
一种机器人关节模组.pdf

是你****深呀


1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机器人关节模组.pdf
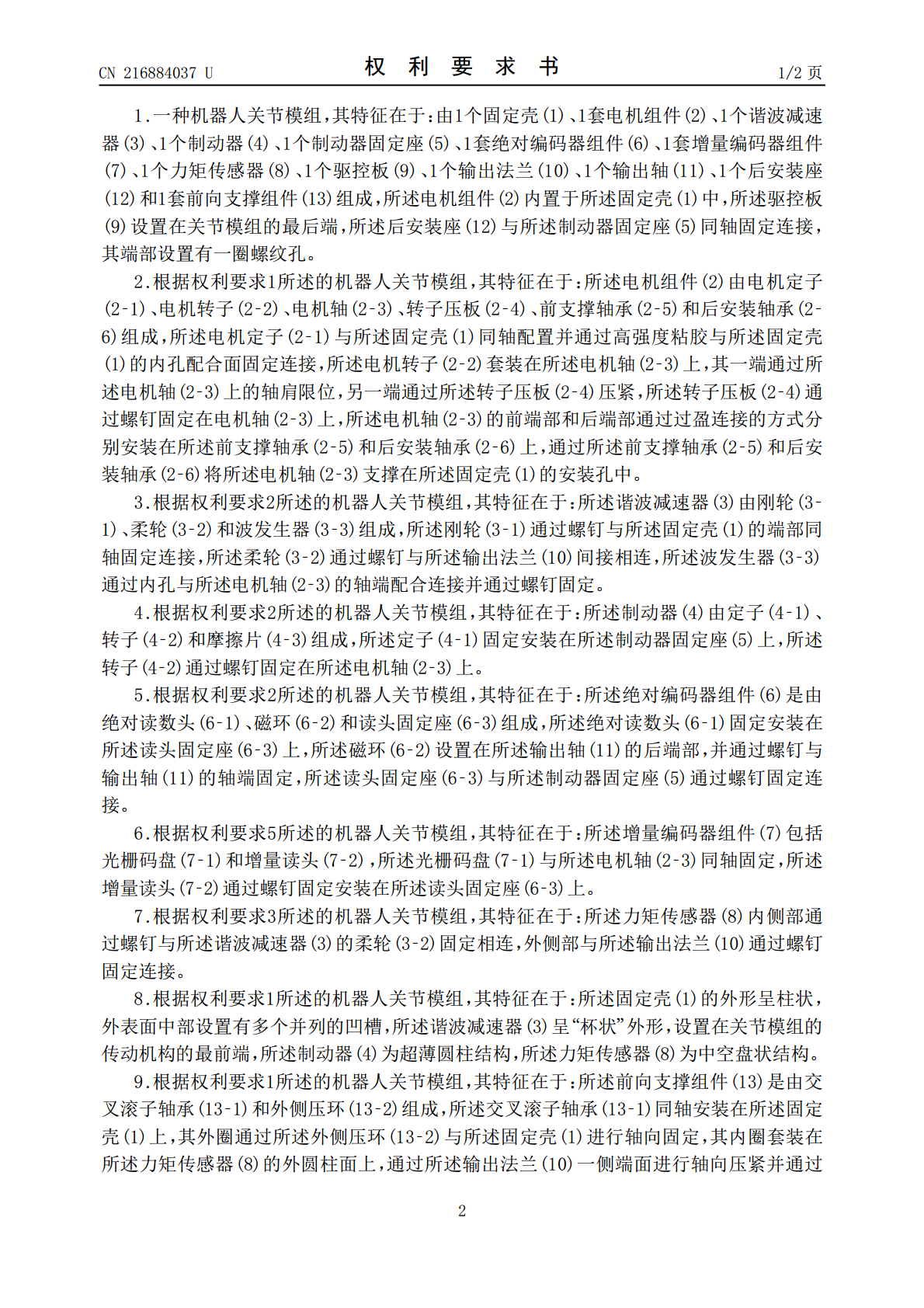
本实用新型公开了一种机器人关节模组,包括由1个固定壳、1套电机组件、1个谐波减速器、1个制动器、1个制动器固定座、1套绝对编码器组件、1套增量编码器组件、1个力矩传感器、1个驱控板、1个输出法兰、1个输出轴、1个后安装座和1套前向支撑组件组成。该机器人关节模组中,该关节模组体积小、结构紧凑、空间利用率高,组成部件在拆装时也较为方便,此外,通过在关节模组的输出端集成关