
应用于激光雷达的盲区修复方法、装置及激光雷达.pdf

猫巷****正德


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

应用于激光雷达的盲区修复方法、装置及激光雷达.pdf
本申请实施例涉及激光雷达技术领域,公开了一种应用于激光雷达的盲区修复方法、装置、激光雷达及机器人,该方法通过分析标定点云的形态,筛选出质量类型是可修复雷达的激光雷达,对可修复雷达计算并记录近距盲区距离,并且在实际测距过程中,将近距盲区距离与各点的测量距离进行比较,作为触发对点云数据进行盲区修复的条件。相比于对各种质量类型的激光雷达均进行盲区修复(例如对点云缺失严重的不良雷达进行盲区修复),使得盲区修复是在准确有修复价值的前提下进行的,即能够确保修复的可靠性。另一方面,当目标物体进入盲区时才进行盲区修复,能
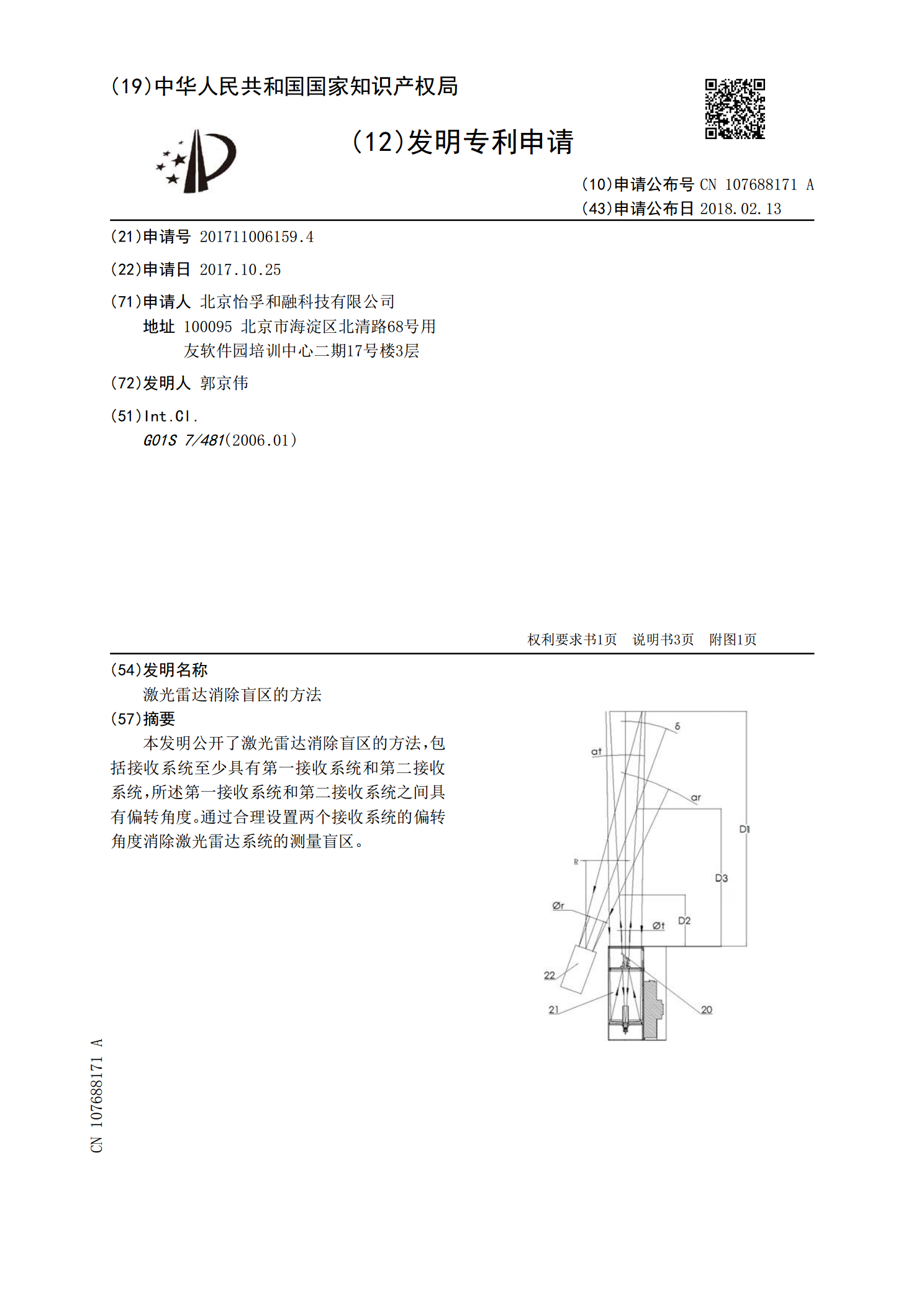
激光雷达消除盲区的方法.pdf
本发明公开了激光雷达消除盲区的方法,包括接收系统至少具有第一接收系统和第二接收系统,所述第一接收系统和第二接收系统之间具有偏转角度。通过合理设置两个接收系统的偏转角度消除激光雷达系统的测量盲区。

能够减少盲区的激光雷达.pdf
本发明公开一种能够减少盲区的激光雷达。根据本发明的一实施例的激光雷达包括:发射部,能够发出激光;发射透镜,位于发射部的出光路径,具有使激光入射到发射透镜的入射部以及使激光从发射透镜射出的出射部,发射透镜从入射部延伸至出射部,且包括第一拐角部和第二拐角部;接收部,接收从发射部发出后在激光雷达外部的物体反射的激光;接收透镜,能够改变从发射部发出后在物体反射的激光的路径而使其照射到接收部,其中,激光在发射透镜的第一拐角部和第二拐角部产生反射,发射透镜的出射部的主轴与接收透镜的主轴位于同一直线,发射透镜的从入射部

