
基于图像与点云融合的多模态三维目标检测方法及装置.pdf

宁馨****找我

1/10
2/10
3/10

4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于图像与点云融合的多模态三维目标检测方法及装置.pdf
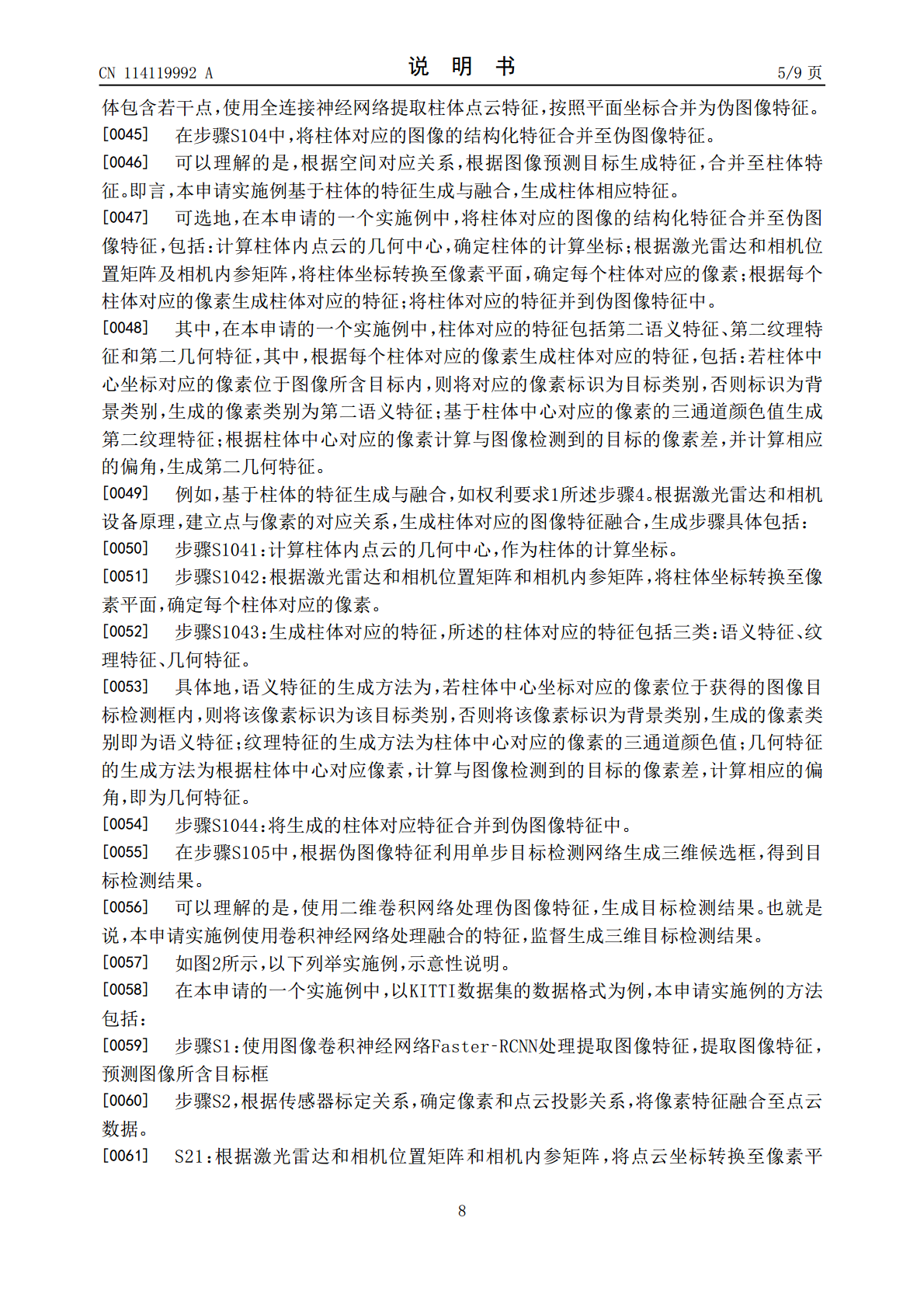
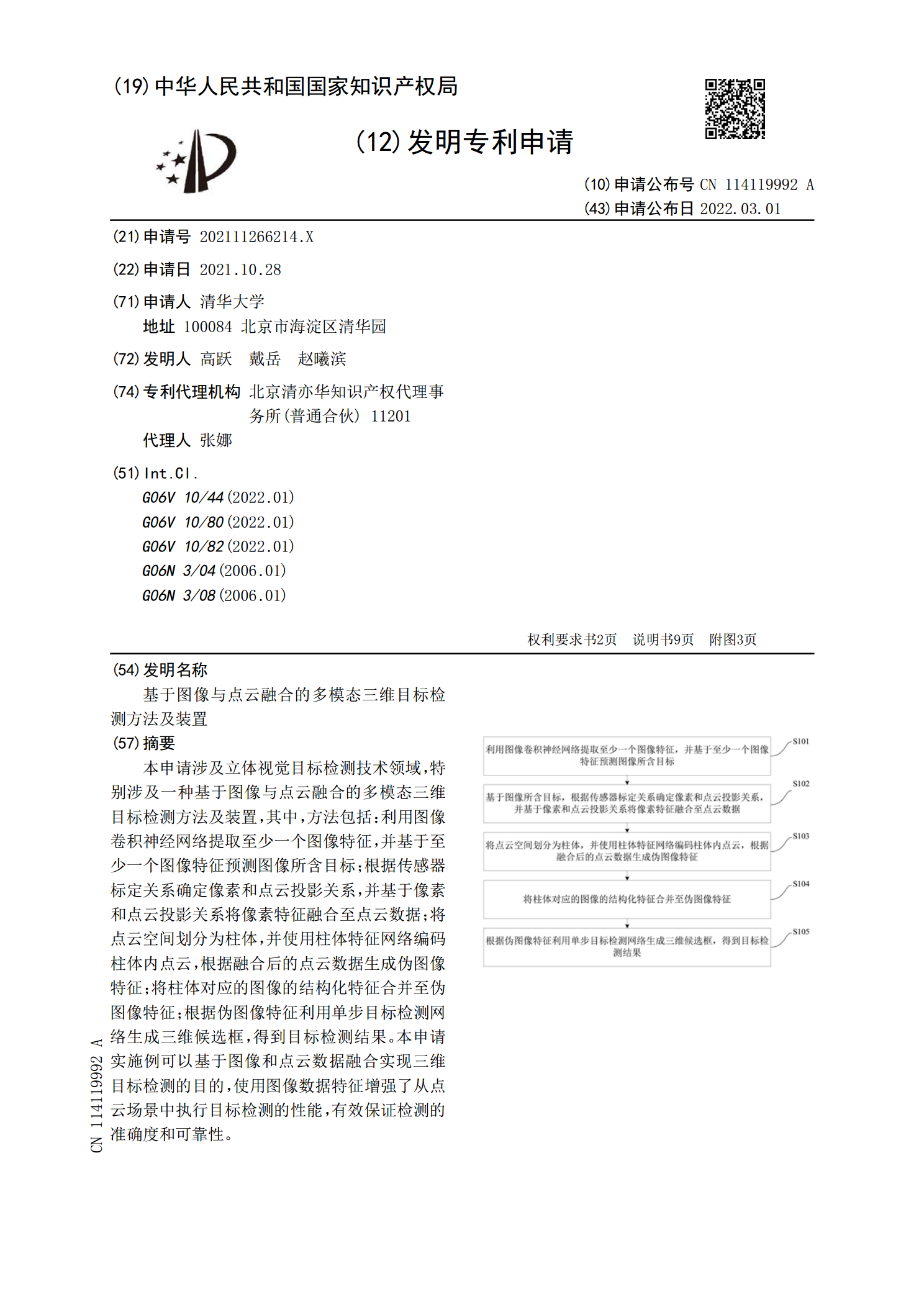
本申请涉及立体视觉目标检测技术领域,特别涉及一种基于图像与点云融合的多模态三维目标检测方法及装置,其中,方法包括:利用图像卷积神经网络提取至少一个图像特征,并基于至少一个图像特征预测图像所含目标;根据传感器标定关系确定像素和点云投影关系,并基于像素和点云投影关系将像素特征融合至点云数据;将点云空间划分为柱体,并使用柱体特征网络编码柱体内点云,根据融合后的点云数据生成伪图像特征;将柱体对应的图像的结构化特征合并至伪图像特征;根据伪图像特征利用单步目标检测网络生成三维候选框,得到目标检测结果。本申请实施例可以

