
钢结构自动行走挂载机器人及其行走方法.pdf

努力****甲寅

1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

钢结构自动行走挂载机器人及其行走方法.pdf
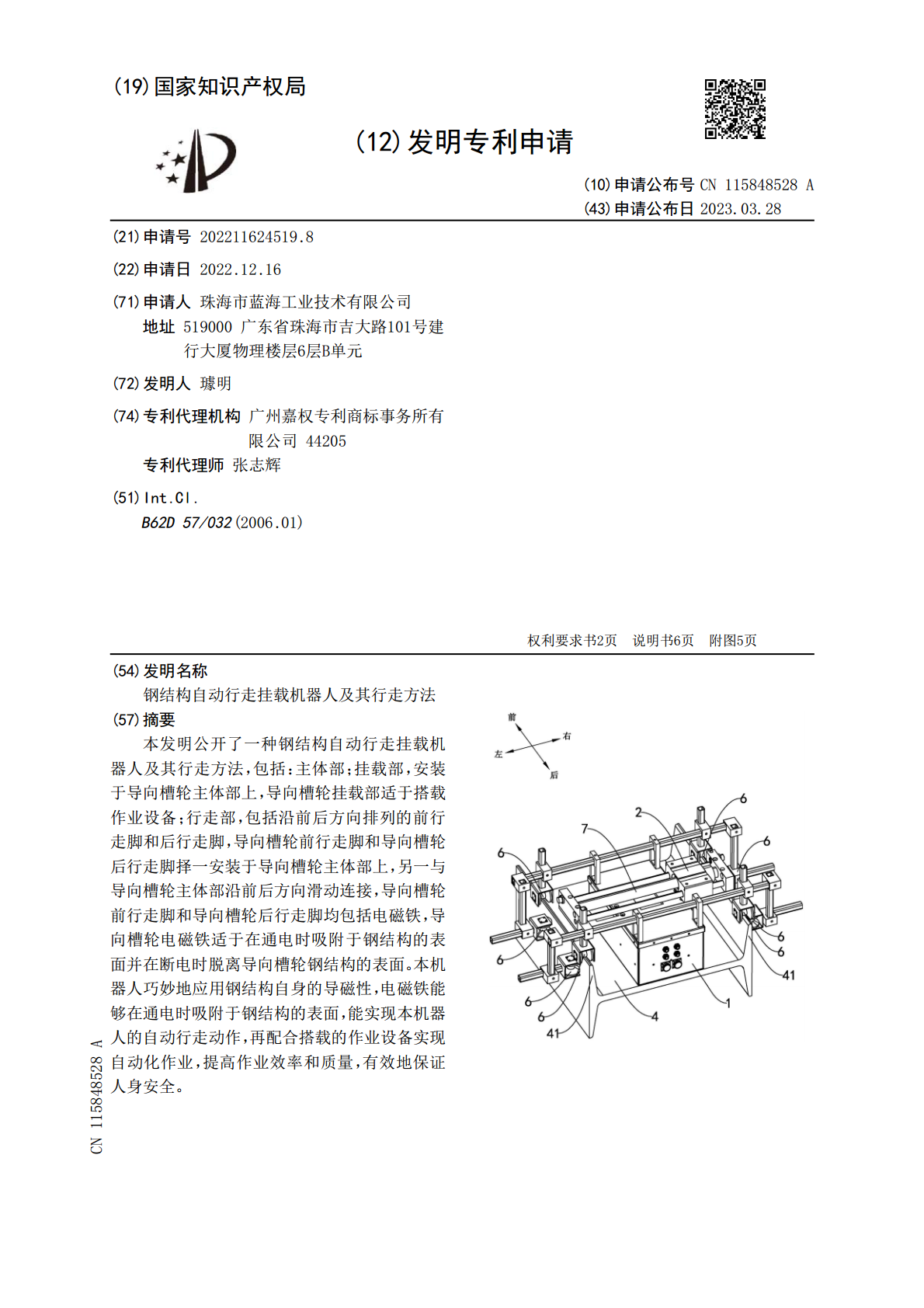
本发明公开了一种钢结构自动行走挂载机器人及其行走方法,包括:主体部;挂载部,安装于导向槽轮主体部上,导向槽轮挂载部适于搭载作业设备;行走部,包括沿前后方向排列的前行走脚和后行走脚,导向槽轮前行走脚和导向槽轮后行走脚择一安装于导向槽轮主体部上,另一与导向槽轮主体部沿前后方向滑动连接,导向槽轮前行走脚和导向槽轮后行走脚均包括电磁铁,导向槽轮电磁铁适于在通电时吸附于钢结构的表面并在断电时脱离导向槽轮钢结构的表面。本机器人巧妙地应用钢结构自身的导磁性,电磁铁能够在通电时吸附于钢结构的表面,能实现本机器人的自动行走

