
一种基于模型预测控制的内河无人船避碰方法.pdf

猫巷****正德

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
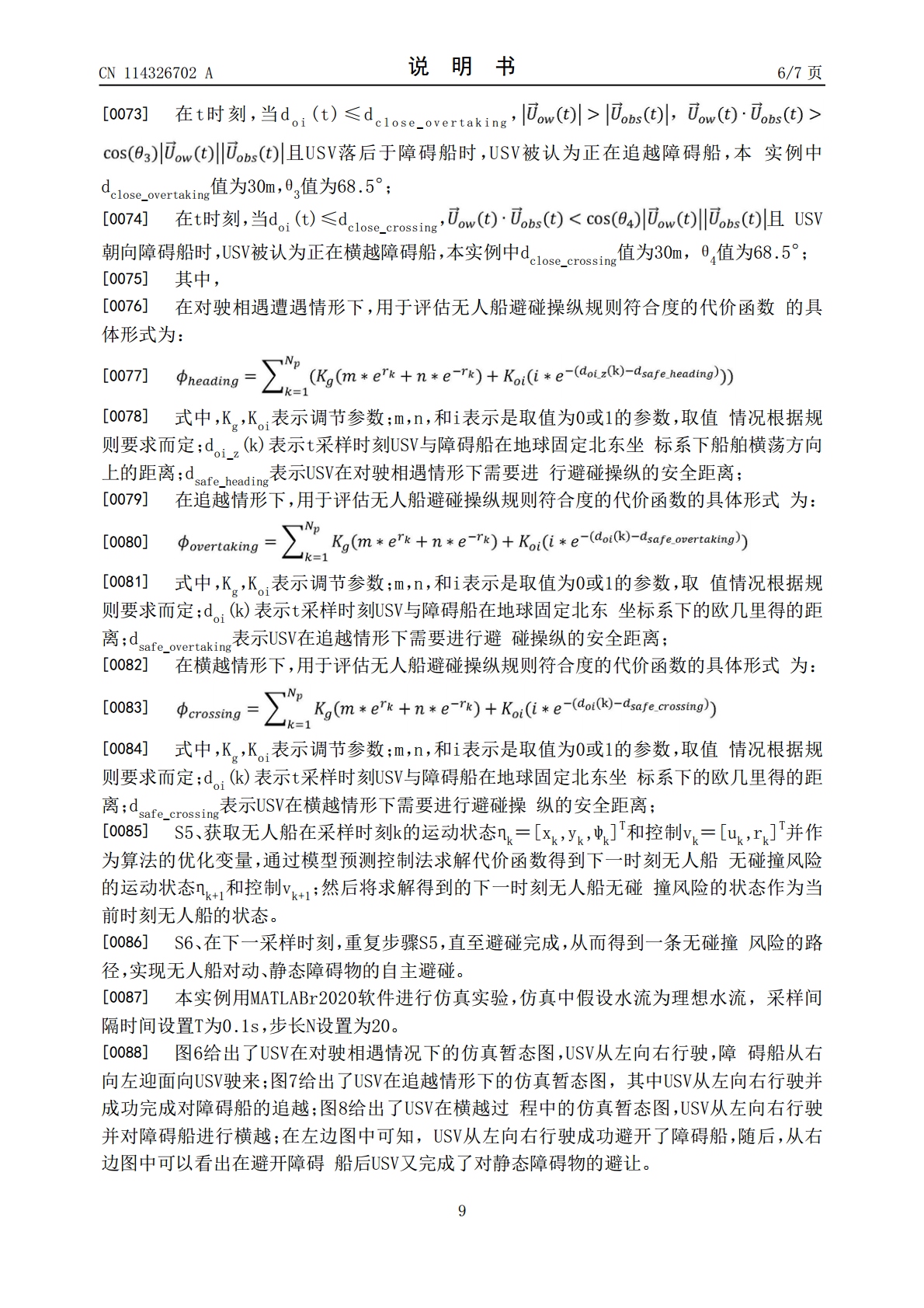
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于模型预测控制的内河无人船避碰方法.pdf