节扭矩传感器,大大提高了碰撞检测时的灵敏度,关节模组集成了无励磁制动器,制动器动作反应快、无空回程,可以在关节模组突然失电时将电机轴立即抱紧,
机器人及关节模组.pdf
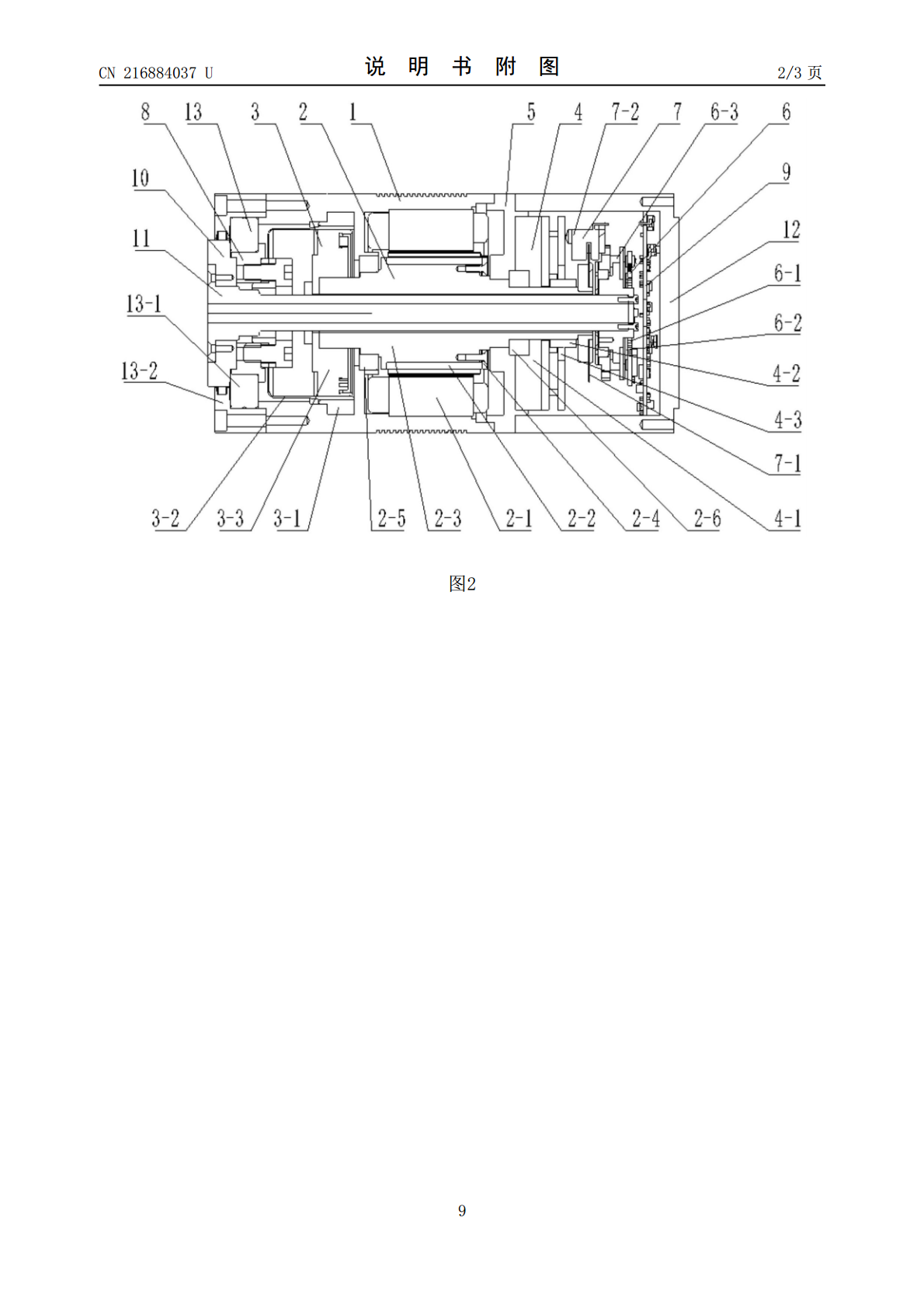
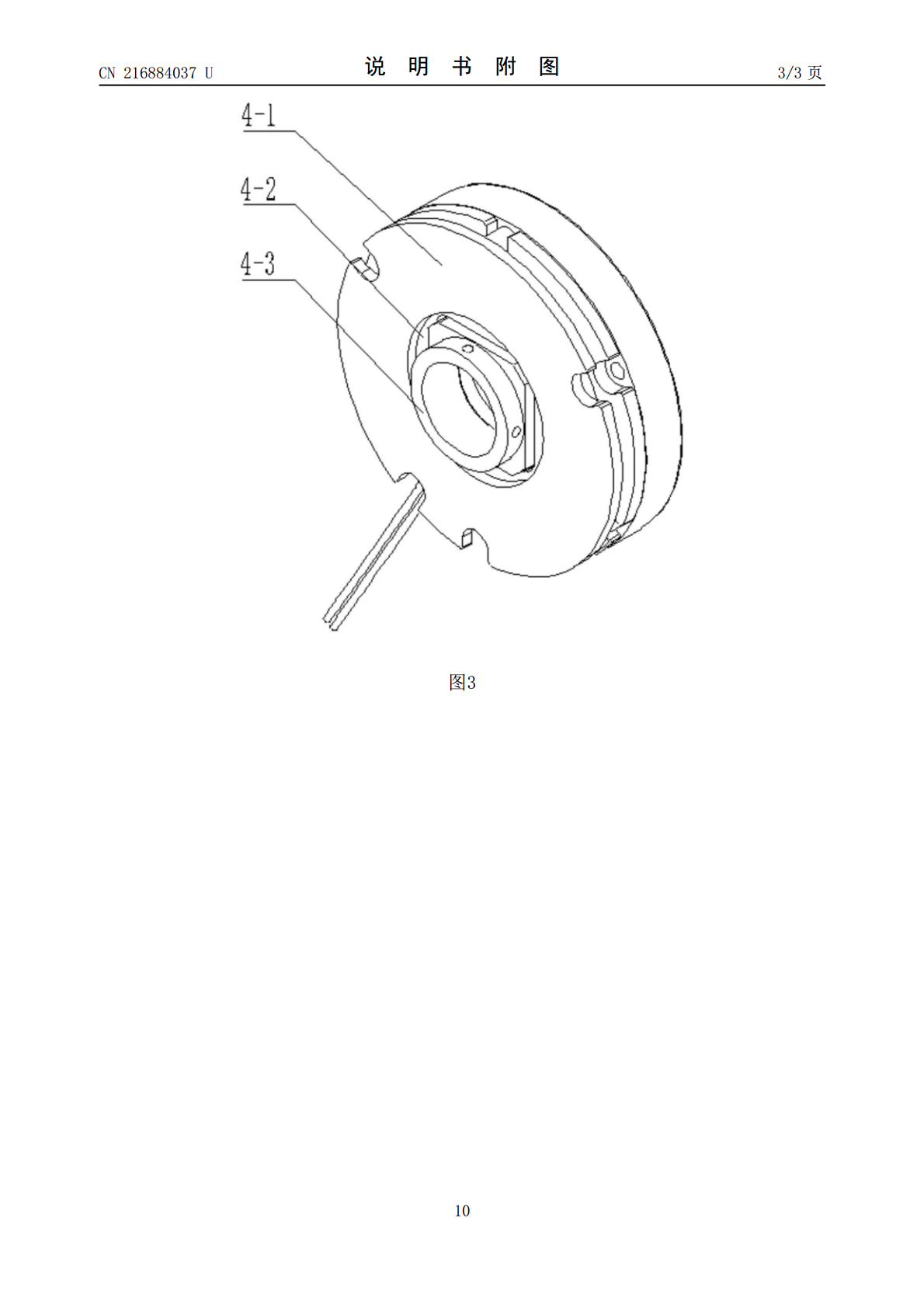
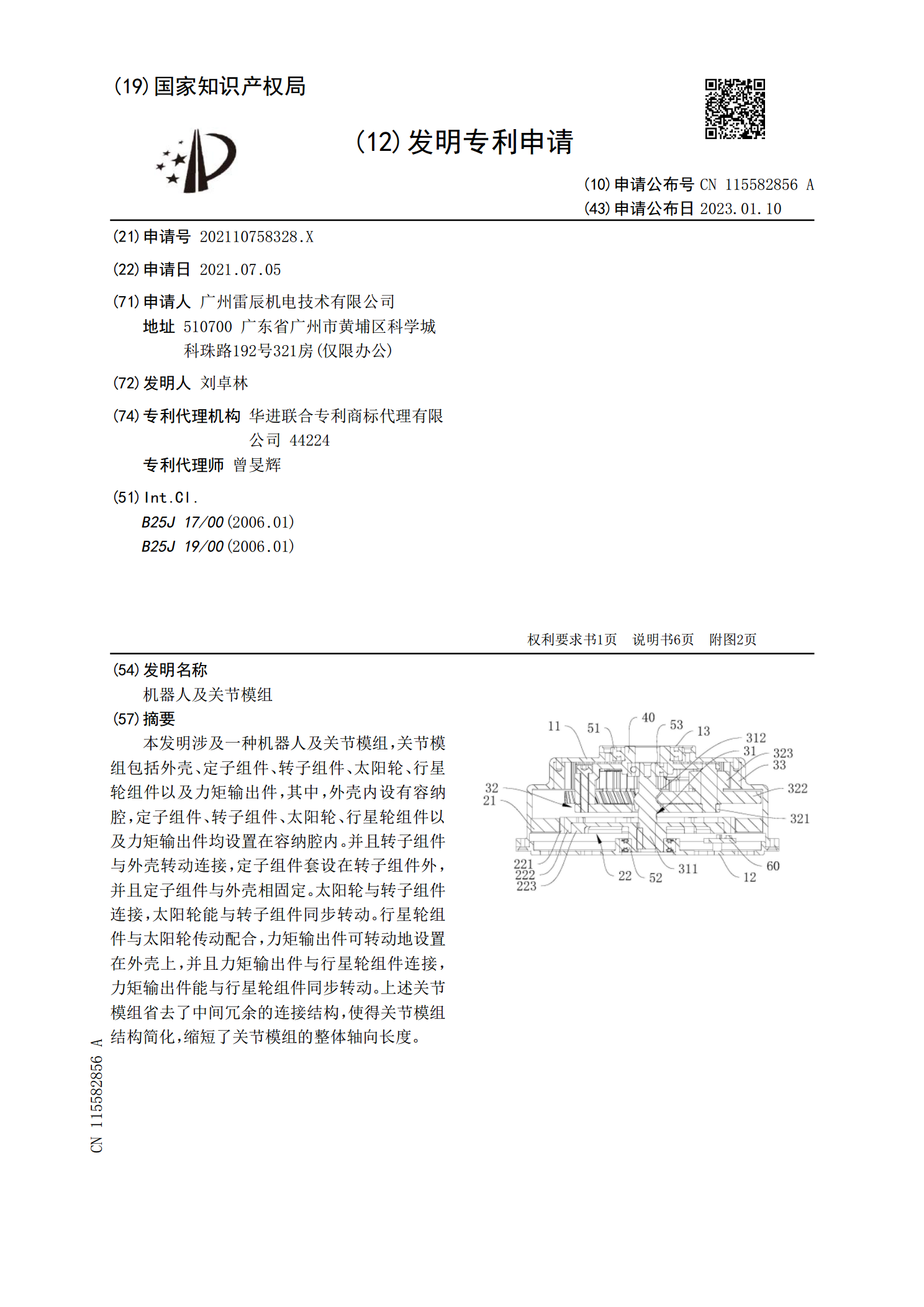
本发明涉及一种机器人及关节模组,关节模组包括外壳、定子组件、转子组件、太阳轮、行星轮组件以及力矩输出件,其中,外壳内设有容纳腔,定子组件、转子组件、太阳轮、行星轮组件以及力矩输出件均设置在容纳腔内。