
一种基于伪图像的点云与图像融合三维目标检测方法.pdf

康平****ng


1/8
2/8

3/8

4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于伪图像的点云与图像融合三维目标检测方法.pdf
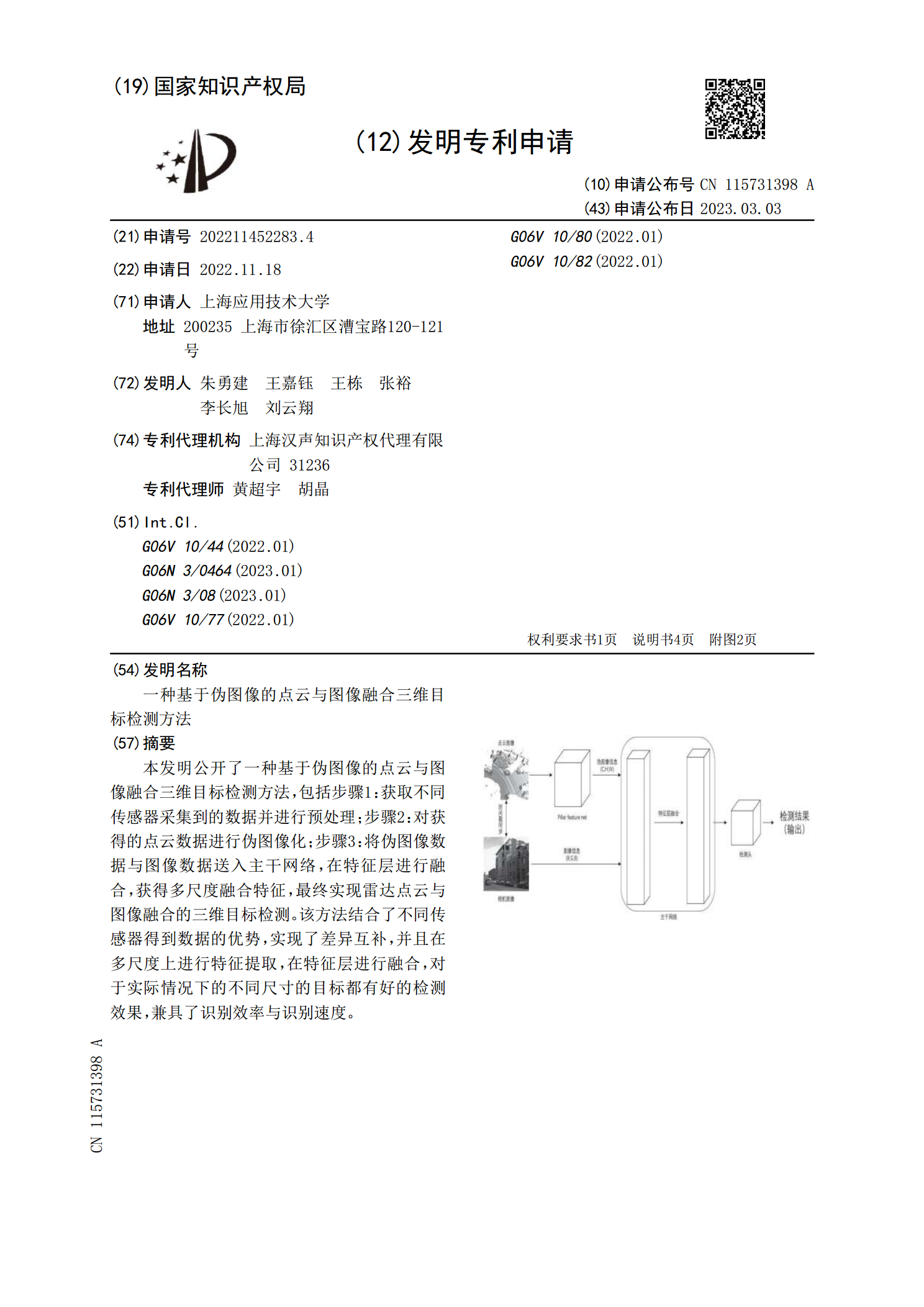
本发明公开了一种基于伪图像的点云与图像融合三维目标检测方法,包括步骤1:获取不同传感器采集到的数据并进行预处理;步骤2:对获得的点云数据进行伪图像化;步骤3:将伪图像数据与图像数据送入主干网络,在特征层进行融合,获得多尺度融合特征,最终实现雷达点云与图像融合的三维目标检测。该方法结合了不同传感器得到数据的优势,实现了差异互补,并且在多尺度上进行特征提取,在特征层进行融合,对于实际情况下的不同尺寸的目标都有好的检测效果,兼具了识别效率与识别速度。
