
一种船舶舱室爬壁装置.pdf

黛娥****ak


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种船舶舱室爬壁装置.pdf
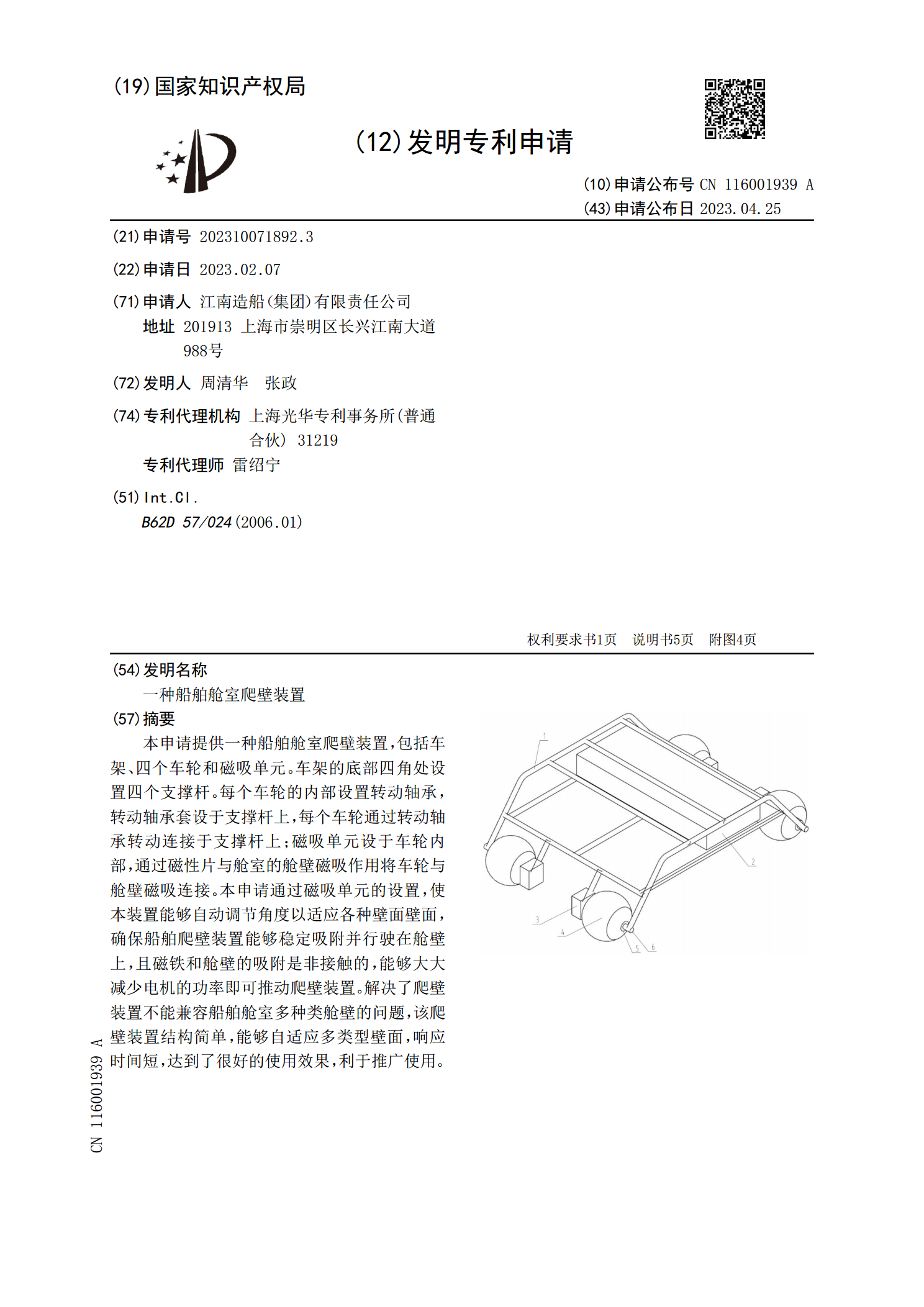
本申请提供一种船舶舱室爬壁装置,包括车架、四个车轮和磁吸单元。车架的底部四角处设置四个支撑杆。每个车轮的内部设置转动轴承,转动轴承套设于支撑杆上,每个车轮通过转动轴承转动连接于支撑杆上;磁吸单元设于车轮内部,通过磁性片与舱室的舱壁磁吸作用将车轮与舱壁磁吸连接。