
基于交叉注意力机制的图像点云融合三维目标检测方法.pdf

冷霜****魔王

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于交叉注意力机制的图像点云融合三维目标检测方法.pdf
本发明涉及一种基于交叉注意力机制的图像点云融合三维目标检测方法及系统,属于三维目标检测领域。方法包括:对图像进行目标检测及分割处理,得到实例掩码;根据点云图像空间投影关系得到每一个实例掩码内的点云集合;使用DBSCAN聚类算法对每一个点云集合内的点云进行聚类,为前景点集合中的所有点云逐点拼接实例分割结果向量,将经图像特征渲染的点云所占的整个三维空间划分成多个柱体并进行特征拆分和重组,引入交叉注意力机制聚合柱体内每个点的位置特征和图像特征,多个柱体的融合特征构成伪图像特征;使用RPN网络提取并整合伪图像特征
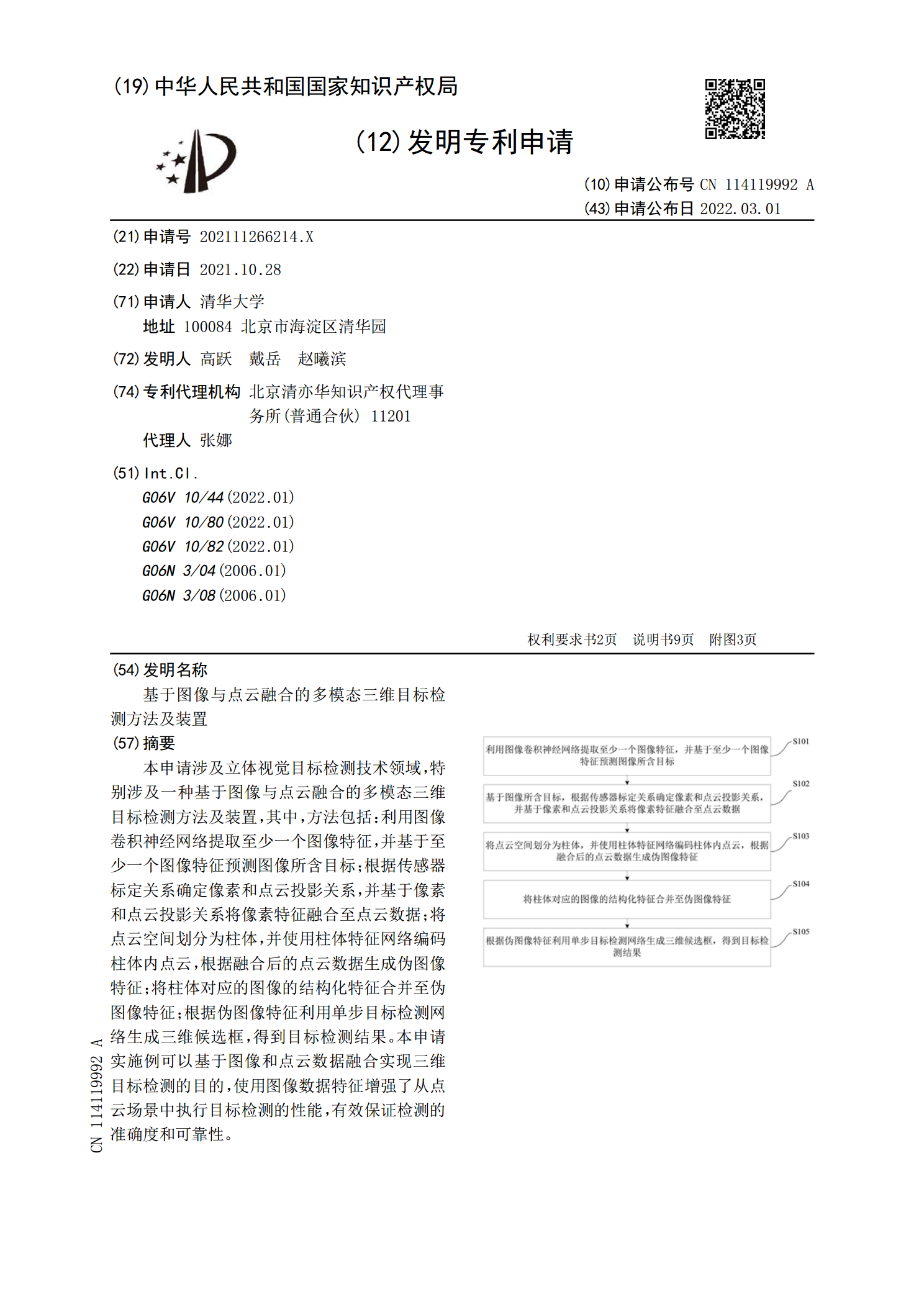
