
一种可举升的小型重载全向AGV小车.pdf

是秋****写意


1/8

2/8

3/8

4/8

5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可举升的小型重载全向AGV小车.pdf
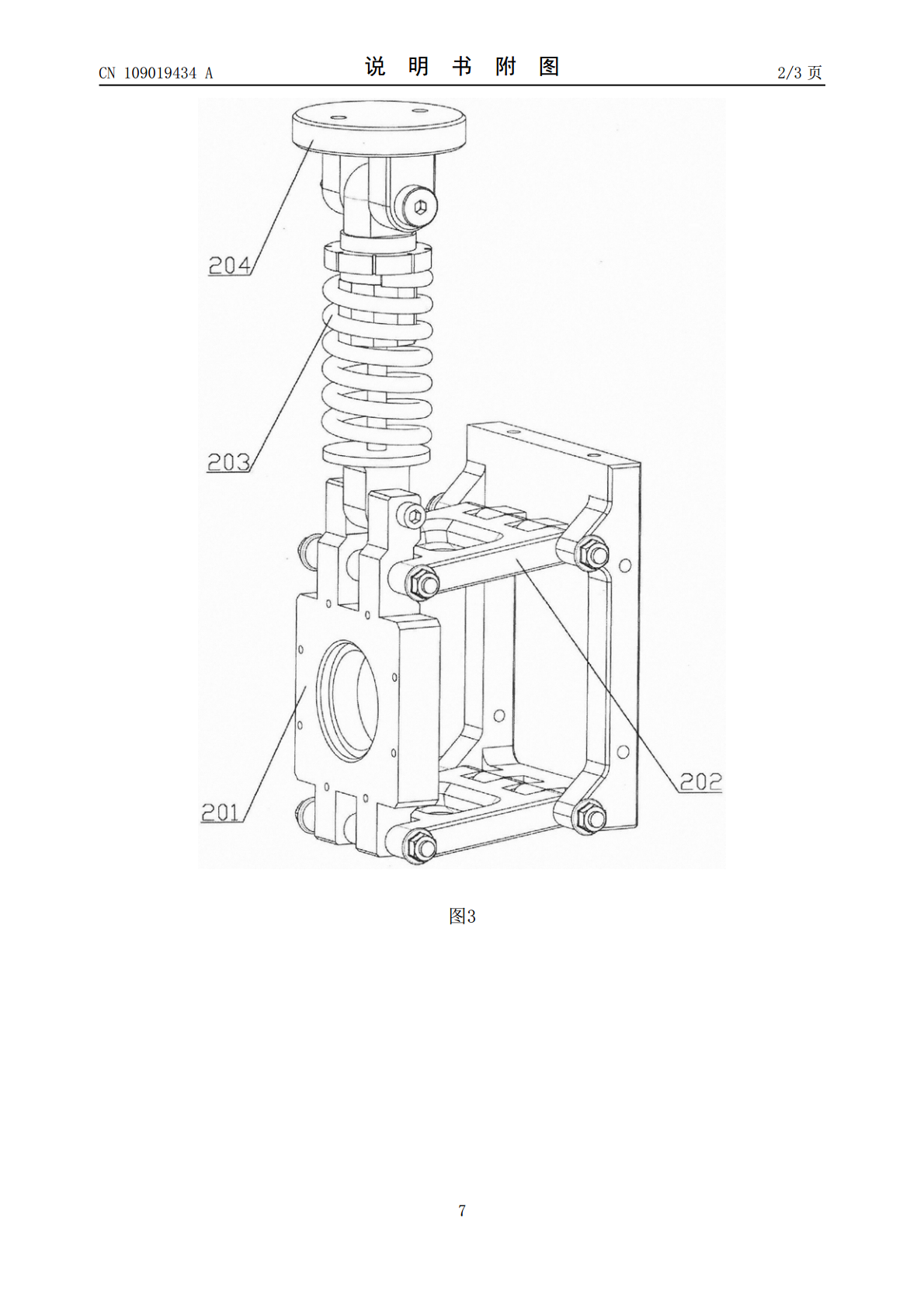
本发明公开了一种可举升的小型重载全向AGV小车,属于工业自动化和物流仓储技术领域。所述的车身框架上安装有四个轮组悬挂系统,且每个轮组悬挂系统下方安装有车轮模组,所述的举升机构安装在车身框架内部;该可举升的小型重载全向AGV小车将精密摆线针轮减速器应用于车轮模组,提高了车轮的承重能力和转矩,同时减小车轮所占用的安装空间,使得车身框架内有足够大的空间用于安装举升机构,举升机构为特殊的双联举升机构,结构紧凑,多个支承臂同时工作得到的举升力较大,举升动作十分平稳,适用于自动化和物流仓储。

