
一种基于图像与点云数据融合的三维重建方法.pdf

是你****晨呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于图像与点云数据融合的三维重建方法.pdf
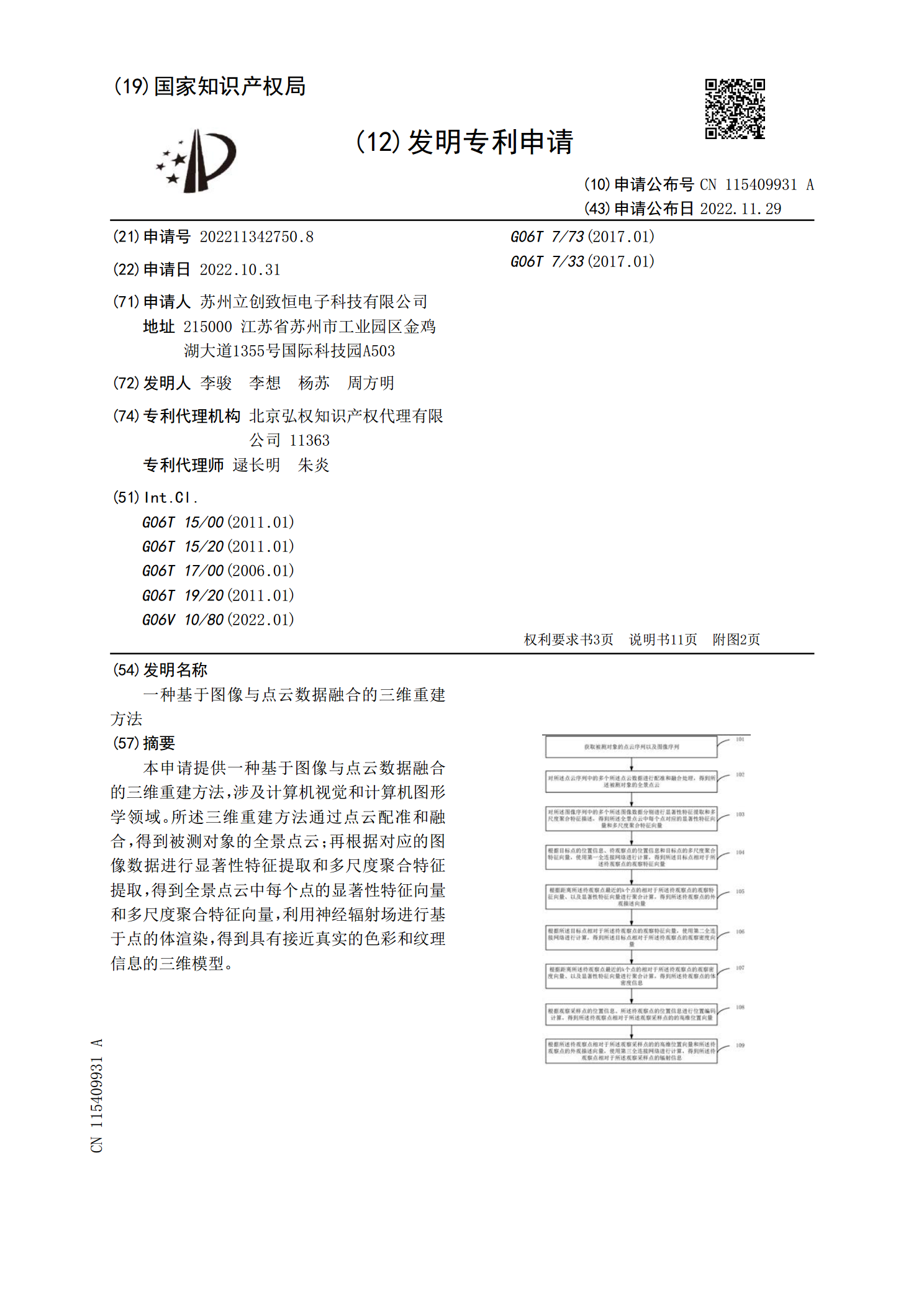
本申请提供一种基于图像与点云数据融合的三维重建方法,涉及计算机视觉和计算机图形学领域。所述三维重建方法通过点云配准和融合,得到被测对象的全景点云;再根据对应的图像数据进行显著性特征提取和多尺度聚合特征提取,得到全景点云中每个点的显著性特征向量和多尺度聚合特征向量,利用神经辐射场进行基于点的体渲染,得到具有接近真实的色彩和纹理信息的三维模型。
一种基于点云数据与图像数据融合的3D目标检测方法.pdf
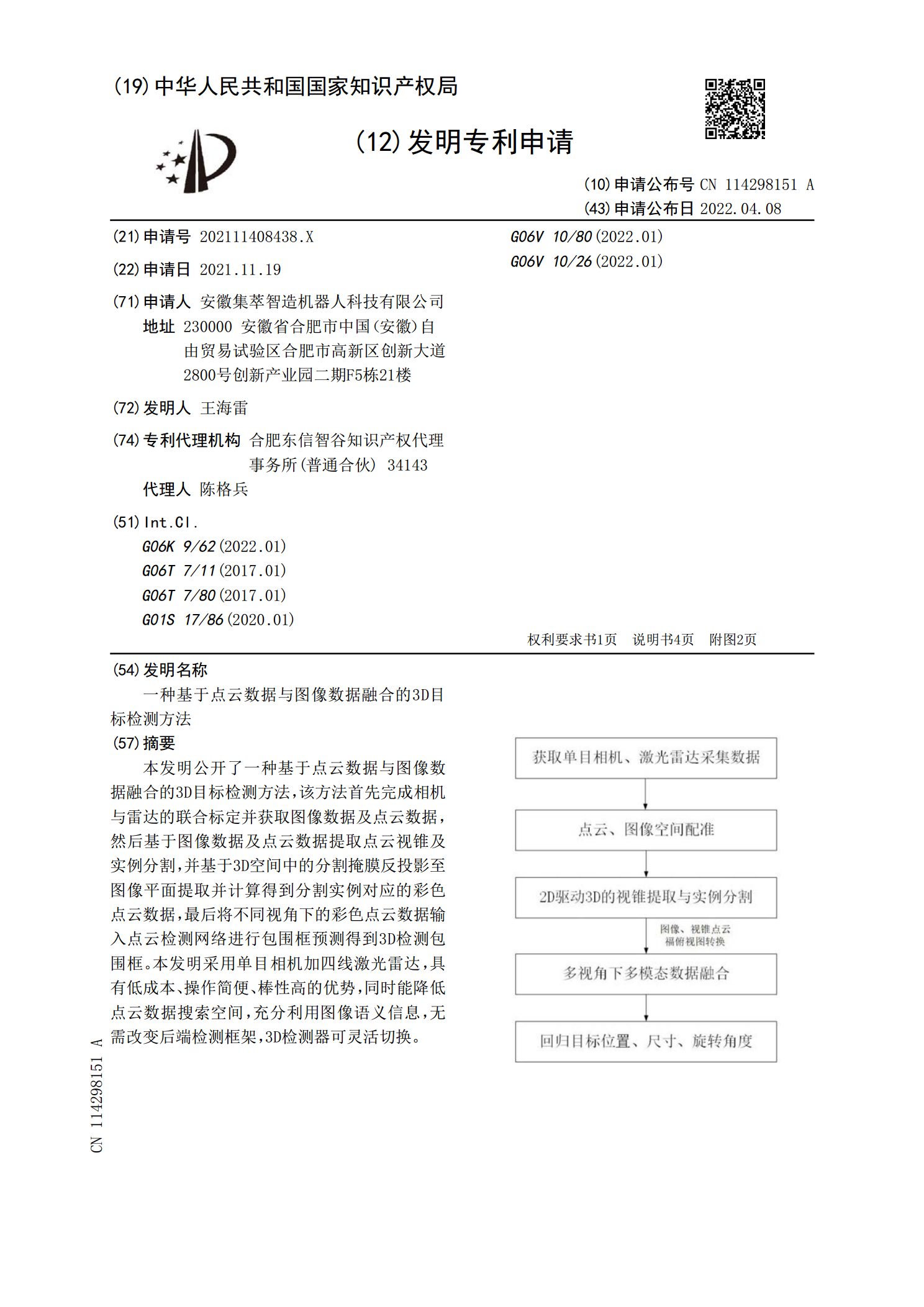
