
轮毂电机电动汽车电子差速低速转向控制仿真.docx

小寄****淑k


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮毂电机电动汽车电子差速低速转向控制仿真.docx
轮毂电机电动汽车电子差速低速转向控制仿真证明了阿克曼原理适合于低速转向.参考文献[1]蒋鸣雷,张欣,杨庆保.纯电动汽车低速转向差速控制方法研究[J].北京汽车,2022(2):20-23.[2]李周清.外转子永磁轮毂电机的设计研究[J].机电工程技术,2022,41(3):1-6.[3]孙明江.轮毂电机电动汽车电子差速控制研究[D].锦州:辽宁工业大学,2022.[4]丁张根,罗文广.基于CANoe-MATLAB的电动机仿真控制的研究[J].广西科技大学学报,2022,25(2):58-63.[5]杨庆保

轮毂电机电动汽车电子差速低速转向控制仿真.docx
轮毂电机电动汽车电子差速低速转向控制仿真证明了阿克曼原理适合于低速转向.参考文献[1]蒋鸣雷,张欣,杨庆保.纯电动汽车低速转向差速控制方法研究[J].北京汽车,2022(2):20-23.[2]李周清.外转子永磁轮毂电机的设计研究[J].机电工程技术,2022,41(3):1-6.[3]孙明江.轮毂电机电动汽车电子差速控制研究[D].锦州:辽宁工业大学,2022.[4]丁张根,罗文广.基于CANoe-MATLAB的电动机仿真控制的研究[J].广西科技大学学报,2022,25(2):58-63.[5]杨庆保
轮毂电机驱动电动汽车的差速转向系统及其电动汽车.pdf
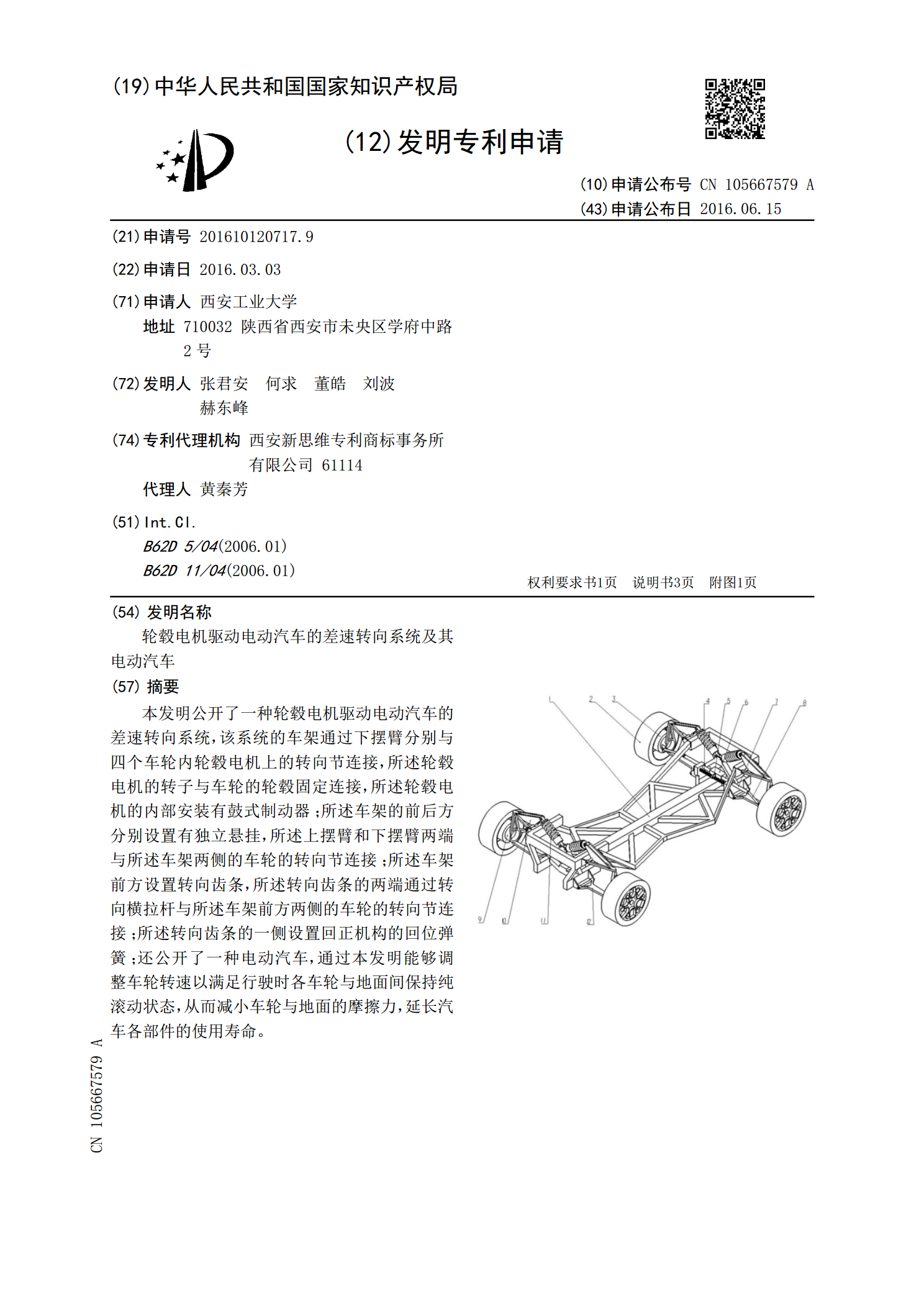
本发明公开了一种轮毂电机驱动电动汽车的差速转向系统,该系统的车架通过下摆臂分别与四个车轮内轮毂电机上的转向节连接,所述轮毂电机的转子与车轮的轮毂固定连接,所述轮毂电机的内部安装有鼓式制动器;所述车架的前后方分别设置有独立悬挂,所述上摆臂和下摆臂两端与所述车架两侧的车轮的转向节连接;所述车架前方设置转向齿条,所述转向齿条的两端通过转向横拉杆与所述车架前方两侧的车轮的转向节连接;所述转向齿条的一侧设置回正机构的回位弹簧;还公开了一种电动汽车,通过本发明能够调整车轮转速以满足行驶时各车轮与地面间保持纯滚动状态,
一种电动汽车、轮毂电机及轮毂电机电子差速系统.pdf
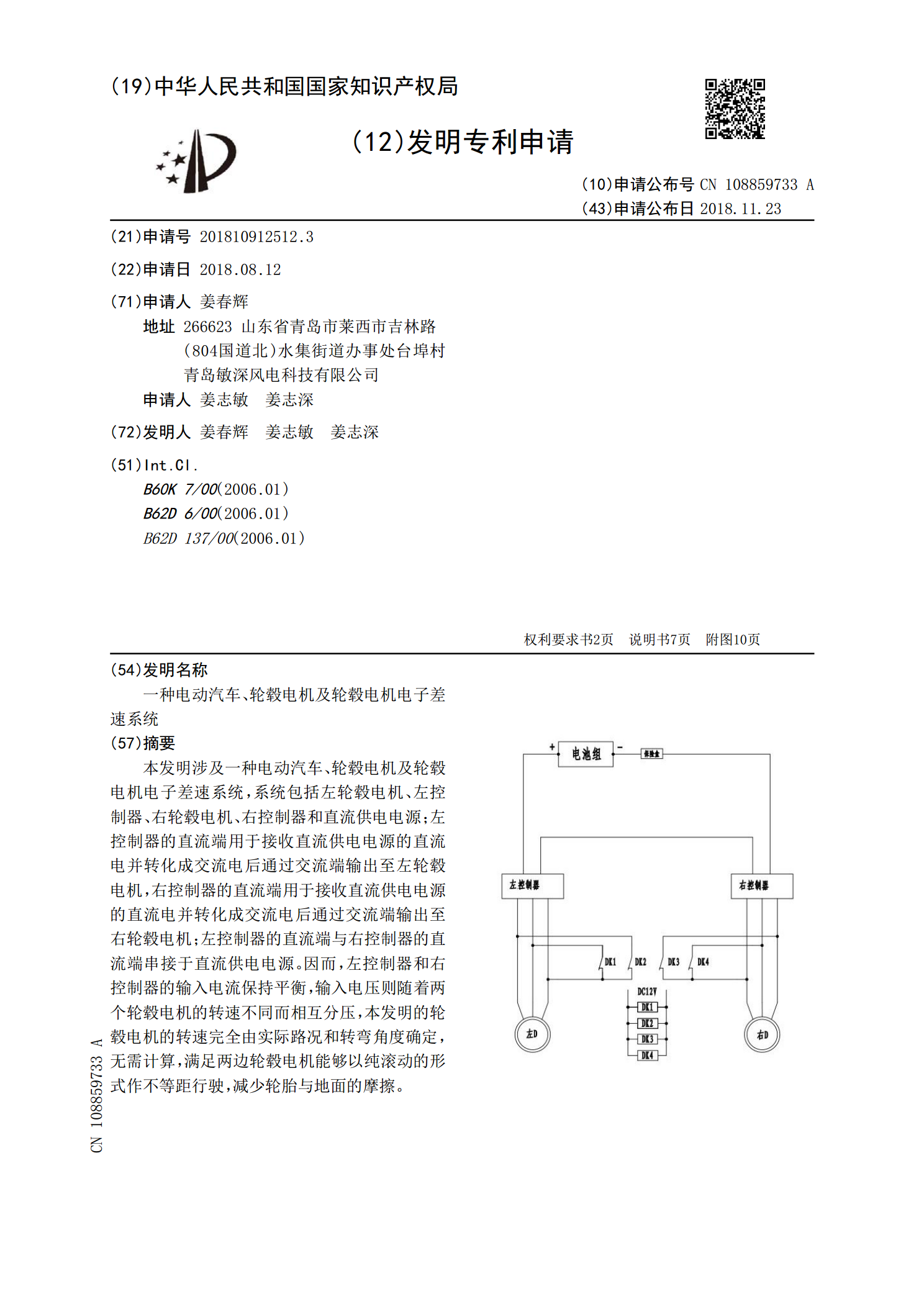