一种重载举升式AGV小车.pdf
本发明公开一种重载举升式AGV小车;磁条铺设于地面,磁导航传感器安装于车架上,磁导航传感器输送采样信号至工业无线移动通讯模块,工业无线移动通讯模块安装在车架上并控制浮动式舵轮机构沿磁条驱动,万向脚轮安装在车架底部支撑车架;升降机安装在车架中,而工作台安装在升降机上;电池安装在车架上分别为磁导航传感器、浮动式舵轮机构、工业无线移动通讯模块及升降机供电,而工业无线移动通讯模块分别与磁导航传感器、浮动式舵轮机构及升降机电连接并由中央调度系统控制其工作。本发明实现高效、准确、灵活地完成物料输送,实现物流自动化,提
一种超薄重载举升潜入全向移动式AGV.pdf
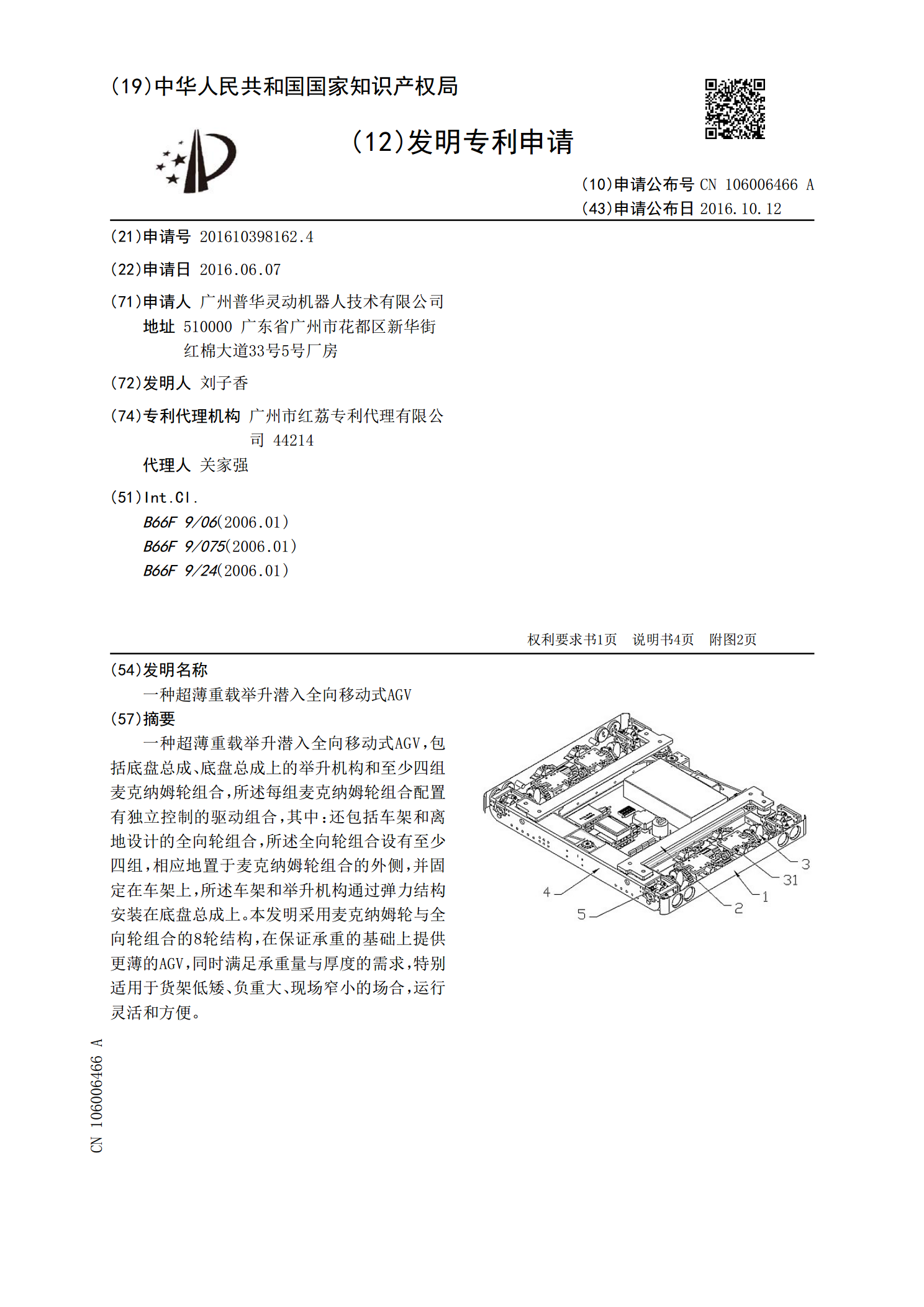
一种超薄重载举升潜入全向移动式AGV,包括底盘总成、底盘总成上的举升机构和至少四组麦克纳姆轮组合,所述每组麦克纳姆轮组合配置有独立控制的驱动组合,其中:还包括车架和离地设计的全向轮组合,所述全向轮组合设有至少四组,相应地置于麦克纳姆轮组合的外侧,并固定在车架上,所述车架和举升机构通过弹力结构安装在底盘总成上。本发明采用麦克纳姆轮与全向轮组合的8轮结构,在保证承重的基础上提供更薄的AGV,同时满足承重量与厚度的需求,特别适用于货架低矮、负重大、现场窄小的场合,运行灵活和方便。