本申请通过磁吸单元的设置,使本装置能够自动调节角度以适应各种壁面壁面,确保船舶爬壁装置能够稳定吸附并行驶在舱壁上,且磁铁和舱壁的吸附是非接触的,能够大大减少电机的功率即可推动爬壁装置。解决了爬壁装置不能兼容船舶舱室多种类舱壁的问题,该爬壁装置结构简单
一种船舶爬壁清洗车系统及其控制装置.pdf
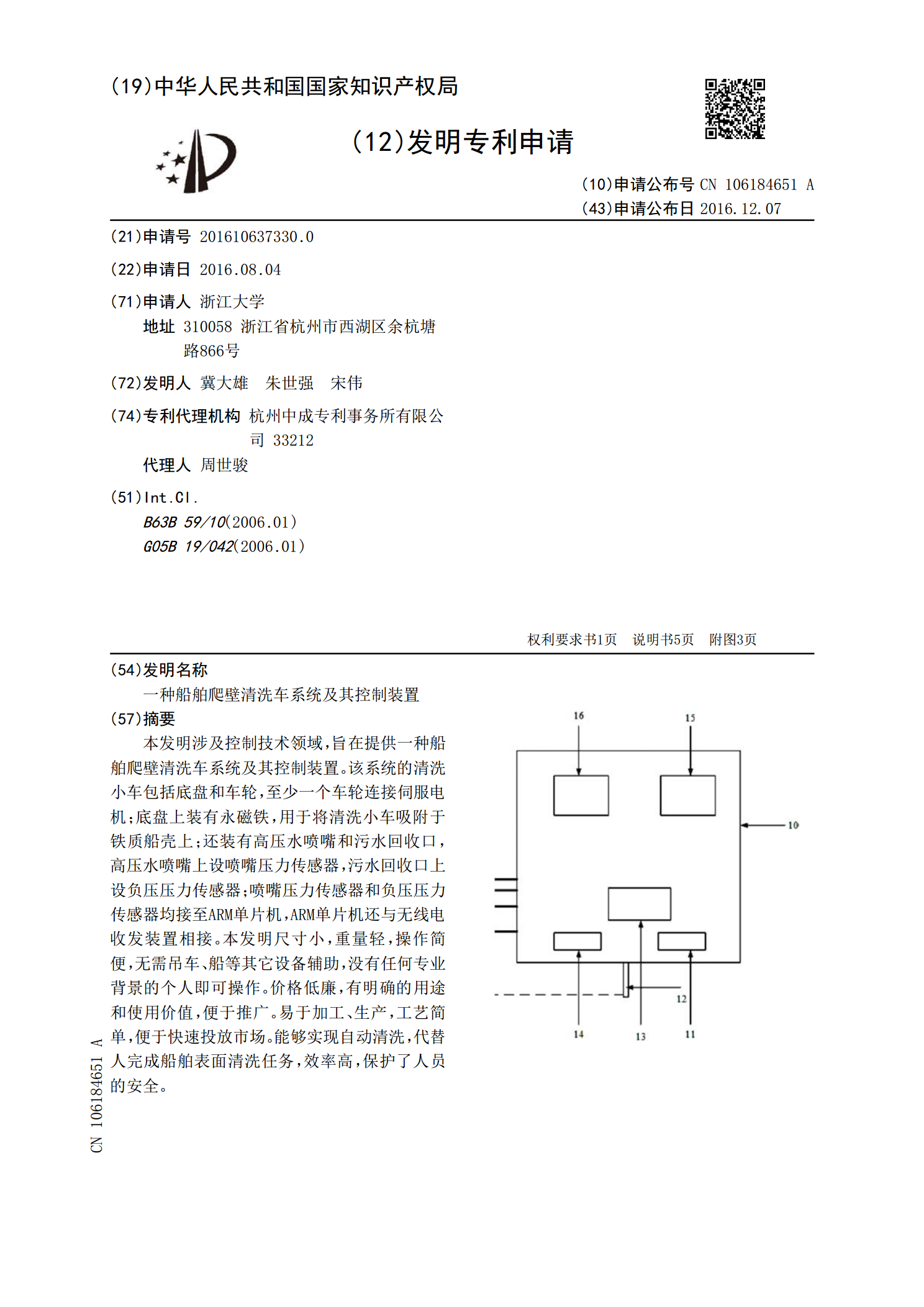
本发明涉及控制技术领域,旨在提供一种船舶爬壁清洗车系统及其控制装置。该系统的清洗小车包括底盘和车轮,至少一个车轮连接伺服电机;底盘上装有永磁铁,用于将清洗小车吸附于铁质船壳上;还装有高压水喷嘴和污