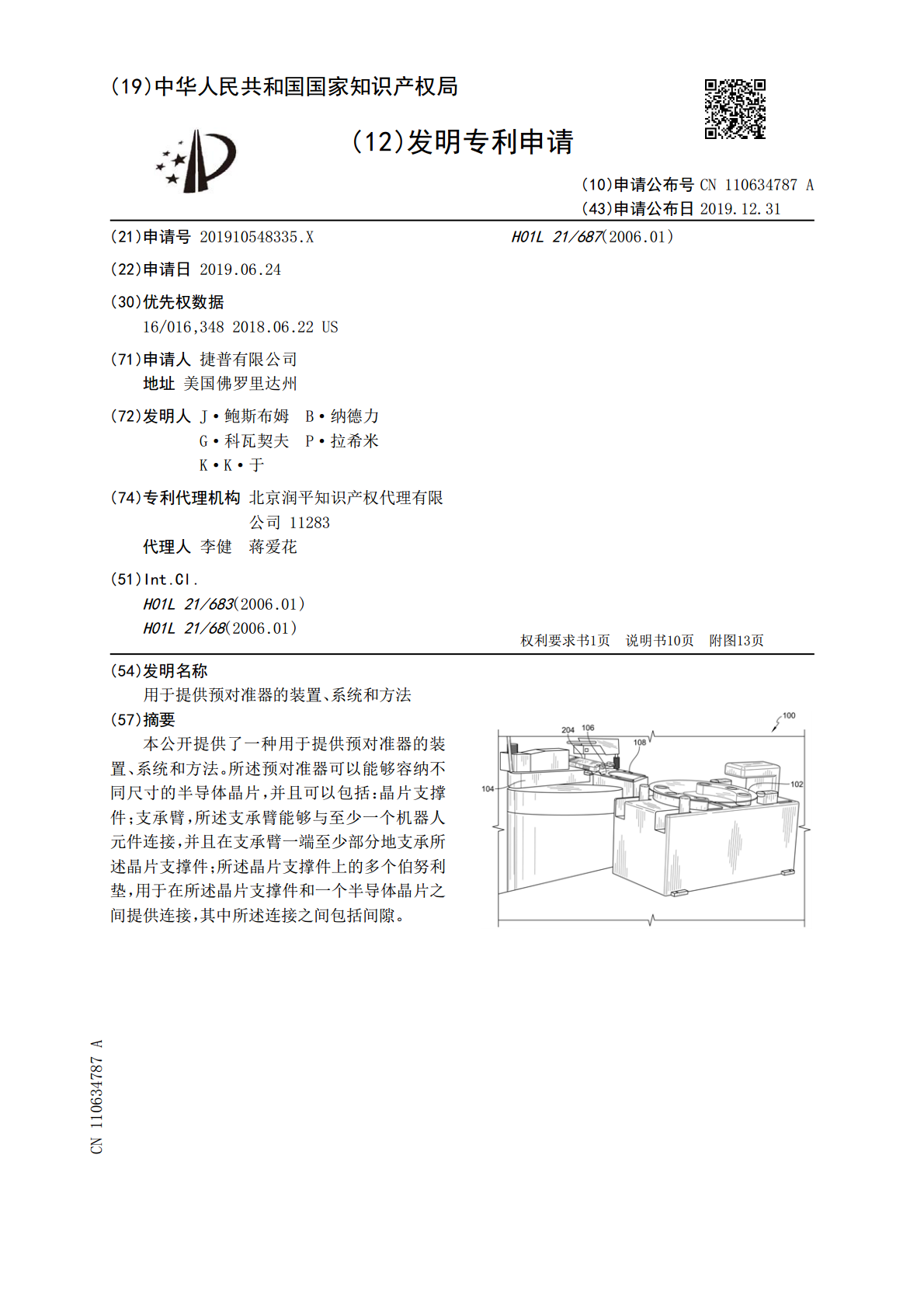
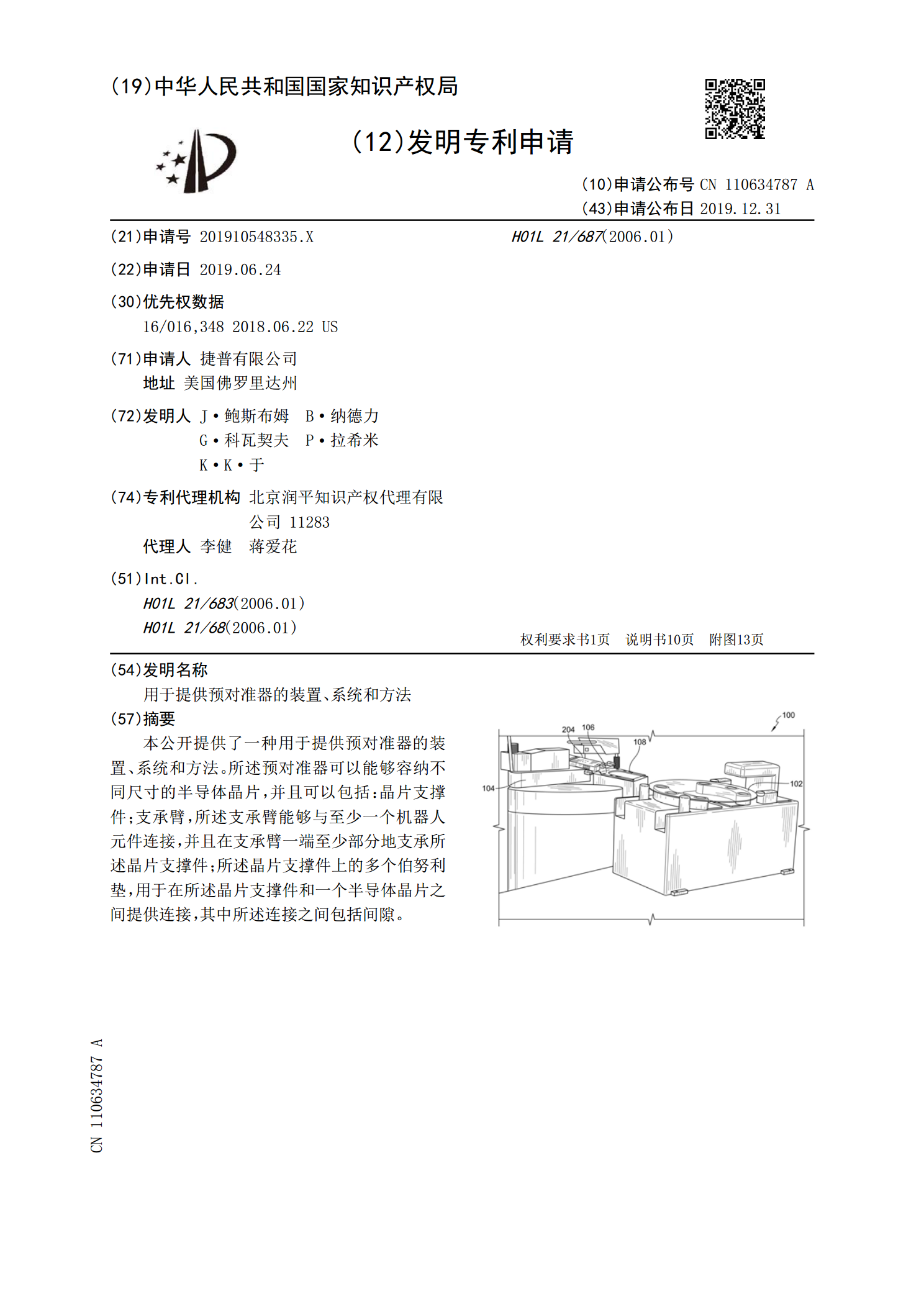
本公开提供了一种用于提供预对准器的装置、系统和方法。所述预对准器可以能够容纳不同尺寸的半导体晶片,并且可以包括:晶片支撑件;支承臂,所述支承臂能够与至少一个机器人元件连接,并且在支承臂一端至少部分地支承所述晶片支撑件;所述晶片支撑件上的多个伯努利垫,用于在所述晶片支撑件和一个半导体晶片之间提供连接,其中所述连接之间包括间隙。