一种超薄举升全向AGV.pdf
本发明涉及一种超薄举升全向AGV,具有车体底板,车体底板底部四角上内嵌装有万向轮,车体底板的底面中部前后两侧位置上内嵌装有两套差速驱动单元;车体底板上面装有凸轮举升机构;所述举升框架为矩形框架,所述导向机构包括有导向柱和导向轮,其中导向柱设置在车体底板上面,导向轮固定安装在举升框架的左右两侧中间部位,导向轮沿着导向柱上下滚动;本发明AGV小车能够以超低高度潜入料车底部进行托举搬运料车,行动灵活方便,搬运效率高。
一种双举升AGV小车.pdf
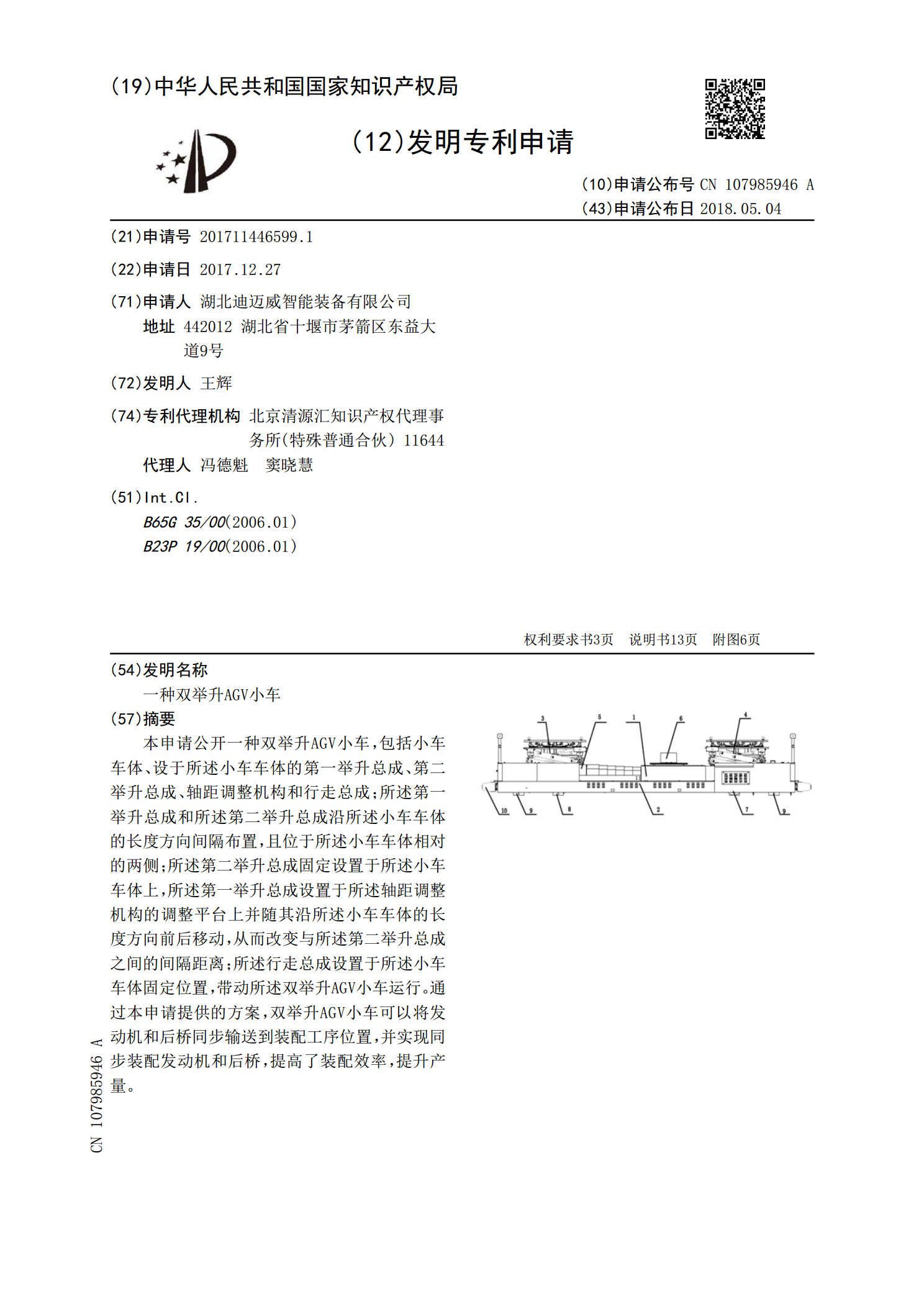
本申请公开一种双举升AGV小车,包括小车车体、设于所述小车车体的第一举升总成、第二举升总成、轴距调整机构和行走总成;所述第一举升总成和所述第二举升总成沿所述小车车体的长度方向间隔布置,且位于所述小车车体相对的两侧;所述第二举升总成固定设置于所述小车车体上,所述第一举升总成设置于所述轴距调整机构的调整平台上并随其沿所述小车车体的长度方向前后移动,从而改变与所述第二举升总成之间的间隔距离;所述行走总成设置于所述小车车体固定位置,带动所述双举升AGV小车运行。通过本申请提供的方案,双举升AGV小车可以将发动机和