水回收口,高压水喷嘴上设喷嘴压力传感器,污水回收口上设负压压力传感器;喷嘴压力传感器和负压压力传感器均接至ARM单片机,ARM单片机还与无线电收发装置相接。本发明尺寸小,重量轻,操作简便,无需吊车、船等其它设备辅助,没有任何专业背景的个人即可操作。价格低廉,有明确的用途和使用价值,便于推广。易于加工、生产,工艺简

一种舱室及船舶.pdf
本发明涉及船舶建造技术领域,尤其涉及一种舱室及船舶。舱室包括门孔、吊孔、吊梁、主门板和副门板,舱室的壁板上开设有上下设置且相连通的吊孔与门孔。吊梁穿过吊孔并铺设于多个舱室的内顶壁上。主门板转动设置于壁板上并能够打开或密封关闭门孔。副门板上开设有与吊梁相适配的避让槽,副门板转动设置于壁板上并能够打开或密封关闭吊孔。船舶包括上述的舱室,可将设备吊运至各个舱室内,无需换乘,简化了吊运过程,提高了吊运效率。由于无需在每个舱室内均放置小车,降低了成本,增大了舱室的内部空间利用率。而且,通过主门板与副门板实现了舱室的
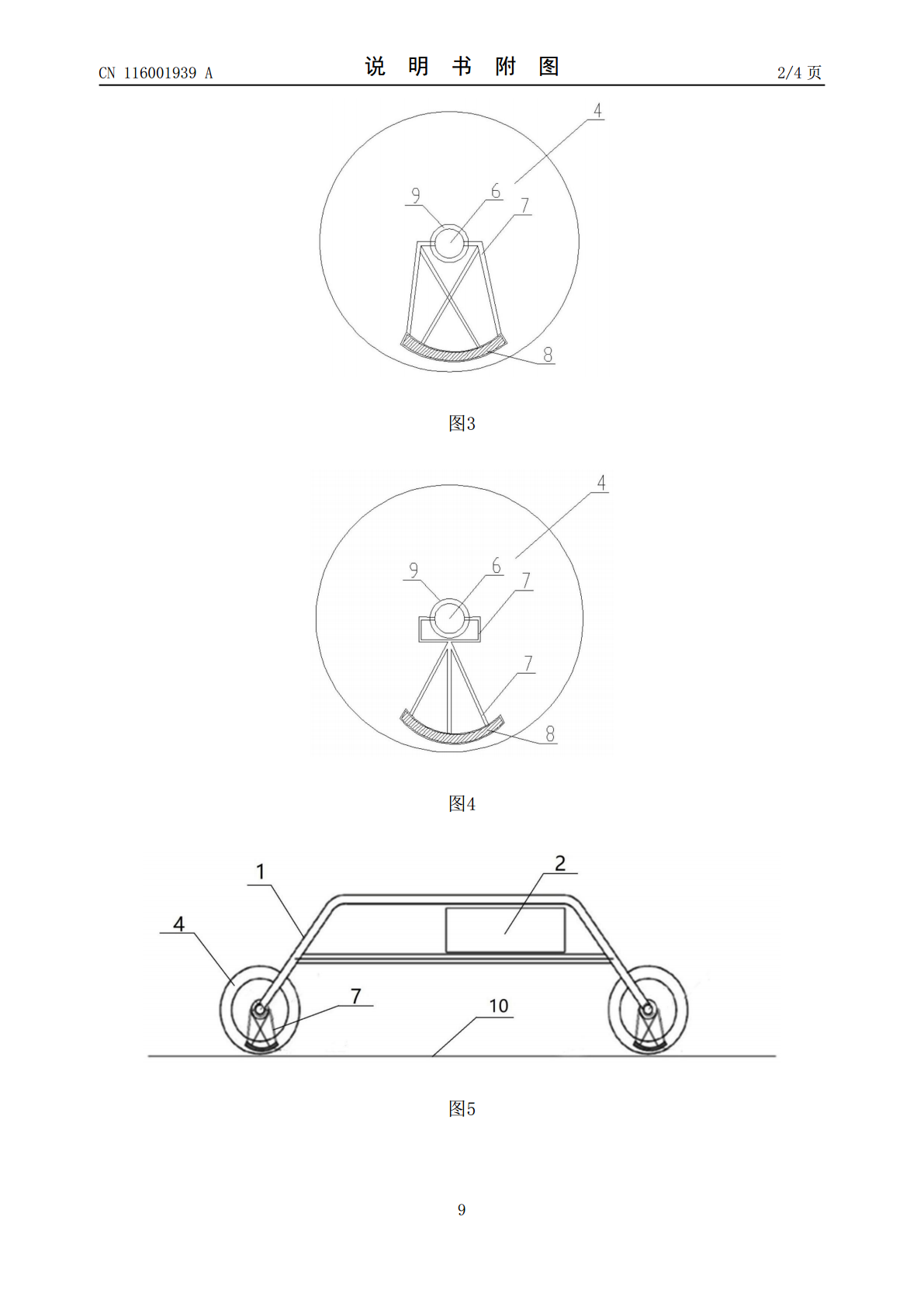
一种基于高压水射流的船舶除锈自动爬壁机器人装置.pdf
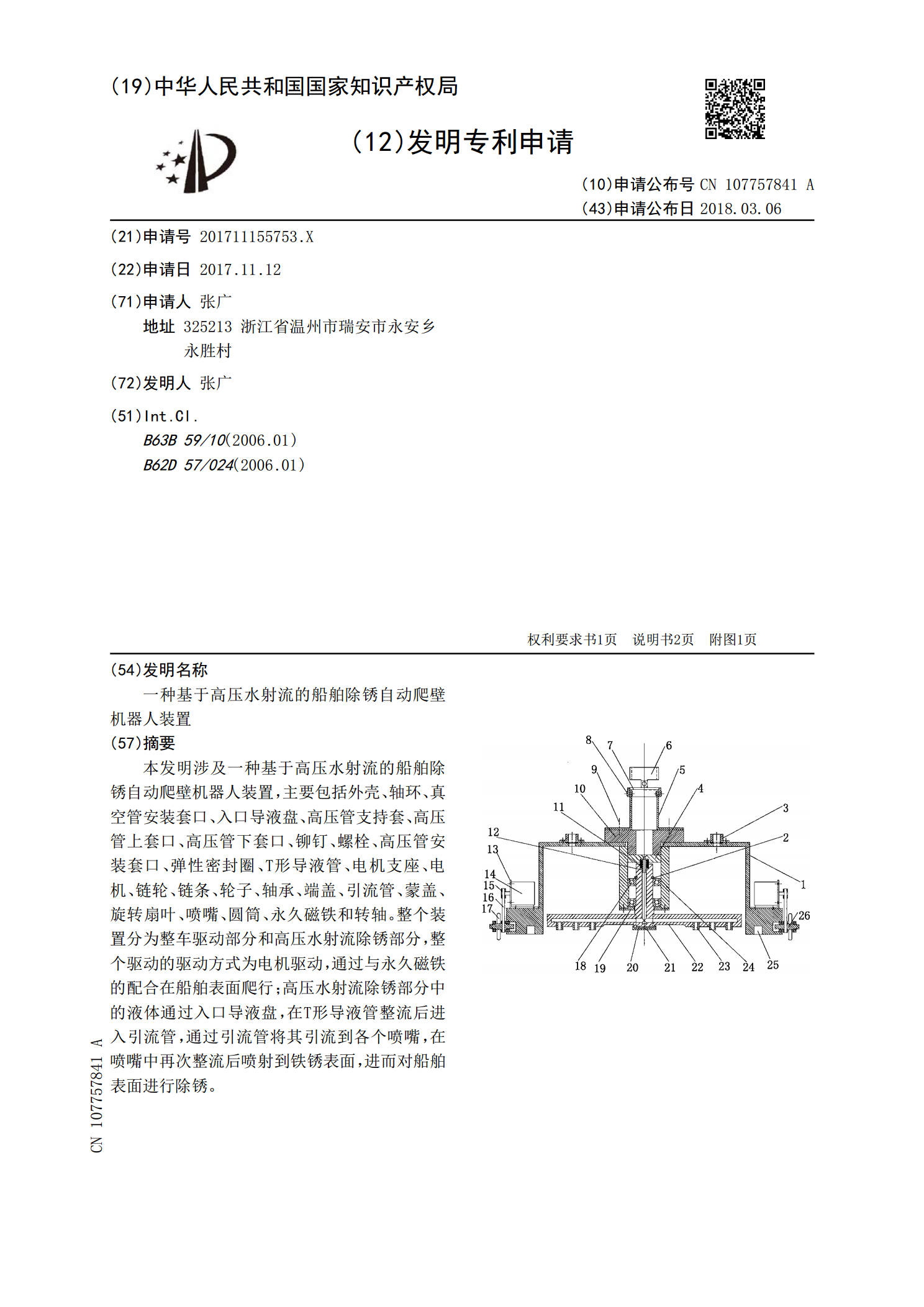