本发明公开了一种基于点云数据与图像数据融合的3D目标检测方法,该方法首先完成相机与雷达的联合标定并获取图像数据及点云数据,然后基于图像数据及点云数据提取点云视锥及实例分割,并基于3D空间中的分割掩膜反投影至图像平面提取并计算得到分割实例对应的彩色点云数据,最后将不同视角下的彩色点云数据输入点云检测网络进行包围框预测得到3D检测包围框。本发明采用单目相机加四线激光雷达,具有低成本、操作简便、棒性高的优势,同时能降低点云数据搜索空间,充分利用图像语义信息,无需改变后端检测框架,3D检测器可灵活切换。
一种基于伪图像的点云与图像融合三维目标检测方法.pdf
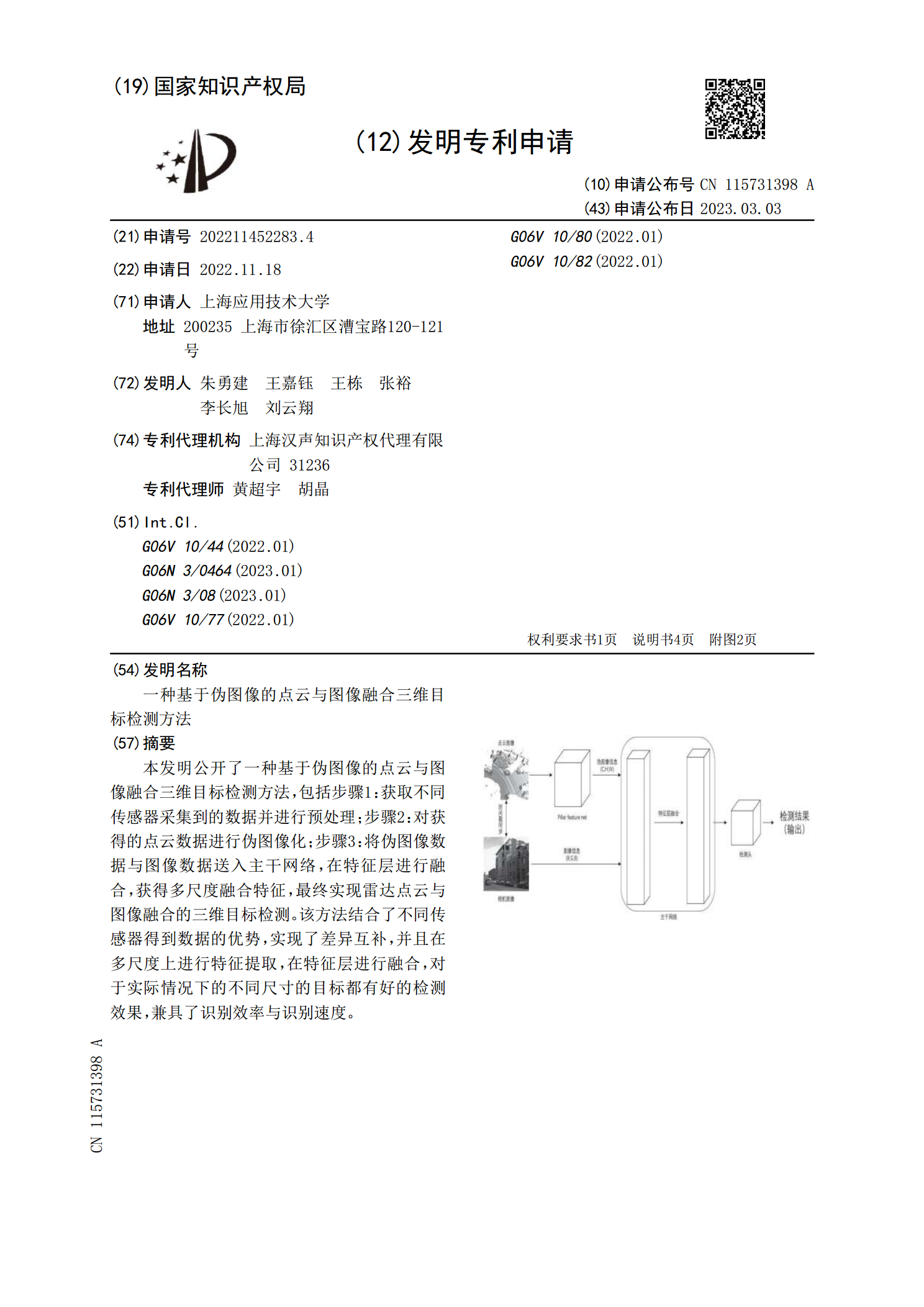