用于提供末端执行器的装置、系统和方法.pdf
本发明提供了用于提供末端执行器的装置、系统和方法。所述末端执行器可以为能够适用不同尺寸的半导体晶圆,并可以包括以下部件:晶圆支撑件;支承臂,所述支承臂能够与至少一个机器人元件进行配合,且在所述支撑臂一端至少部分地支承该晶圆支撑件;多个支撑垫,所述多个支撑垫位于晶圆支撑件上,以用于与多个半导体晶圆中的一个物理配合;以及低摩擦移动夹具,所述低摩擦移动夹具,该低摩擦移动夹具沿着至少部分地由该支承臂提供的平面获得双向驱动,其中,所述低摩擦移动夹具对半导体晶圆的近端边缘可缩回地施加作用力。

用于对准纸箱坯件的堆叠的对准装置、系统和方法.pdf
本发明涉及用于对准纸箱坯件的堆叠的对准装置、系统和方法。提供了一种用于对准堆叠的纸箱坯件的对准装置:纸箱坯件包括第一边缘和第二边缘,第二边缘与第一边缘相对地定位。对准装置至少包括第一对准构件和第二对准构件。第一对准构件被布置为与第一边缘相邻并且适于向第一边缘施加力,并且其中第二对准构件布置成与第二边缘相对并且适于向第二边缘施加力,并且第一对准构件是辊。

用于提供医疗装置的听觉消息的方法和系统.pdf
提供用于提供医疗装置的听觉消息的方法和系统。一个系统包括:至少一个医疗装置,其配置成产生多个医疗消息;和该至少一个医疗装置中的处理器,其配置成产生对应于所述多个医疗消息中的一个的听觉信号。该听觉信号基于使临床环境中的心理声音感知与声学和音乐声音变量联系的函数关系而配置。

用于涡旋件对准的方法和装置.pdf
一种压缩机,该压缩机可以包括壳、支撑在壳内的轴承座、绕动涡旋件、与绕动涡旋件啮合地接合的非绕动涡旋件、紧固件以及传动轴。轴承座可以包括限定孔的中央本体以及从中央本体径向向外延伸并且限定周向延伸的凹槽的臂。周向延伸的凹槽可以包括内侧壁、外侧壁和基部区域,该基部区域在内侧壁与外侧壁之间区域性地延伸并且限定了紧固件容纳孔口。绕动涡旋件可以支撑在轴承座上,并且非绕动涡旋件可以与绕动涡旋件啮合地接合并且可以包括限定凸缘孔口的凸缘。紧固件可以延伸穿过凸缘孔口和紧固件容纳孔口并将非绕动涡旋件紧固至轴承座。传动轴可以延伸