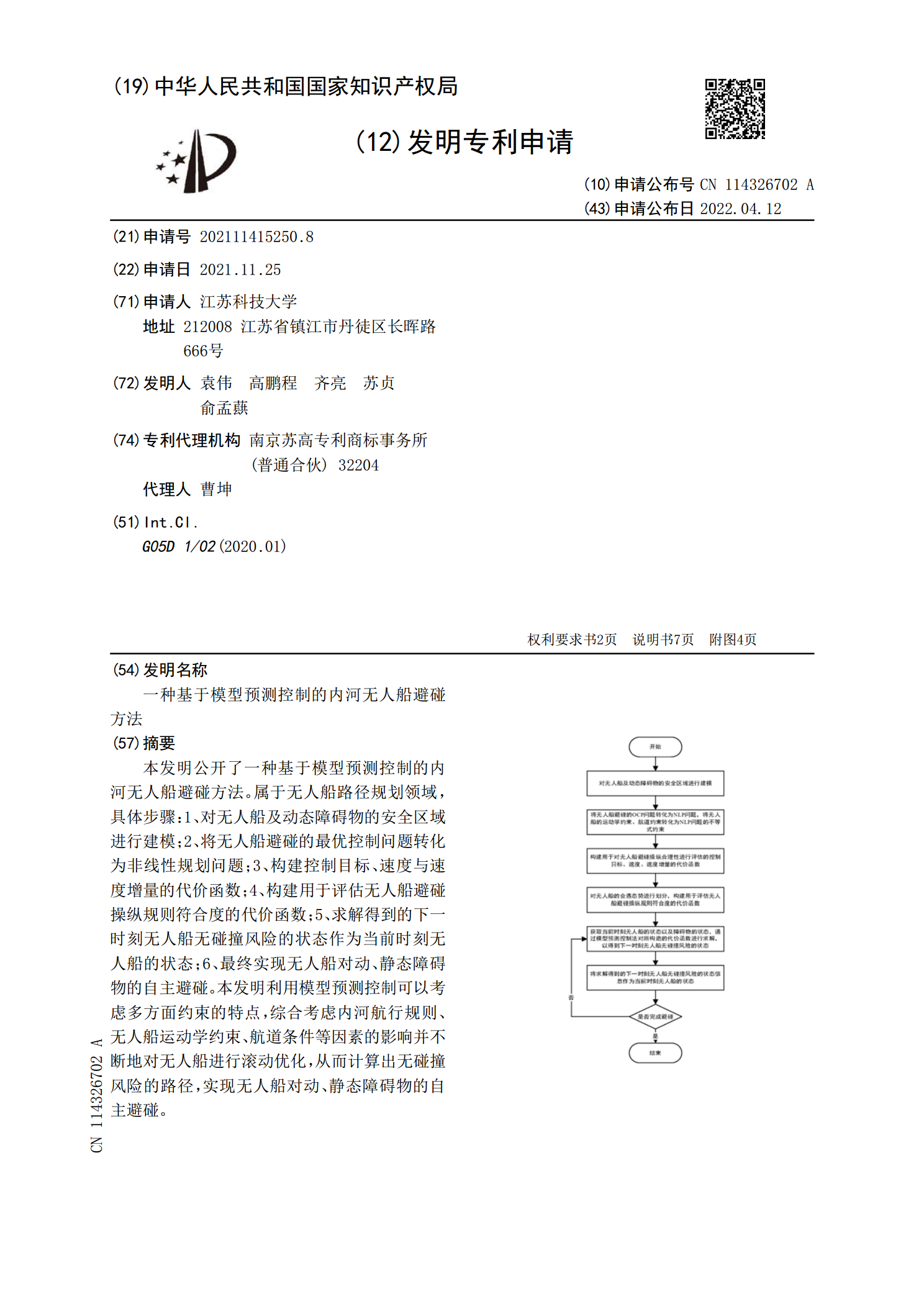
本发明公开了一种基于模型预测控制的内河无人船避碰方法。属于无人船路径规划领域,具体步骤:1、对无人船及动态障碍物的安全区域进行建模;2、将无人船避碰的最优控制问题转化为非线性规划问题;3、构建控制目标、速度与速度增量的代价函数;4、构建用于评估无人船避碰操纵规则符合度的代价函数;5、求解得到的下一时刻无人船无碰撞风险的状态作为当前时刻无人船的状态;6、最终实现无人船对动、静态障碍物的自主避碰。