基于图像与点云融合的多模态三维目标检测方法及装置.pdf
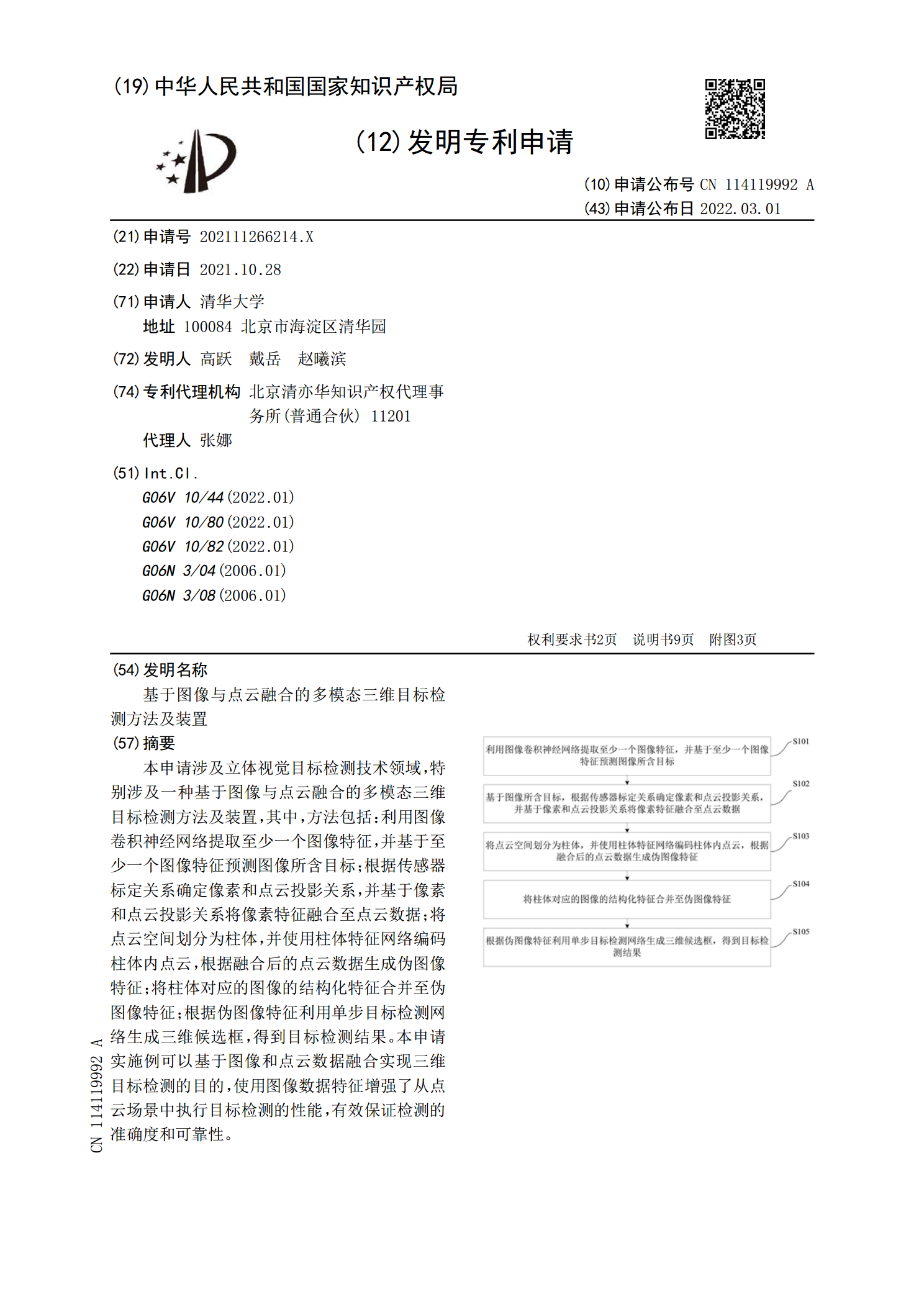
本申请涉及立体视觉目标检测技术领域,特别涉及一种基于图像与点云融合的多模态三维目标检测方法及装置,其中,方法包括:利用图像卷积神经网络提取至少一个图像特征,并基于至少一个图像特征预测图像所含目标;根据传感器标定关系确定像素和点云投影关系,并基于像素和点云投影关系将像素特征融合至点云数据;将点云空间划分为柱体,并使用柱体特征网络编码柱体内点云,根据融合后的点云数据生成伪图像特征;将柱体对应的图像的结构化特征合并至伪图像特征;根据伪图像特征利用单步目标检测网络生成三维候选框,得到目标检测结果。本申请实施例可以

基于交叉注意力机制的图像点云融合三维目标检测方法.pdf
