
机器人速度测试方法和装置.pdf

邻家****mk


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机器人速度测试方法和装置.pdf
本发明涉及工业机器人技术领域,公开了一种机器人速度测试方法和装置,其中方法包括:控制机器人按照测试程序运行,借助采样设备采集机器人上被检测点的位置数组A,根据采集到的位置数组A计算出机器人上被检测点在该测试程序条件下运行至任一位置点A<base:Sub>n</base:Sub>时的速度特性参数。本发明能够在不借助机器人自带控制器读取电机编码器数据的基础上,从执行端完成机器人速度性能的测试。

速度控制的方法和装置.pdf
本申请公开了一种速度控制的方法和装置,属于电机控制技术领域,该方法包括,获取电机驱动系统当前时刻的运行时间和运行速度;根据运行时间,以及存储的第一预设速度模型,获得下一时刻的第一速度;以及根据运行时间,以及存储的第二预设速度模型,获得下一时刻的第二速度,第二预设速度模型是第一预设速度模型根据预设滞后时间变换获得的;根据下一时刻的第一速度、下一时刻的第二速度、预设滞后时间以及当前时刻的运行速度,确定下一时刻的运行速度;按照下一时刻的运行速度,控制电机驱动系统执行相应的速度调整操作。这样,降低了对速度进行平滑
用于机器人的速度平滑方法及装置.pdf
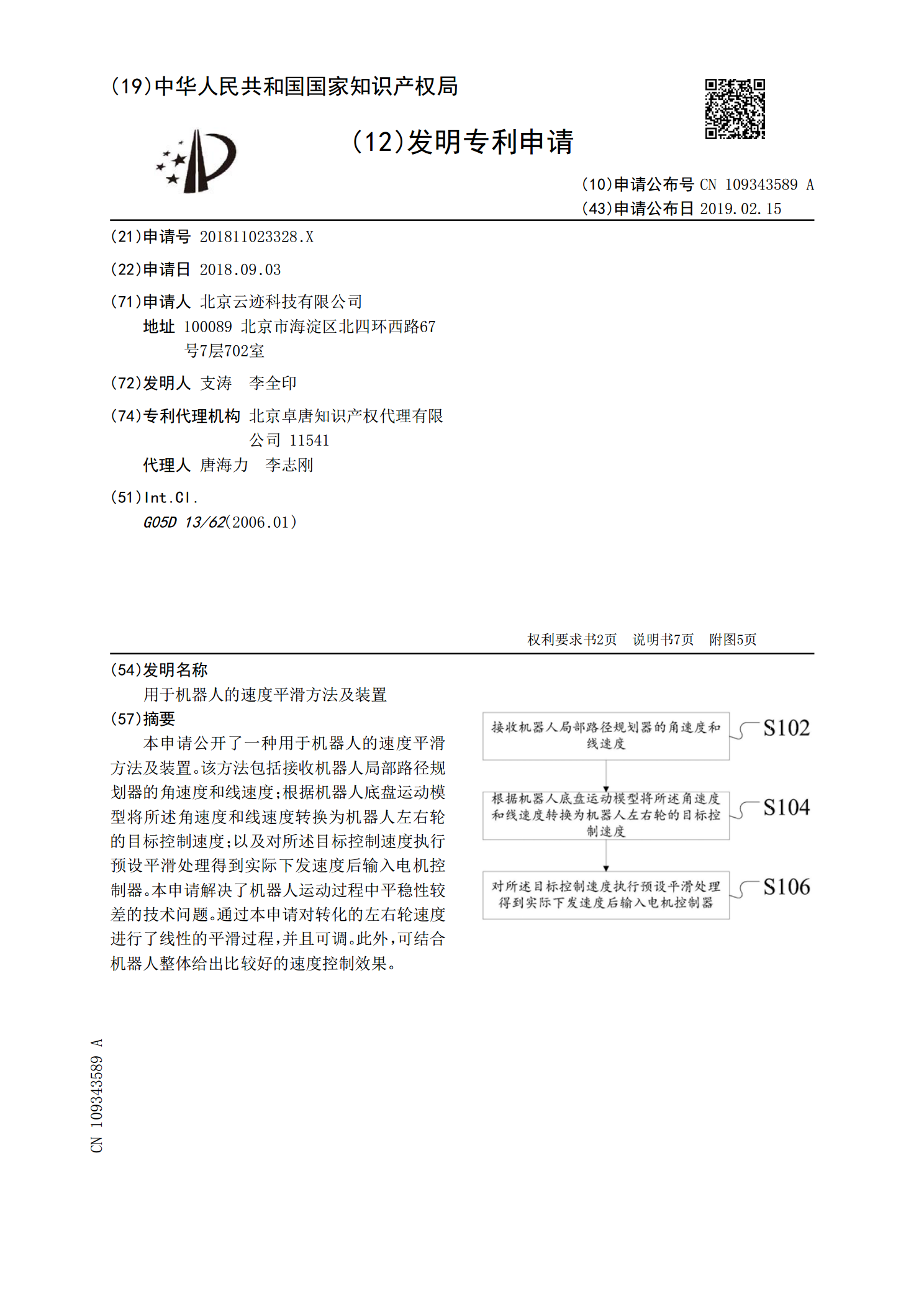
本申请公开了一种用于机器人的速度平滑方法及装置。该方法包括接收机器人局部路径规划器的角速度和线速度;根据机器人底盘运动模型将所述角速度和线速度转换为机器人左右轮的目标控制速度;以及对所述目标控制速度执行预设平滑处理得到实际下发速度后输入电机控制器。本申请解决了机器人运动过程中平稳性较差的技术问题。通过本申请对转化的左右轮速度进行了线性的平滑过程,并且可调。此外,可结合机器人整体给出比较好的速度控制效果。

机器人刚度性能测试方法和装置.pdf
本发明涉及工业机器人领域,公开了一种机器人刚度性能测试方法和装置,方法包括:控制机器人执行特定的测试动作,借助采样设备采集机器人执行点的点组A,将点组A的坐标点和采集时间结合获得机器人执行点位置和时间的波动曲线;根据所述机器人执行点位置和时间的波动曲线,进行机器人刚度性能分析。本发明能基于激光跟踪仪实现机器人轨迹抖动幅度、轨迹抖动频率、固有频率等刚度性能的测试。

限制上传速度的方法和装置.pdf
本发明公开了一种限制上传速度的方法和装置,属于计算机通信领域。该方法包括:判断用户的状态,测量用户上传带宽的最大值;当用户状态为忙时,按照预设的策略和最大值,对用户进行上传速度限制,当用户进行上传速度限制达到第二时长后,取消上传速度限制。该装置包括:判断模块,带宽测量模块和速度限制模块。本发明达到了动态控制上传速度,合理利用带宽的效果,既为用户保留了上网浏览等必需的上行带宽,又为节点作为P2P应用的服务器时提供了尽可能多的服务,充分利用了P2P网络的富余带宽,增强了用户体验。