本发明涉及一种电动汽车、轮毂电机及轮毂电机电子差速系统,系统包括左轮毂电机、左控制器、右轮毂电机、右控制器和直流供电电源;左控制器的直流端用于接收直流供电电源的直流电并转化成交流电后通过交流端输出至左轮毂电机,右控制器的直流端用于接收直流供电电源的直流电并转化成交流电后通过交流端输出至右轮毂电机;左控制器的直流端与右控制器的直流端串接于直流供电电源。因而,左控制器和右控制器的输入电流保持平衡,输入电压则随着两个轮毂电机的转速不同而相互分压,本发明的轮毂电机的转速完全由实际路况和转弯角度确定,无需计算,满足

电动汽车用四轮毂电机驱动实现四轮转向的电子差速转向控制系统.pdf
一种电动汽车用四轮毂电机驱动实现四轮转向的电子差速转向控制系统,首先定义L为汽车轴距,B为汽车轮距,nfo为前外侧转向驱动轮转速,nfi为前内侧转向驱动轮转速,nro为后外侧转向驱动轮转速,nri为后内侧转向驱动轮转速,各车轮转弯的圆弧半径分别为Rfo、Rfi、Rro、Rri;设定nfo为参考标定转速,nfo为加速踏板的车速指令;l为转弯圆心o到前车轮轴心的车身纵向距离,r为转弯圆心o到内侧车轮中心的车身横向距离,根据各车轮的偏转角信号和控制模式,按差速计算公式计算出对各车轮转速的要求值,输入到各车轮轮毂