本发明利用模型预测控制可以考虑多方面约束的特点,综合考虑内河航行规则、无人船运动学约束、航道条件等因素的影响并不断
一种基于前视雷达的无人船避碰方法.pdf
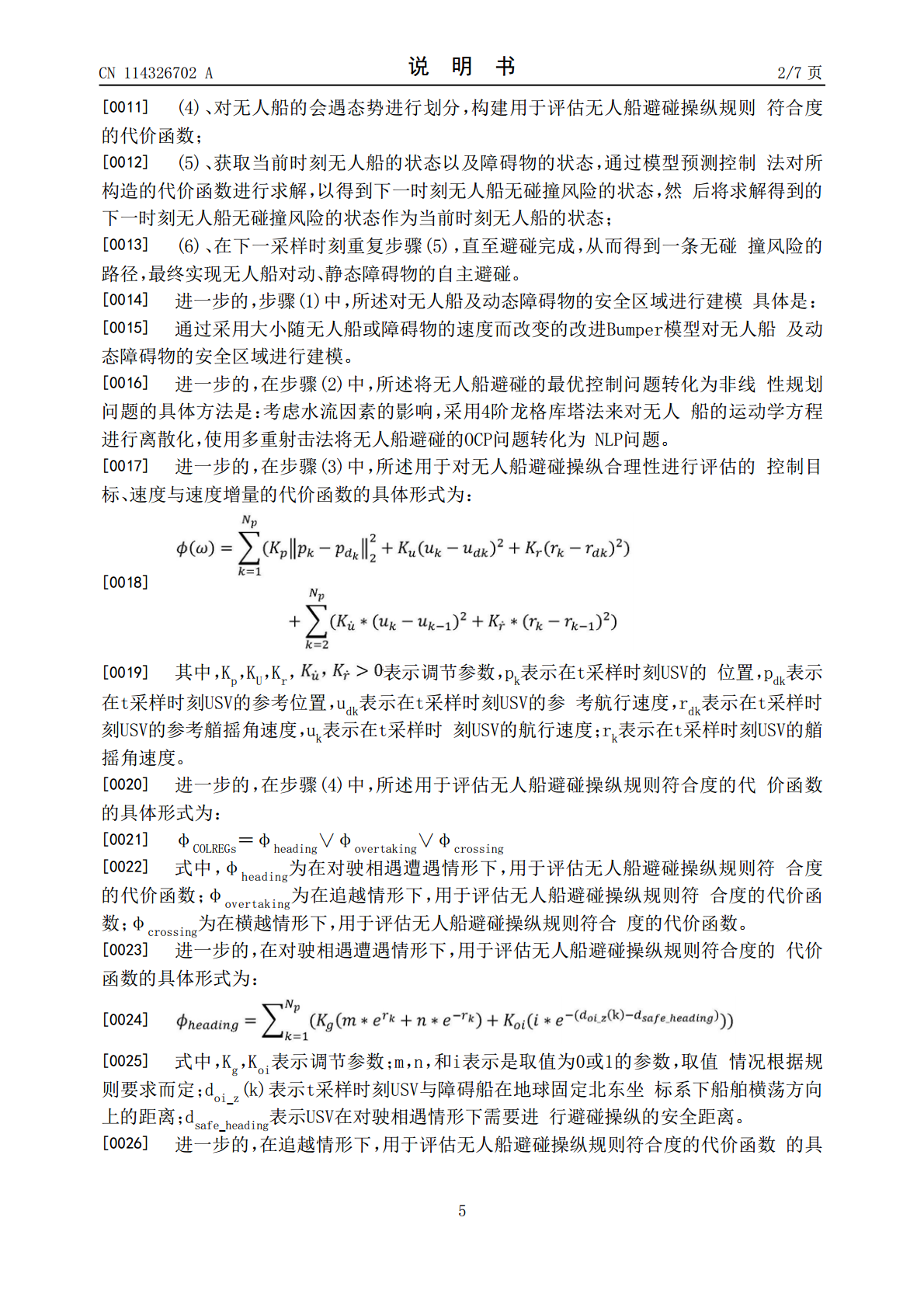
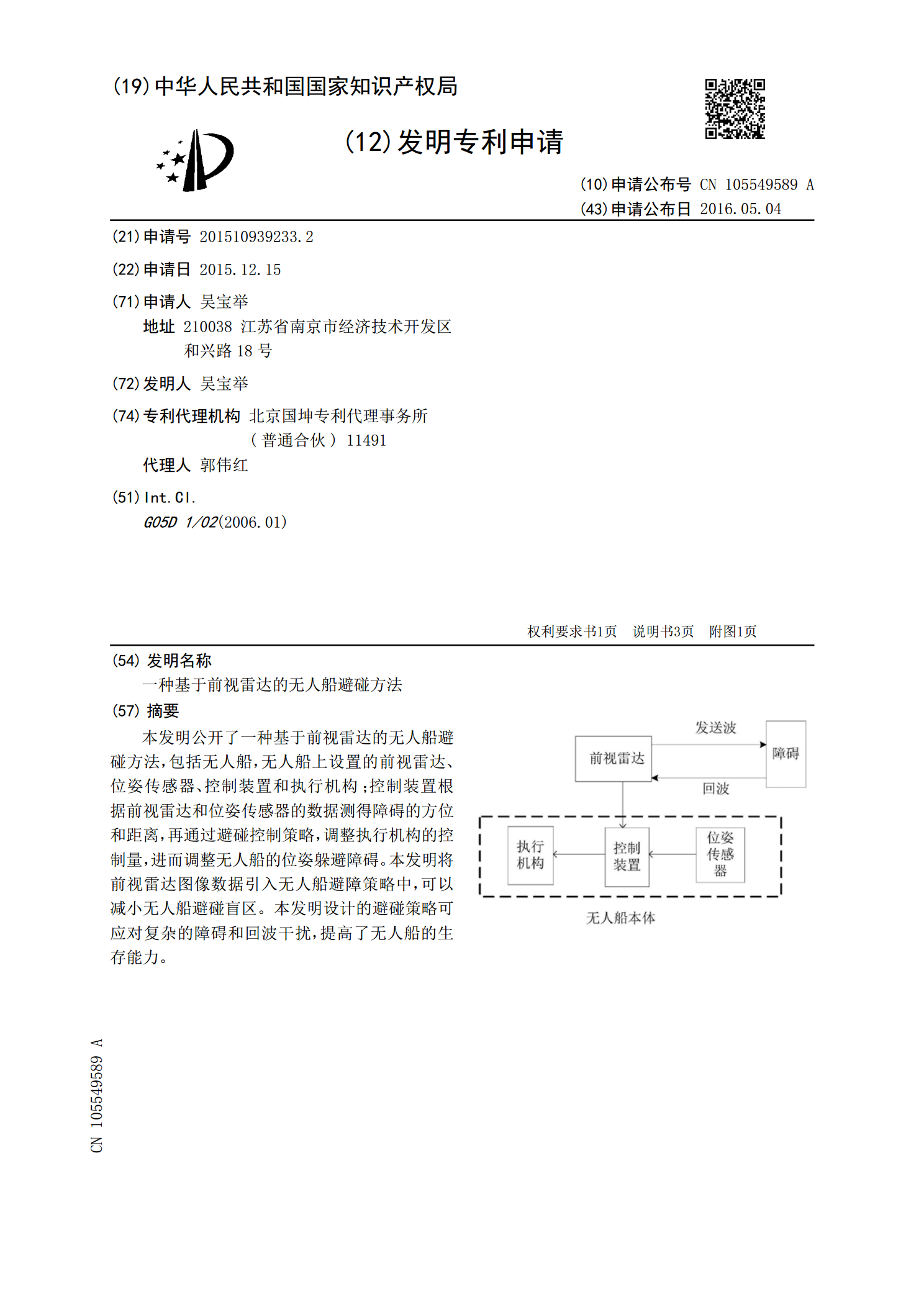
本发明公开了一种基于前视雷达的无人船避碰方法,包括无人船,无人船上设置的前视雷达、位姿传感器、