一种可消除盲区的光学装置及激光雷达.pdf
本发明提供了一种可消除盲区的光学装置及激光雷达,涉及激光雷达领域。可消除盲区的光学装置包括激光发射器、激光接收器、透镜组及消除件。激光发射器、激光接收器和消除件均位于透镜组的一端,激光发射器用于向透镜组发射激光,激光接收器用于接收目标物体反射的激光。通过将消除件设置在激光接收器的一侧,以实现阻挡或吸收激光发射器发射的部分激光以及杂散光,从而减少甚至消除直接从激光发射器射向激光接收器的激光以及杂散光,消除激光雷达的探测盲区,增大探测范围。
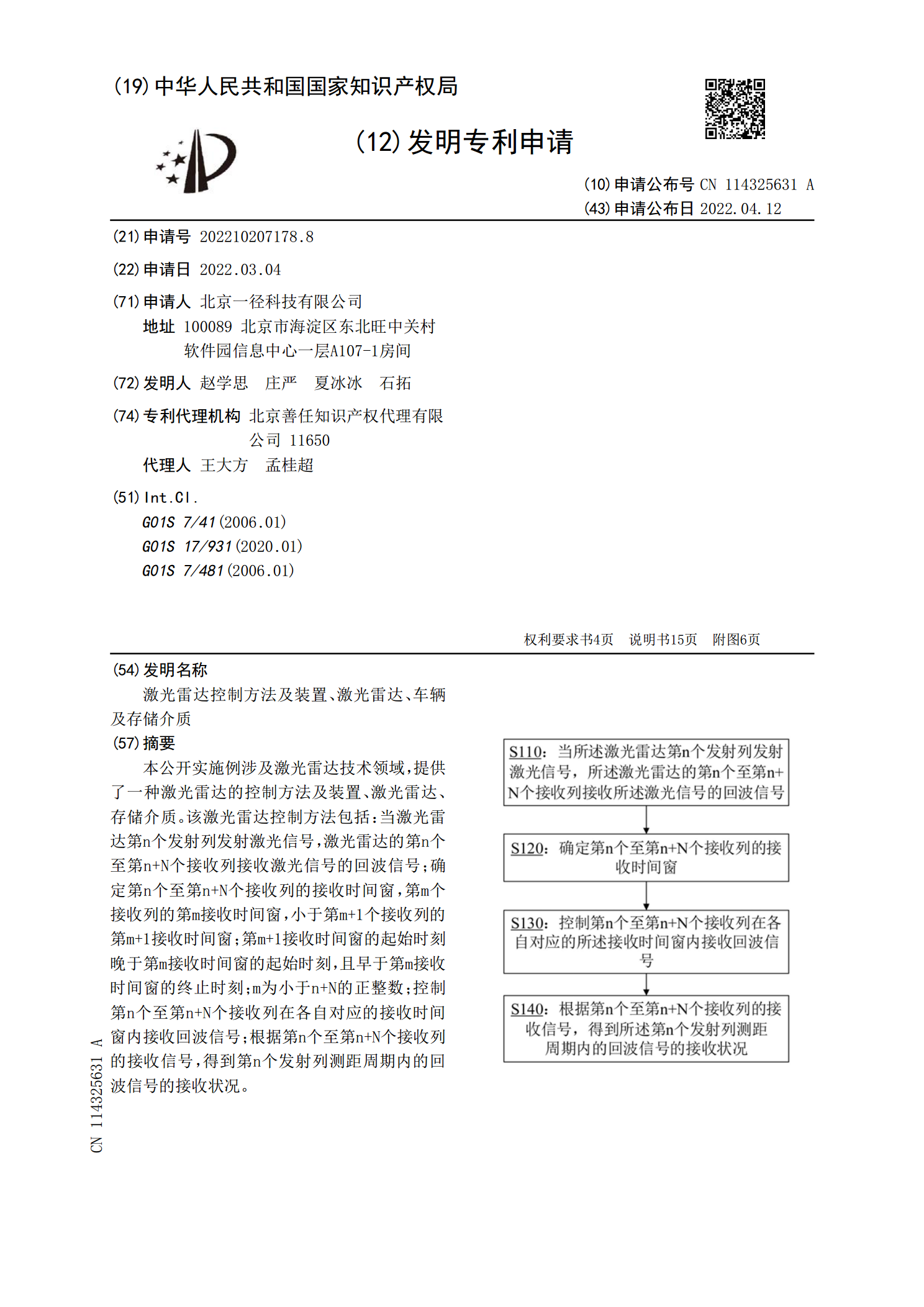
激光雷达控制方法及装置、激光雷达、车辆及存储介质.pdf
本公开实施例涉及激光雷达技术领域,提供了一种激光雷达的控制方法及装置、激光雷达、存储介质。该激光雷达控制方法包括:当激光雷达第n个发射列发射激光信号,激光雷达的第n个至第n+N个接收列接收激光信号的回波信号;确定第n个至第n+N个接收列的接收时间窗,第m个接收列的第m接收时间窗,小于第m+1个接收列的第m+1接收时间窗;第m+1接收时间窗的起始时刻晚于第m接收时间窗的起始时刻,且早于第m接收时间窗的终止时刻;m为小于n+N的正整数;控制第n个至第n+N个接收列在各自对应的接收时间窗内接收回波信号;根据第n