本发明公开了一种基于伪图像的点云与图像融合三维目标检测方法,包括步骤1:获取不同传感器采集到的数据并进行预处理;步骤2:对获得的点云数据进行伪图像化;步骤3:将伪图像数据与图像数据送入主干网络,在特征层进行融合,获得多尺度融合特征,最终实现雷达点云与图像融合的三维目标检测。该方法结合了不同传感器得到数据的优势,实现了差异互补,并且在多尺度上进行特征提取,在特征层进行融合,对于实际情况下的不同尺寸的目标都有好的检测效果,兼具了识别效率与识别速度。
一种机载激光点云数据与车载激光点云数据融合方法.pdf
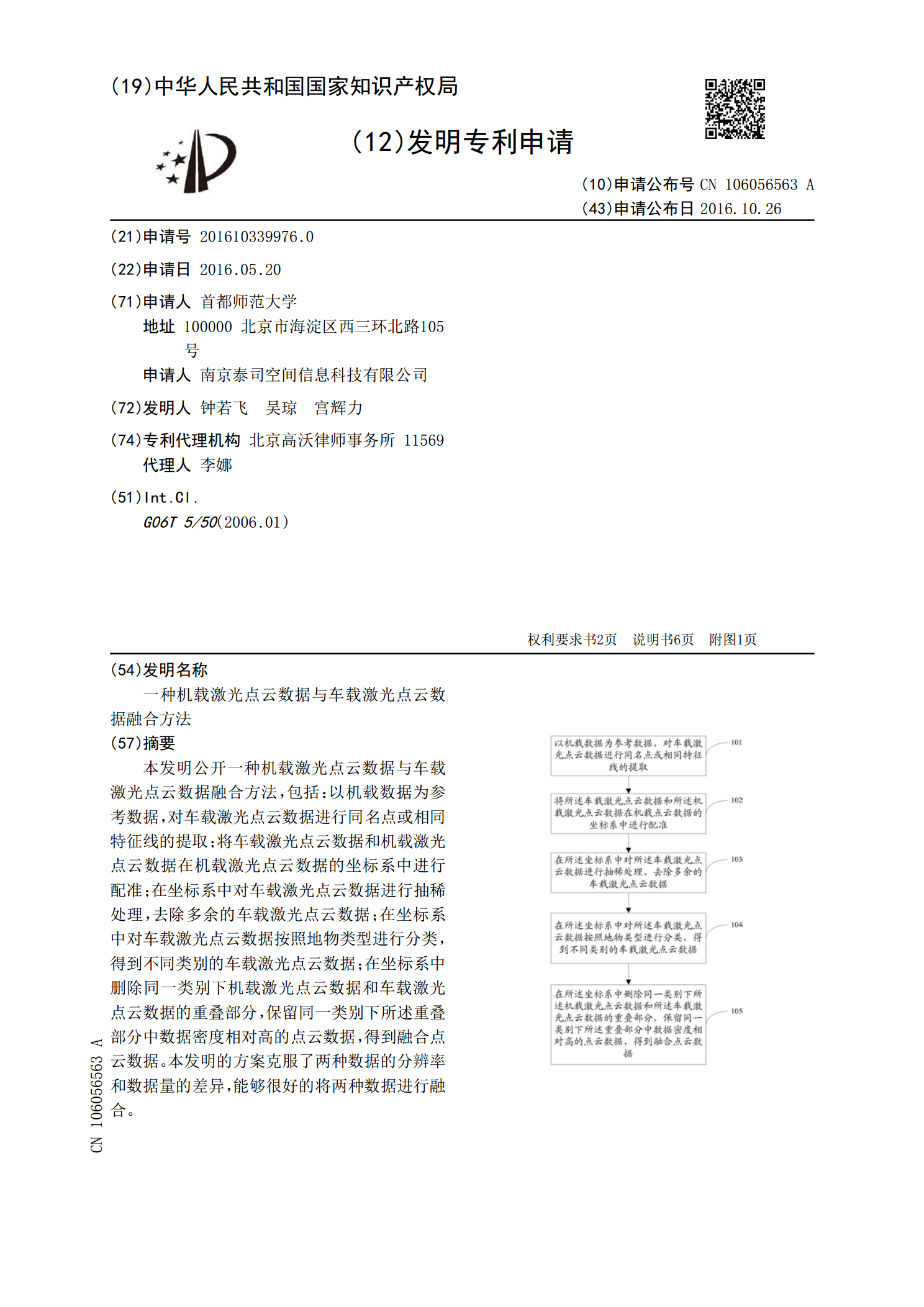
本发明公开一种机载激光点云数据与车载激光点云数据融合方法,包括:以机载数据为参考数据,对车载激光点云数据进行同名点或相同特征线的提取;将车载激光点云数据和机载激光点云数据在机载激光点云数据的坐标系中进行配准;在坐标系中对车载激光点云数据进行抽稀处理,去除多余的车载激光点云数据;在坐标系中对车载激光点云数据按照地物类型进行分类,得到不同类别的车载激光点云数据;在坐标系中删除同一类别下机载激光点云数据和车载激光点云数据的重叠部分,保留同一类别下所述重叠部分中数据密度相对高的点云数据,得到融合点云数据。本发明的

基于VTK的点云数据三维重建.docx
基于VTK的点云数据三维重建点云数据三维重建是一种将成千上万个稀疏点云点集合成完整三维模型的过程。在实际应用中,点云数据广泛用于机器人自主导航、三维建模、图像识别等领域。VTK(TheVisualizationToolkit)是一款开源的、跨平台的、用于三维可视化和图形处理的软件库,其中提供了许多实用的算法用于三维重建。本文将介绍基于VTK的点云数据三维重建及其应用。一、点云数据的获取点云数据可以通过多种方式获取:传感器获取、摄像头获取等。而获取的点云数据往往存在一些问题,例如:1.点云数据的密集度不一,