本发明涉及一种基于高压水射流的船舶除锈自动爬壁机器人装置,主要包括外壳、轴环、真空管安装套口、入口导液盘、高压管支持套、高压管上套口、高压管下套口、铆钉、螺栓、高压管安装套口、弹性密封圈、T形导液管、电机支座、电机、链轮、链条、轮子、轴承、端盖、引流管、蒙盖、旋转扇叶、喷嘴、圆筒、永久磁铁和转轴。整个装置分为整车驱动部分和高压水射流除锈部分,整个驱动的驱动方式为电机驱动,通过与永久磁铁的配合在船舶表面爬行;高压水射流除锈部分中的液体通过入口导液盘,在T形导液管整流后进入引流管,通过引流管将其引流到各个喷嘴

一种矿井垂直爬壁装置.pdf
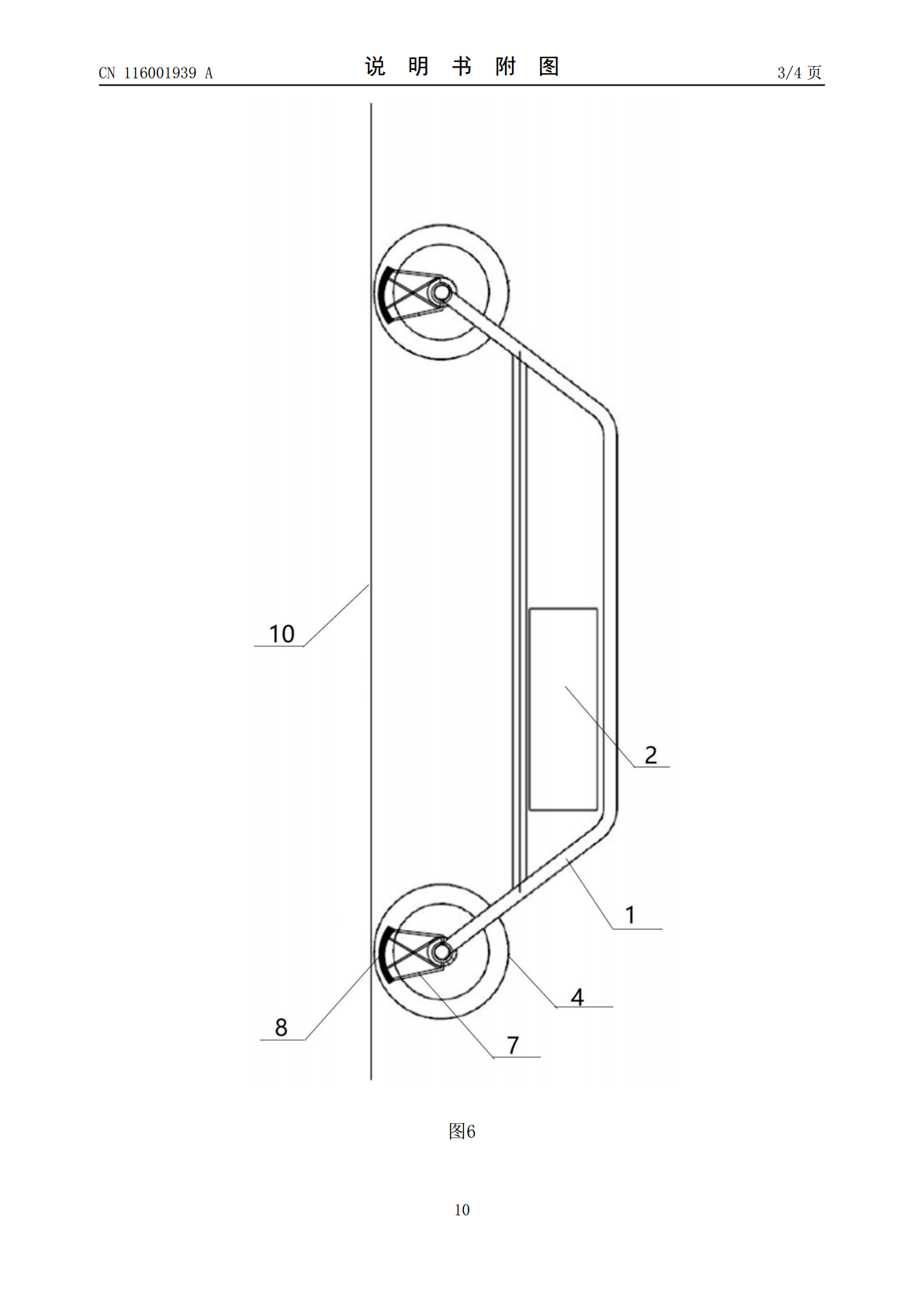
一种矿井垂直爬壁装置,包括爬壁机构部分和导向机构部分,爬壁机构部分包括横向推力液压缸、斜向推力液压缸、爬壁脚掌、第一支座及第二支座,第一、第二支座固装在井筒的上层盘下表面,横向推力液压缸的缸筒端部与第一支座相铰接,横向推力液压缸的活塞杆端部铰接在斜向推力液压缸的缸筒中部,斜向推力液压缸的缸筒端部与第二支座相铰接,爬壁脚掌铰接在斜向推力液压缸的活塞杆端部,爬壁脚掌的脚掌面与矿井井壁相对应;导向机构部分包括导向轮及导向轮轮架,导向轮安装在导向轮轮架一端,导向轮轮架另一端固定连接在井筒的下层盘上表面。本发明能够