行走机器人及其行走方法.pdf
提供了一种行走机器人及其行走方法。该行走机器人包括行走齿轮、第一齿条、第二齿条以及多个夹爪。第一齿条与行走齿轮啮合,沿行走机器人的行走方向延伸。第二齿条与行走齿轮啮合,与第一齿条平行。在行走齿轮转动的过程中第一齿条和第二齿条能够沿着行走方向朝向相反侧运动。夹爪用于夹持或松开目标对象。多个夹爪中的一个夹爪与第一齿条固定,多个夹爪中的另一个夹爪与第二齿条固定。这样,行走机器人能够具有较短的行走时间,并且具有较高的驱动效率和稳定性。
跟步行走机器人及其自主行走方法.pdf
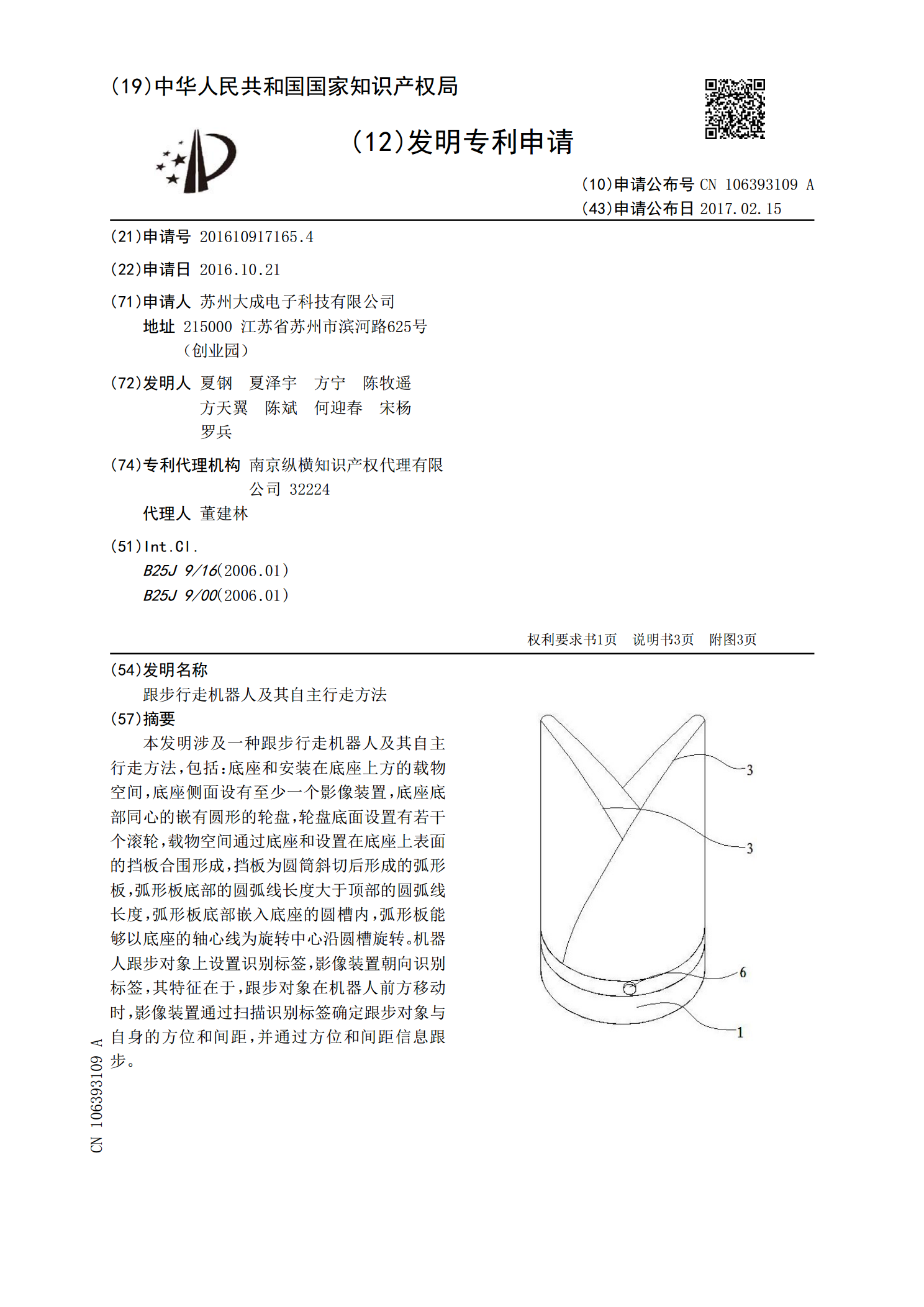
本发明涉及一种跟步行走机器人及其自主行走方法,包括:底座和安装在底座上方的载物空间,底座侧面设有至少一个影像装置,底座底部同心的嵌有圆形的轮盘,轮盘底面设置有若干个滚轮,载物空间通过底座和设置在底座上表面的挡板合围形成,挡板为圆筒斜切后形成的弧形板,弧形板底部的圆弧线长度大于顶部的圆弧线长度,弧形板底部嵌入底座的圆槽内,弧形板能够以底座的轴心线为旋转中心沿圆槽旋转。机器人跟步对象上设置识别标签,影像装置朝向识别标签,其特征在于,跟步对象在机器人前方移动时,影像装置通过扫描识别标签确定跟步对象与自身的方位和