基于图像与点云融合的多模态三维目标检测方法及装置.pdf
本申请涉及立体视觉目标检测技术领域,特别涉及一种基于图像与点云融合的多模态三维目标检测方法及装置,其中,方法包括:利用图像卷积神经网络提取至少一个图像特征,并基于至少一个图像特征预测图像所含目标;根据传感器标定关系确定像素和点云投影关系,并基于像素和点云投影关系将像素特征融合至点云数据;将点云空间划分为柱体,并使用柱体特征网络编码柱体内点云,根据融合后的点云数据生成伪图像特征;将柱体对应的图像的结构化特征合并至伪图像特征;根据伪图像特征利用单步目标检测网络生成三维候选框,得到目标检测结果。本申请实施例可以
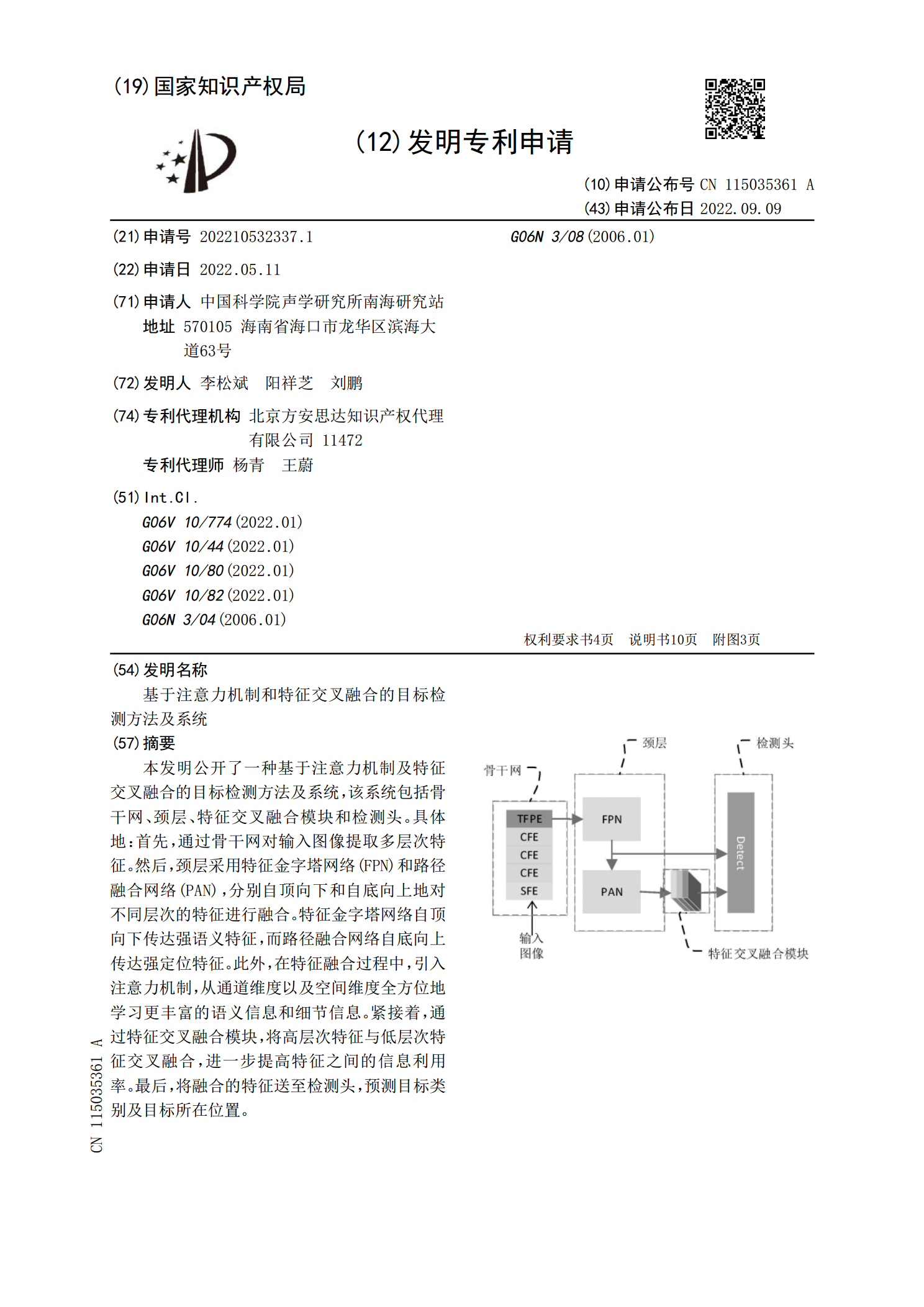
基于注意力机制和特征交叉融合的目标检测方法及系统.pdf