一种基于图像融合的多模态图像目标检测方法.pdf
本发明涉及一种基于图像融合的多模态图像目标检测方法,包括:1)将预先采集好的红外图像及其可见光图像,制作多模态图像数据集;2)将预处理好的成对图像作为融合模型中生成模型G的输入;生成模型G基于U‑Net等全卷积网络,以残差网络为基础的卷积神经网络作为生成网络模型结构,包括收缩过程和扩张过程,收缩路径包括多个卷积加ReLU激活层再加最大池化(MaxPooling)结构,下采样的每一步特征通道数都增加一倍,输出生成的融合图像;融合图像输入融合模型中的判别网络模型;根据训练过程中损失函数的变化,按迭代次数调节

基于三维点云及多模态人脸融合识别研究.pptx
基于三维点云及多模态人脸融合识别研究目录添加章节标题研究背景与意义研究背景研究意义研究内容与方法研究内容研究方法三维点云数据处理与特征提取三维点云数据获取三维点云数据处理三维点云特征提取多模态人脸融合识别技术人脸检测与定位人脸特征提取与匹配多模态人脸融合识别算法实验结果与分析实验设置与数据集实验结果展示结果分析性能评估与对比结论与展望研究结论研究不足与展望THANKYOU
一种基于伪图像的点云与图像融合三维目标检测方法.pdf
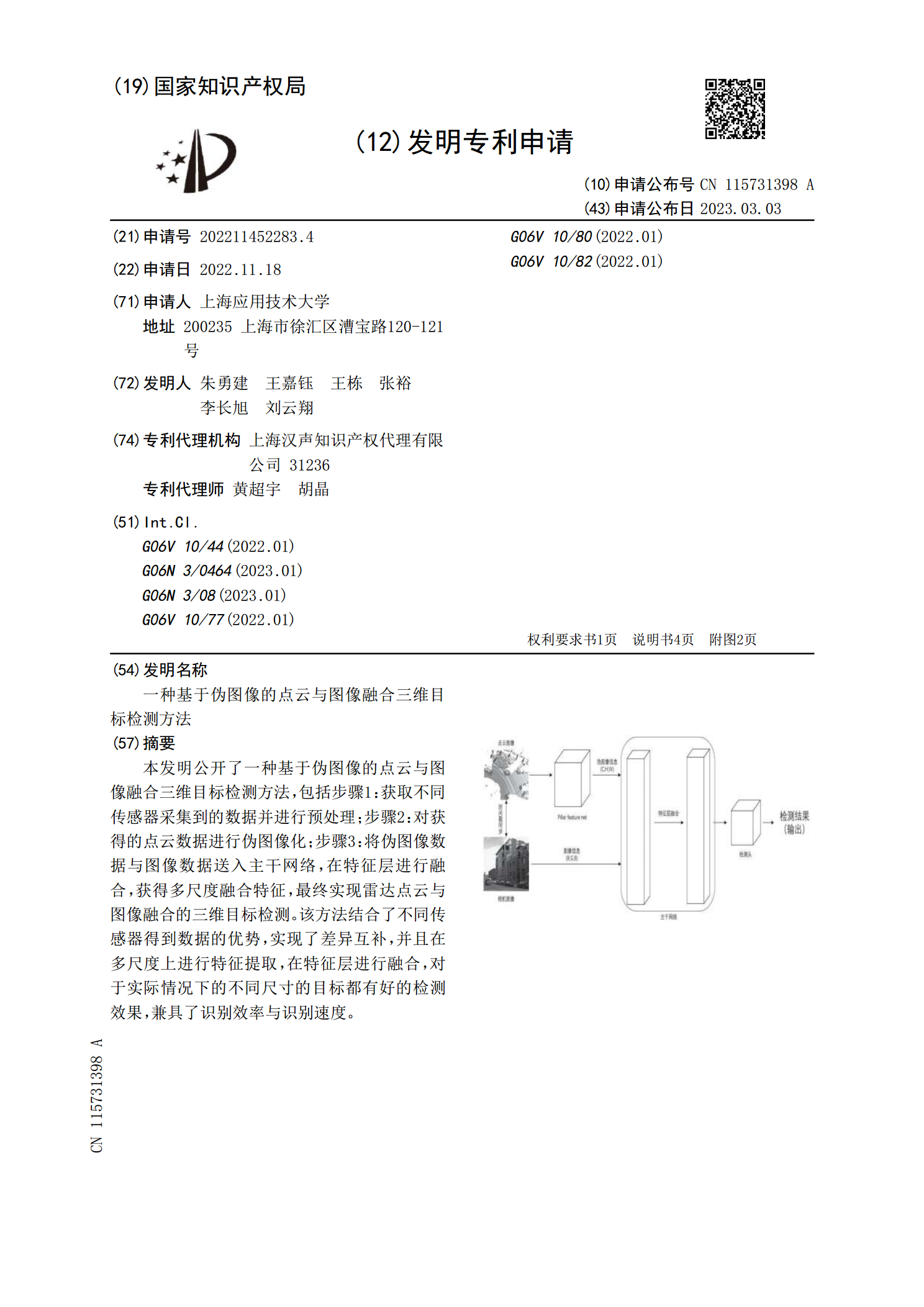
本发明公开了一种基于伪图像的点云与图像融合三维目标检测方法,包括步骤1:获取不同传感器采集到的数据并进行预处理;步骤2:对获得的点云数据进行伪图像化;步骤3:将伪图像数据与图像数据送入主干网络,在特征层进行融合,获得多尺度融合特征,最终实现雷达点云与图像融合的三维目标检测。该方法结合了不同传感器得到数据的优势,实现了差异互补,并且在多尺度上进行特征提取,在特征层进行融合,对于实际情况下的不同尺寸的目标都有好的检测效果,兼具了识别效率与识别速度。

基于交叉注意力机制的图像点云融合三维目标检测方法.pdf
本发明涉及一种基于交叉注意力机制的图像点云融合三维目标检测方法及系统,属于三维目标检测领域。方法包括:对图像进行目标检测及分割处理,得到实例掩码;根据点云图像空间投影关系得到每一个实例掩码内的点云集合;使用DBSCAN聚类算法对每一个点云集合内的点云进行聚类,为前景点集合中的所有点云逐点拼接实例分割结果向量,将经图像特征渲染的点云所占的整个三维空间划分成多个柱体并进行特征拆分和重组,引入交叉注意力机制聚合柱体内每个点的位置特征和图像特征,多个柱体的融合特征构成伪图像特征;使用RPN网络提取并整合伪图像特征