并且转子组件与外壳转动连接,定子组件套设在转子组件外,并且定子组件与外壳相固定。太阳轮与转子组件连接,太阳轮能与转子组件同步转动。行星轮组件与太阳轮传动配合,力矩输出件可转动地设置在外壳上,并且力矩输出件与行星轮组件连接,力矩输出件能与行星轮组件同步转动。上述关节模组省去了中间冗余的连接结构,使得关节模组结构简

关节模组及协作机器人.pdf
本发明涉及自动控制技术领域,特别是涉及一种关节模组及协作机器人。关节模组包括关节驱动件、编码器和送风件。关节驱动件包括驱动定子和驱动转子,驱动定子构造有与外部环境连通的出风口。编码器连接于驱动转子,送风件与编码器沿驱动转子的轴向间隔。编码器、送风机和驱动定子之间形成流动通道,以形成在送风件的作用下灰尘能够依次经过的流动路径,经过流动路径的灰尘经过出风口排出。当送风件运行时,送风件送出的气流能够将流动通道内的灰尘例如制动器摩擦产生的灰尘,经出风口排出到关节模组外部。通过将关节模组内部的灰尘吹出,保持编码器所

一种具有防腐功能的机器人关节模组.pdf
本实用新型涉及机器人技术领域,公开了一种具有防腐功能的机器人关节模组,包括沿同一中心线相对转动的两个部件、第一密封件、定位件以及压缩弹簧;第一密封件设置在两个部件之间;定位件一端与一部件固定连接,另一端与第一密封件沿定位件的延伸方向活动连接,与定位件固定连接的部件与第一密封件之间沿定位件的延伸方向设置有呈压缩状态的压缩弹簧;本申请提供的一种具有防腐功能的机器人关节模组,既有效提高了密封性能,进而实现了防腐,同时使密封部位结构简单、安装方便,提高了经济效益。

机器人的关节单元、关节模组以及具有其的足式机器人.pdf
本发明公开了一种机器人的关节单元、关节模组以及具有其的足式机器人,关节单元包括:壳体、电机组件、传动机构、减速机构,电机组件的定子与壳体固定连接,转子与定子同轴设置且转子可转动地连接于壳体;传动机构包括主动件和从动件,主动件与转子连接;减速机构为行星轮系,行星架上形成有输出轴;其中,输出轴的旋转中心与转子的旋转中心彼此平行且间隔开。由此,关节单元采用电机组件与减速机构非同心的设计,降低了关节的厚度,结构更为紧凑;增加一道调速工序,增大传动比。关节模组采用多个并列设置的关节单元,具有多个自由度,多个关节单元