控制装置和执行机构;控制装置根据前视雷达和位姿传感器的数据测得障碍的方位和距离,再通过避碰控制策略,调整执行机构的控制量,进而调整无人船的位姿躲避障碍。本发明将前视雷达图像数据引入无人船避障策略中,可以减小无人船避碰盲区。本发明设计的避碰策略可应对复杂的障碍和回波干扰,提高了无人船的生存能力。
一种基于多雷达感知的无人船避障方法.pdf
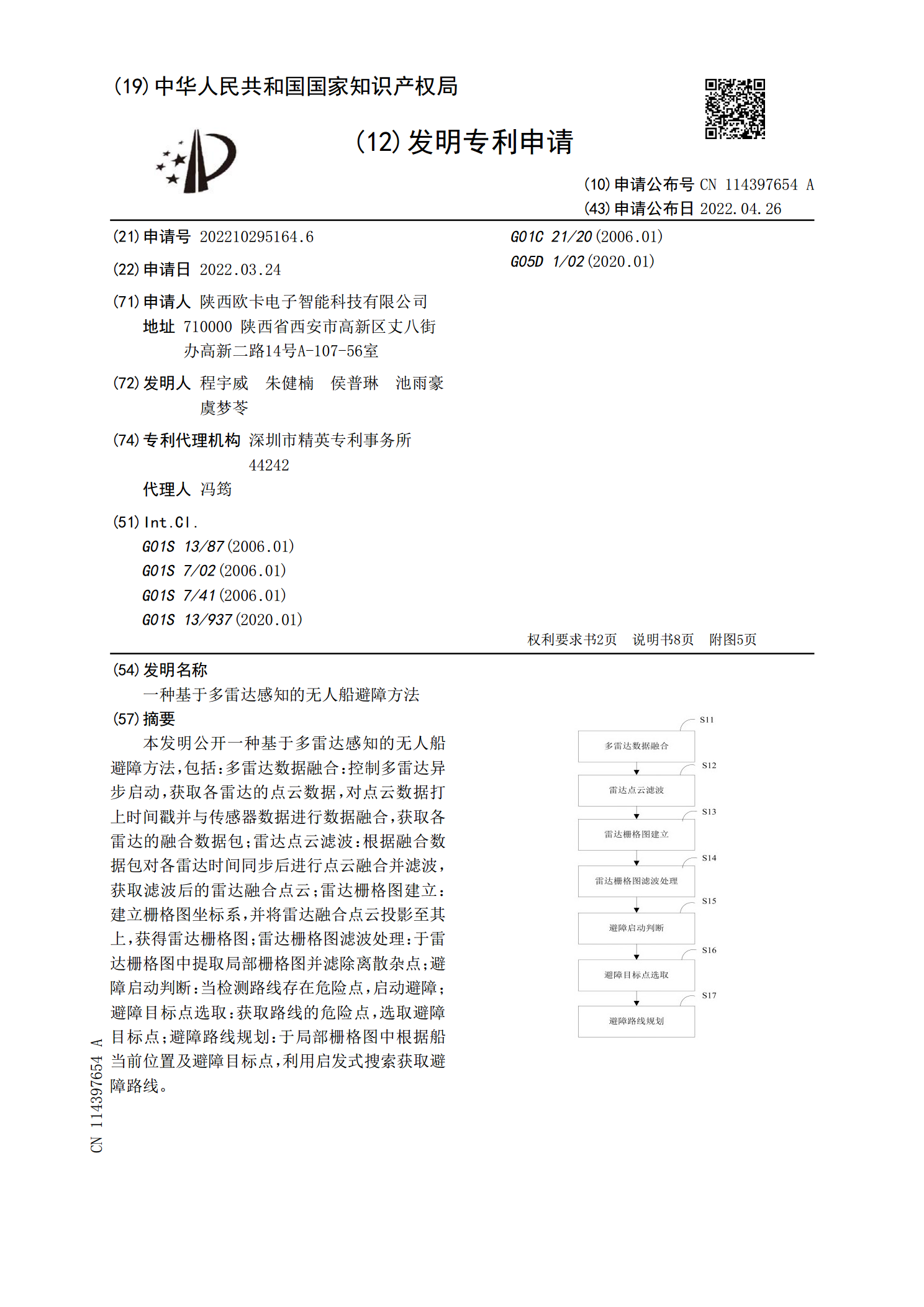