自动行走机器人.pdf
本发明揭示了一种自动行走机器人,用于在地面上自动行走和工作,包括:机体,安装于机体的行走模块以及与行走模块连接的控制模块,行走模块包括安装在机体上的行走轮组和驱动行走轮组的行走马达,沿着自动行走机器人的行进方向,行走轮组包括设置在前的两个前轮以及相对的两个后轮,每个行走轮具有与该行走轮相对固定的轮轴,位于同一侧的前轮和后轮设置为同步转动,在两个行走轮之间接触地面的高度不同时,至少一个行走轮和其轮轴相对于机体的位置发生改变,以使机体保持在趋近于水平位置的平衡状态。本发明的自动行走机器人,其行走轮可以根据地面

自动行走机器人.pdf
本发明揭示了一种自动行走机器人,用于在地面上自动行走和工作,包括:机体,安装于机体的行走模块以及与行走模块连接的控制模块,行走模块包括安装在机体上的行走轮组和驱动行走轮组的行走马达,沿着自动行走机器人的行进方向,行走轮组包括设置在前的两个前轮以及相对的两个后轮,每个行走轮具有与该行走轮相对固定的轮轴,位于同一侧的前轮和后轮设置为同步转动,每个行走轮的轮轴与机体之间均设置检测传感器,当至少两个行走轮离开地面时,至少两个检测传感器与机体相抵从而触发检测信号并反馈给控制模块,控制模块根据接收到的检测信号进行相应