本发明涉及一种基于交叉注意力机制的图像点云融合三维目标检测方法及系统,属于三维目标检测领域。方法包括:对图像进行目标检测及分割处理,得到实例掩码;根据点云图像空间投影关系得到每一个实例掩码内的点云集合;使用DBSCAN聚类算法对每一个点云集合内的点云进行聚类,为前景点集合中的所有点云逐点拼接实例分割结果向量,将经图像特征渲染的点云所占的整个三维空间划分成多个柱体并进行特征拆分和重组,引入交叉注意力机制聚合柱体内每个点的位置特征和图像特征,多个柱体的融合特征构成伪图像特征;使用RPN网络提取并整合伪图像特征
一种基于图像与点云数据融合的三维重建方法.pdf
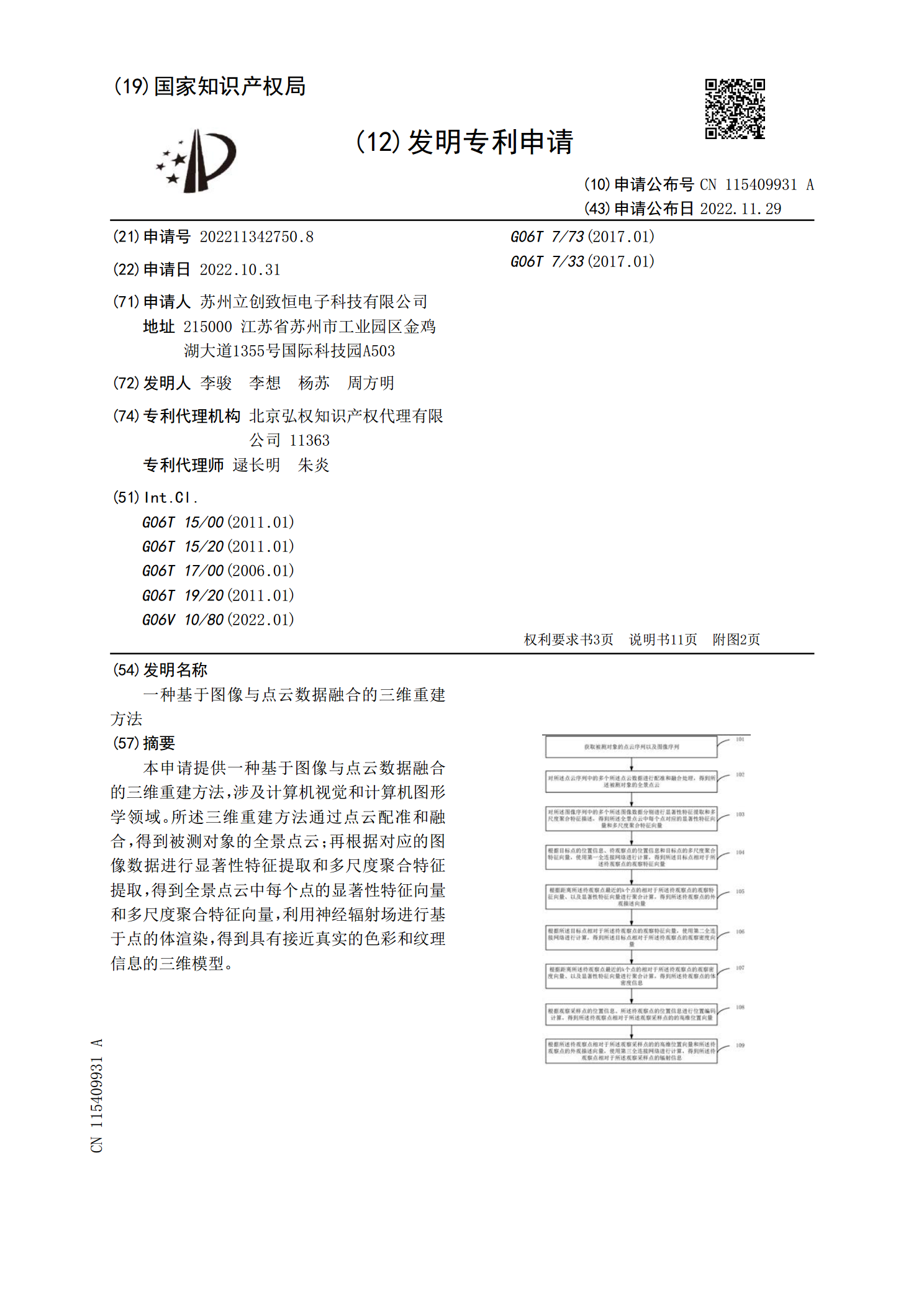
本申请提供一种基于图像与点云数据融合的三维重建方法,涉及计算机视觉和计算机图形学领域。