本发明公开一种基于多雷达感知的无人船避障方法,包括:多雷达数据融合:控制多雷达异步启动,获取各雷达的点云数据,对点云数据打上时间戳并与传感器数据进行数据融合,获取各雷达的融合数据包;雷达点云滤波:根据融合数据包对各雷达时间同步后进行点云融合并滤波,获取滤波后的雷达融合点云;雷达栅格图建立:建立栅格图坐标系,并将雷达融合点云投影至其上,获得雷达栅格图;雷达栅格图滤波处理:于雷达栅格图中提取局部栅格图并滤除离散杂点;避障启动判断:当检测路线存在危险点,启动避障;避障目标点选取:获取路线的危险点,选取避障目标点
一种基于tube的无人船模型预测容错控制方法.pdf
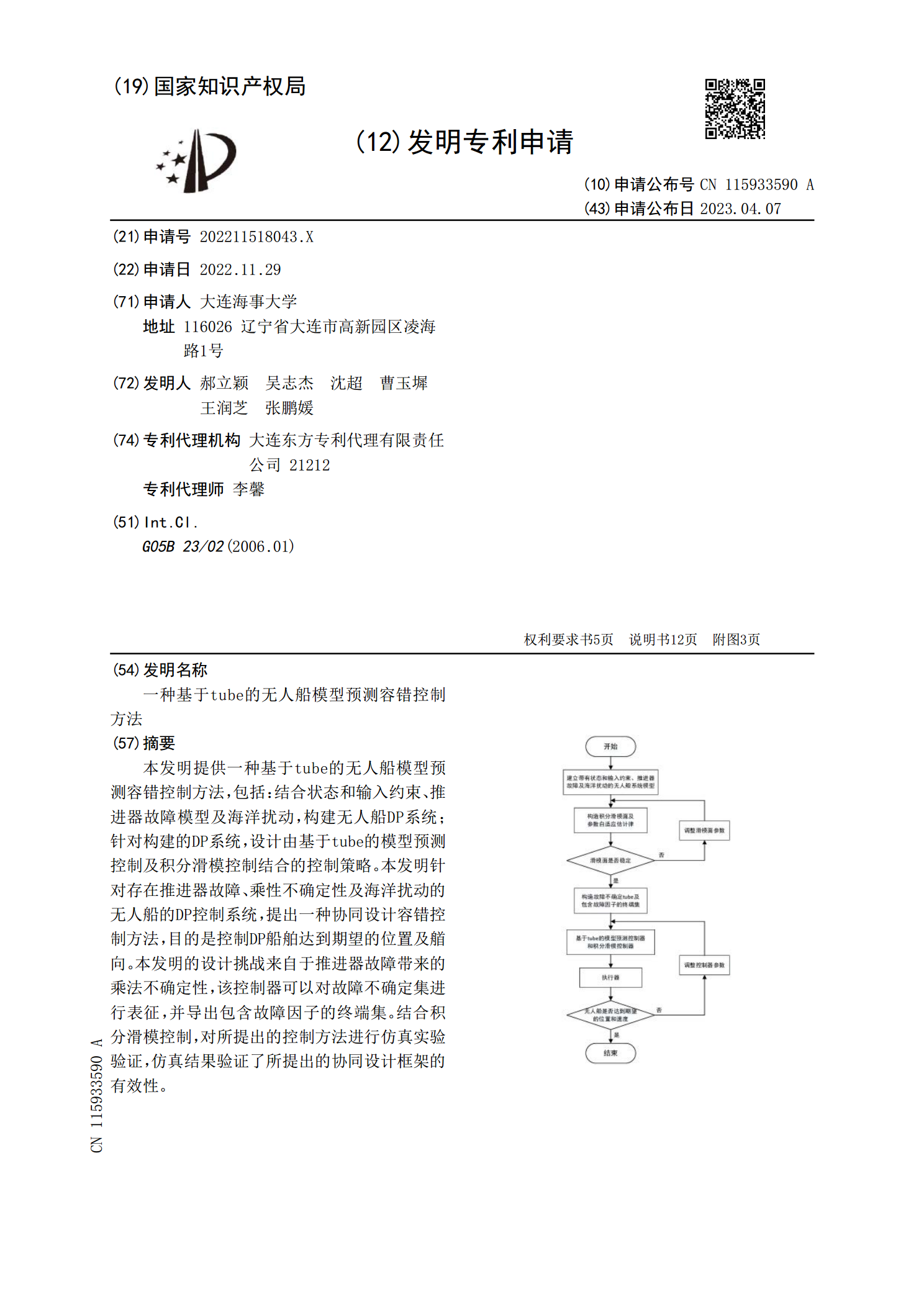
本发明提供一种基于tube的无人船模型预测容错控制方法,包括:结合状态和输入约束、推进器故障模型及海洋扰动,构建无人船DP系统;针对构建的DP系统,设计由基于tube的模型预测控制及积分滑模控制结合的控制策略。