
用于激光雷达的数据处理方法及激光雷达.pdf

努力****南绿


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于激光雷达的数据处理方法及激光雷达.pdf
本发明提供一种用于激光雷达的数据处理方法,包括S101:采用初始探测窗口进行k次探测扫描,获得k次探测扫描的结果,作为第一组探测数据,其中k为整数,k≥1;S102:基于第一组探测数据,确定回波脉冲到达时刻在初始探测窗口中的位置;S103:根据回波脉冲的位置调整探测窗口,使得调整后的探测窗口包括回波脉冲的位置,且小于初始探测窗口;S104:采用调整后的探测窗口进行n次探测扫描,获得n次探测扫描的结果,作为第二组探测数据,其中n为整数,n≥1;S105:基于第一组探测数据和第二组探测数据,确定目标物的距离和

一种激光雷达、激光雷达系统及数据处理方法.pdf
本发明实施例公开了一种激光雷达、激光雷达系统及数据处理方法,激光雷达系统包括处理器和激光雷达,处理器和激光雷达之间具有通信连接;激光雷达包括基座和旋转体,旋转体上设置有准直光束的发射端、准直光束的接收端以及惯性传感器,发射端和接收端用于向处理器提供发射接收信息,发射接收信息包括发射准直光束的时刻t

应用于激光雷达的盲区修复方法、装置及激光雷达.pdf
本申请实施例涉及激光雷达技术领域,公开了一种应用于激光雷达的盲区修复方法、装置、激光雷达及机器人,该方法通过分析标定点云的形态,筛选出质量类型是可修复雷达的激光雷达,对可修复雷达计算并记录近距盲区距离,并且在实际测距过程中,将近距盲区距离与各点的测量距离进行比较,作为触发对点云数据进行盲区修复的条件。相比于对各种质量类型的激光雷达均进行盲区修复(例如对点云缺失严重的不良雷达进行盲区修复),使得盲区修复是在准确有修复价值的前提下进行的,即能够确保修复的可靠性。另一方面,当目标物体进入盲区时才进行盲区修复,能

一种激光雷达数据处理方法.pdf
本发明公开了一种激光雷达数据处理方法,包括:采集车辆前方初始稀疏点云数据,及车辆位置、姿态数据;从所述初始稀疏点云数据中提取第i+1帧点云数据和第i帧点云数据的目标对象特征;根据目标对象特征,得出第i+1帧点云数据到第i帧点云数据的平移向量和旋转矩阵;将点云数据经过坐标变换后拼接在一起,得到拼接后的点云数据;对第i帧点云数据进行插值,得到插值后的点云数据;将拼接后得到的点云数据与插值后得到的点云数据取均值,作为最终点云数据。本发明利用提取出来的目标对象的特征对相邻点云进行拼接,与插值得到的点云数据进行融合
用于激光雷达系统的激光雷达传感器.pdf
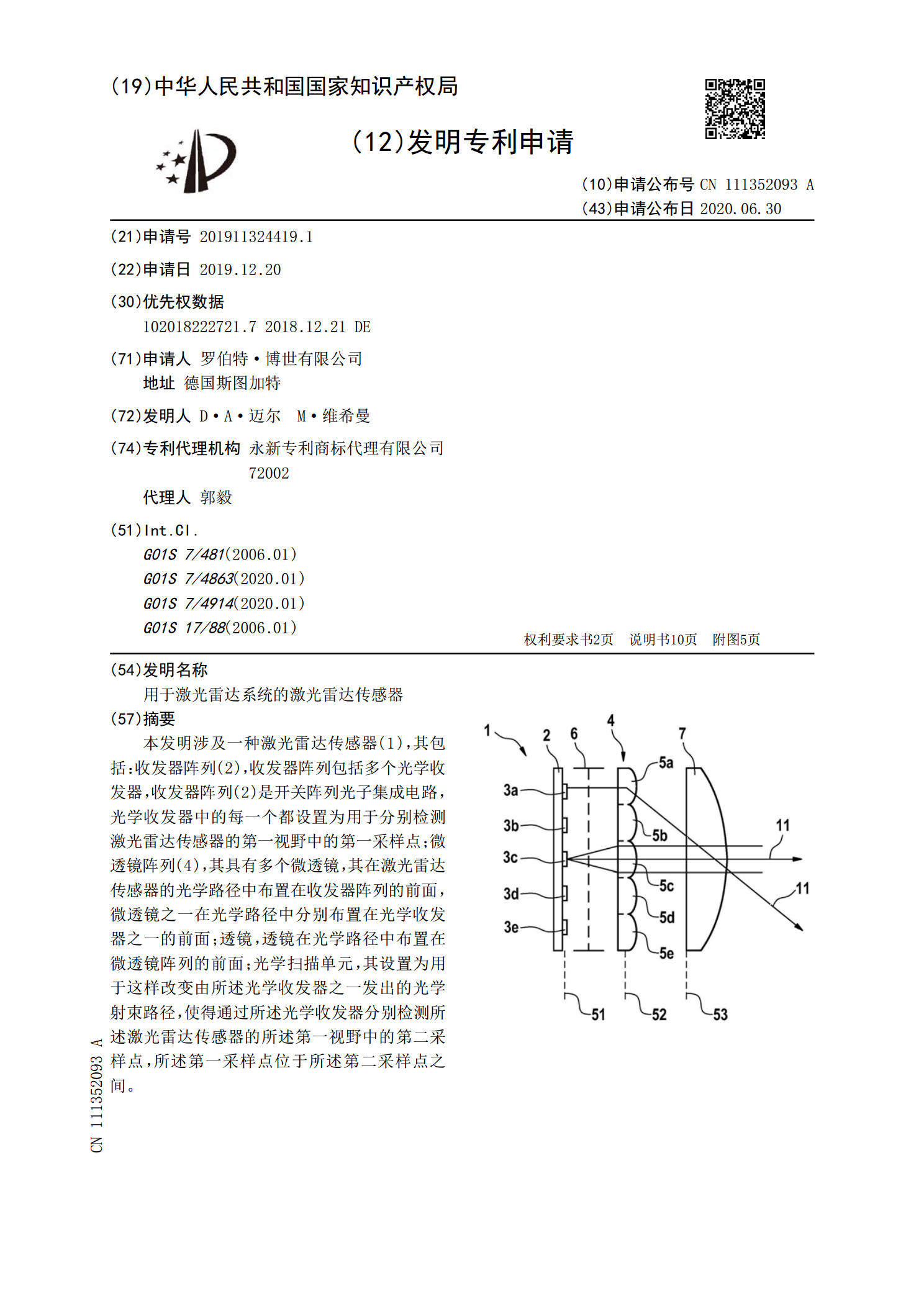
本发明涉及一种激光雷达传感器(1),其包括:收发器阵列(2),收发器阵列包括多个光学收发器,收发器阵列(2)是开关阵列光子集成电路,光学收发器中的每一个都设置为用于分别检测激光雷达传感器的第一视野中的第一采样点;微透镜阵列(4),其具有多个微透镜,其在激光雷达传感器的光学路径中布置在收发器阵列的前面,微透镜之一在光学路径中分别布置在光学收发器之一的前面;透镜,透镜在光学路径中布置在微透镜阵列的前面;光学扫描单元,其设置为用于这样改变由所述光学收发器之一发出的光学射束路径,使得通过所述光学收发器分别检测所述