所述三维重建方法通过点云配准和融合,得到被测对象的全景点云;再根据对应的图像数据进行显著性特征提取和多尺度聚合特征提取,得到全景点云中每个点的显著性特征向量和多尺度聚合特征向量,利用神经辐射场进行基于点的体渲染,得到具有接近真实的色彩和纹理信息的三维模型。
一种基于点云数据与图像数据融合的3D目标检测方法.pdf
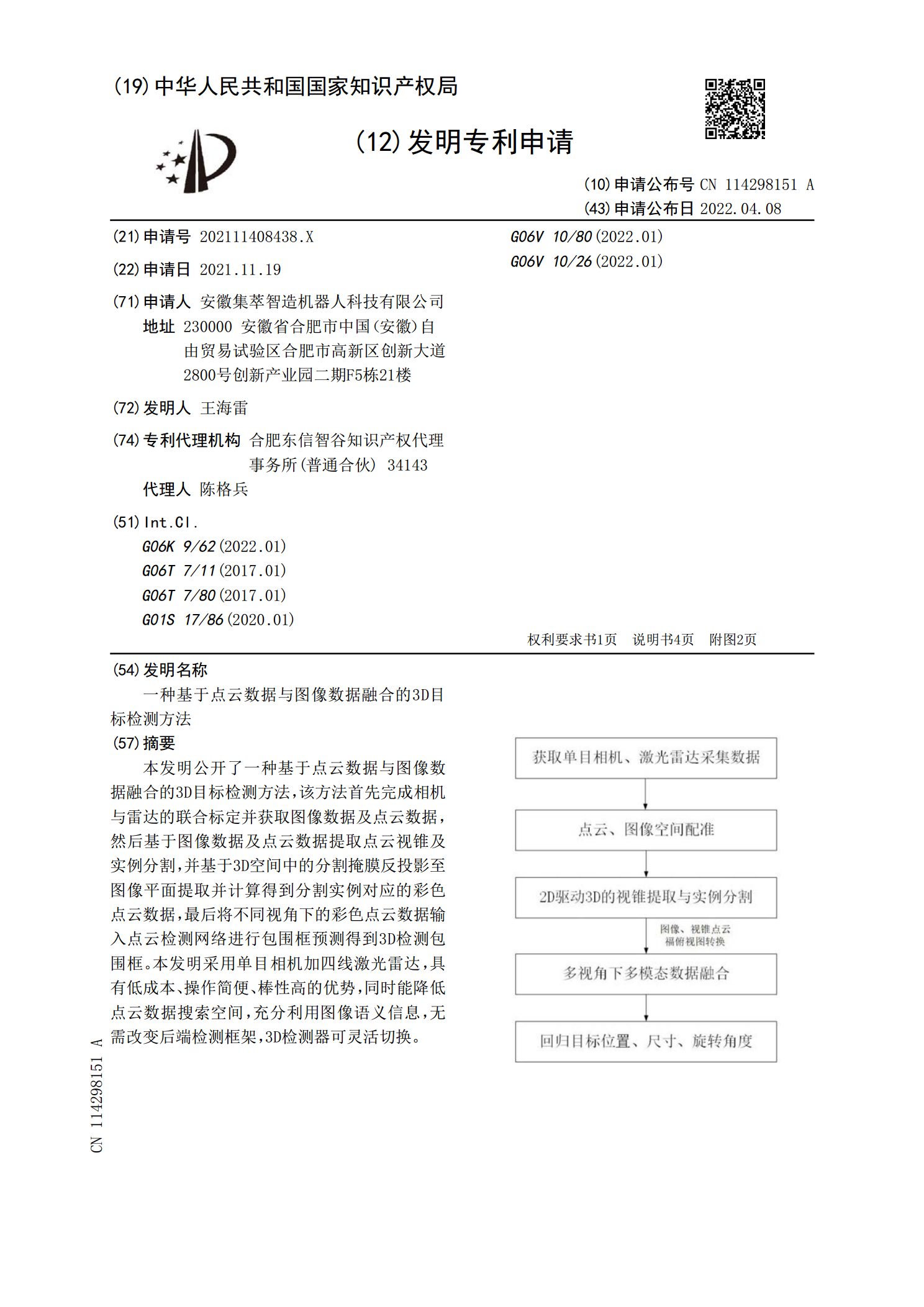
本发明公开了一种基于点云数据与图像数据融合的3D目标检测方法,该方法首先完成相机与雷达的联合标定并获取图像数据及点云数据,然后基于图像数据及点云数据提取点云视锥及实例分割,并基于3D空间中的分割掩膜反投影至图像平面提取并计算得到分割实例对应的彩色点云数据,最后将不同视角下的彩色点云数据输入点云检测网络进行包围框预测得到3D检测包围框。本发明采用单目相机加四线激光雷达,具有低成本、操作简便、棒性高的优势,同时能降低点云数据搜索空间,充分利用图像语义信息,无需改变后端检测框架,3D检测器可灵活切换。