本发明针对存在推进器故障、乘性不确定性及海洋扰动的无人船的DP控制系统,提出一种协同设计容错控制方法,目的是控制DP船舶达到期望的位置及艏向。本发明的设计挑战来自于推进器故障带来的乘法不确定性,该控制器可以对故障不确定集进行表征,并导出包含故障因子的终端集。结合积分滑模控制,对所提出的控制方法进行仿
无人车避碰方法和装置.pdf
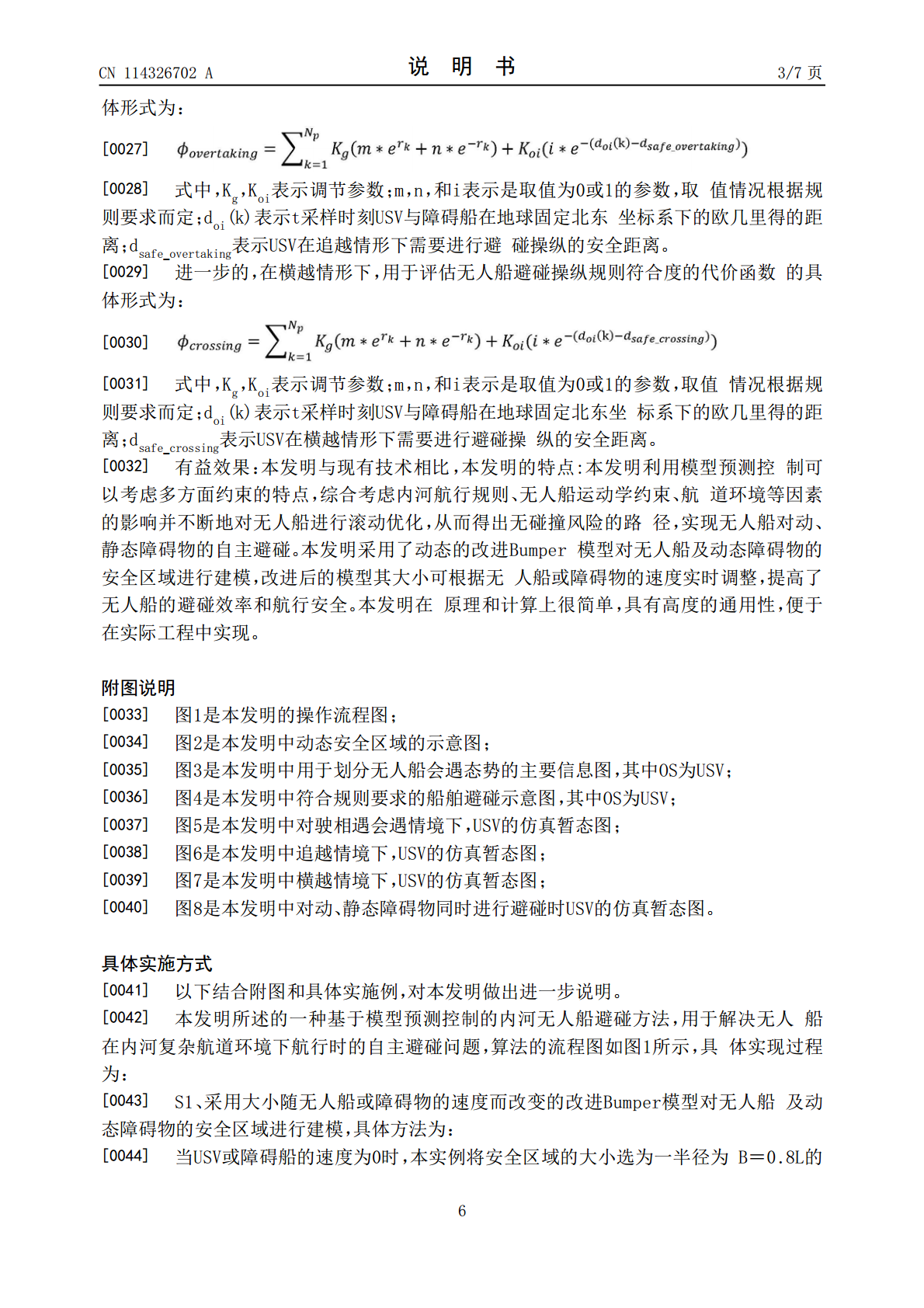
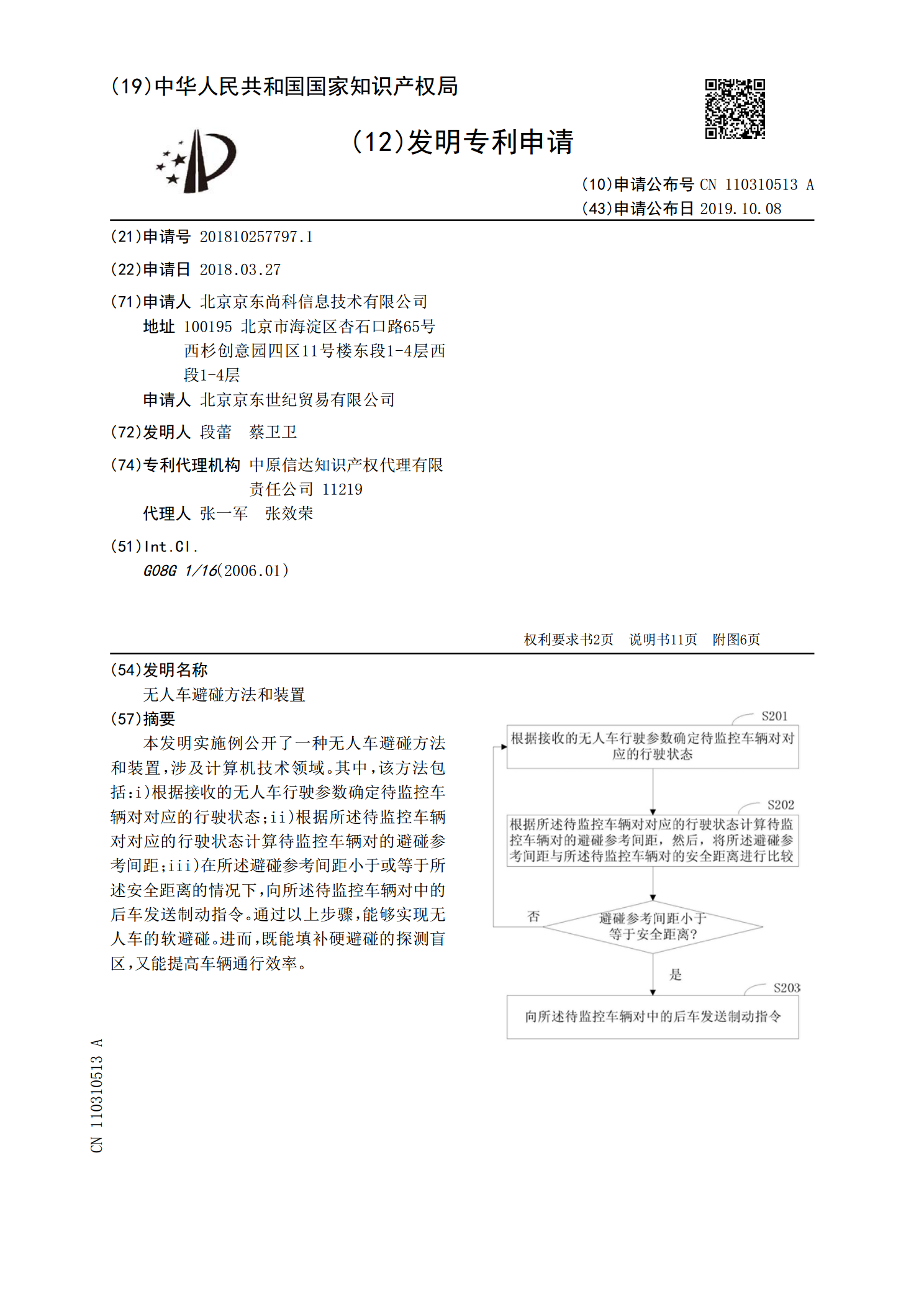
本发明实施例公开了一种无人车避碰方法和装置,涉及计算机技术领域。其中,该方法包括:i)根据接收的无人车行驶参数确定待监控车辆对对应的行驶状态;ii)根据所述待监控车辆对对应的行驶状态计算待监控车辆对的避碰参考间距;iii)在所述避碰参考间距小于或等于所述安全距离的情况下,向所述待监控车辆对中的后车发送制动指令。通过以上步骤,能够实现无人车的软避碰。进而,既能填补硬避碰的探测盲区,又能提高车辆通行效率。