本发明公开了一种基于注意力机制及特征交叉融合的目标检测方法及系统,该系统包括骨干网、颈层、特征交叉融合模块和检测头。具体地:首先,通过骨干网对输入图像提取多层次特征。然后,颈层采用特征金字塔网络(FPN)和路径融合网络(PAN),分别自顶向下和自底向上地对不同层次的特征进行融合。特征金字塔网络自顶向下传达强语义特征,而路径融合网络自底向上传达强定位特征。此外,在特征融合过程中,引入注意力机制,从通道维度以及空间维度全方位地学习更丰富的语义信息和细节信息。紧接着,通过特征交叉融合模块,将高层次特征与低层次特
一种基于伪图像的点云与图像融合三维目标检测方法.pdf
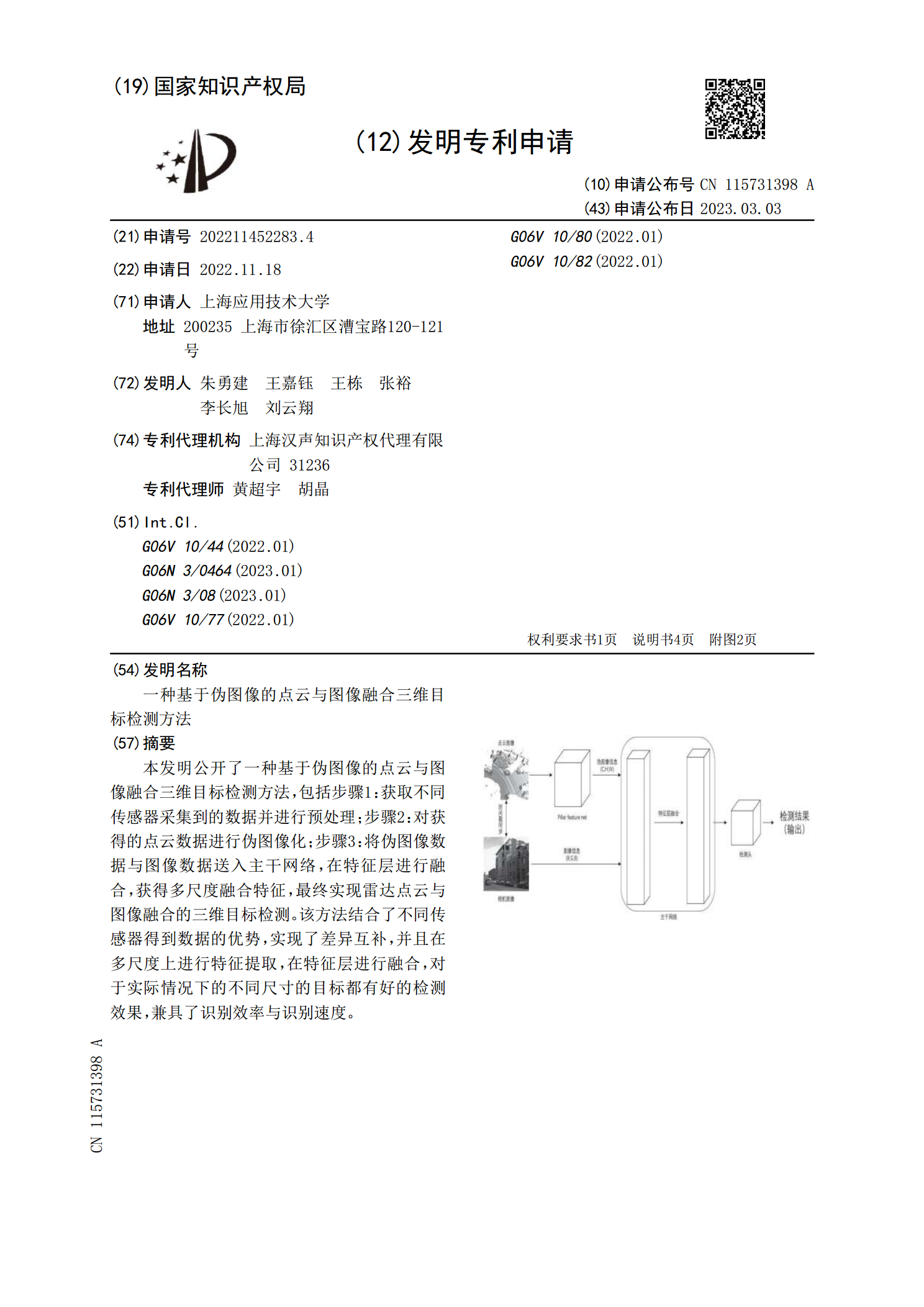
本发明公开了一种基于伪图像的点云与图像融合三维目标检测方法,包括步骤1:获取不同传感器采集到的数据并进行预处理;步骤2:对获得的点云数据进行伪图像化;步骤3:将伪图像数据与图像数据送入主干网络,在特征层进行融合,获得多尺度融合特征,最终实现雷达点云与图像融合的三维目标检测。该方法结合了不同传感器得到数据的优势,实现了差异互补,并且在多尺度上进行特征提取,在特征层进行融合,对于实际情况下的不同尺寸的目标都有好的检测效果,兼具了识别效率与识别速度。

基于密度图与注意力机制融合的遥感图像目标检测方法.pdf
基于密度图与注意力机制融合的遥感图像目标检测方法。本发明主要基于密度图切割的思想,通过物体的稀疏或密集的分布情况,指导图像进行前景与背景的分割,尽可能减少目标检测中对于背景部分的计算,降低复杂背景对于小目标检测的影响,结合注意力机制,通过网络中的通道注意力机制过滤冗余矛盾的背景信息。使用空间注意力机制,更加关注图像中的目标区域,并抑制了非目标区域或背景区域。采用改进的FPN金字塔网络进行目标检测的多尺度特征提取,融合低层特征高分辨率和高层特征的高语义信息,用Soft‑NMS替换NMS,减少误检率。最后采用