
车辆状态跟踪方法、系统、计算机及可读存储介质.pdf

依波****bc

1/10

2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆状态跟踪方法、系统、计算机及可读存储介质.pdf
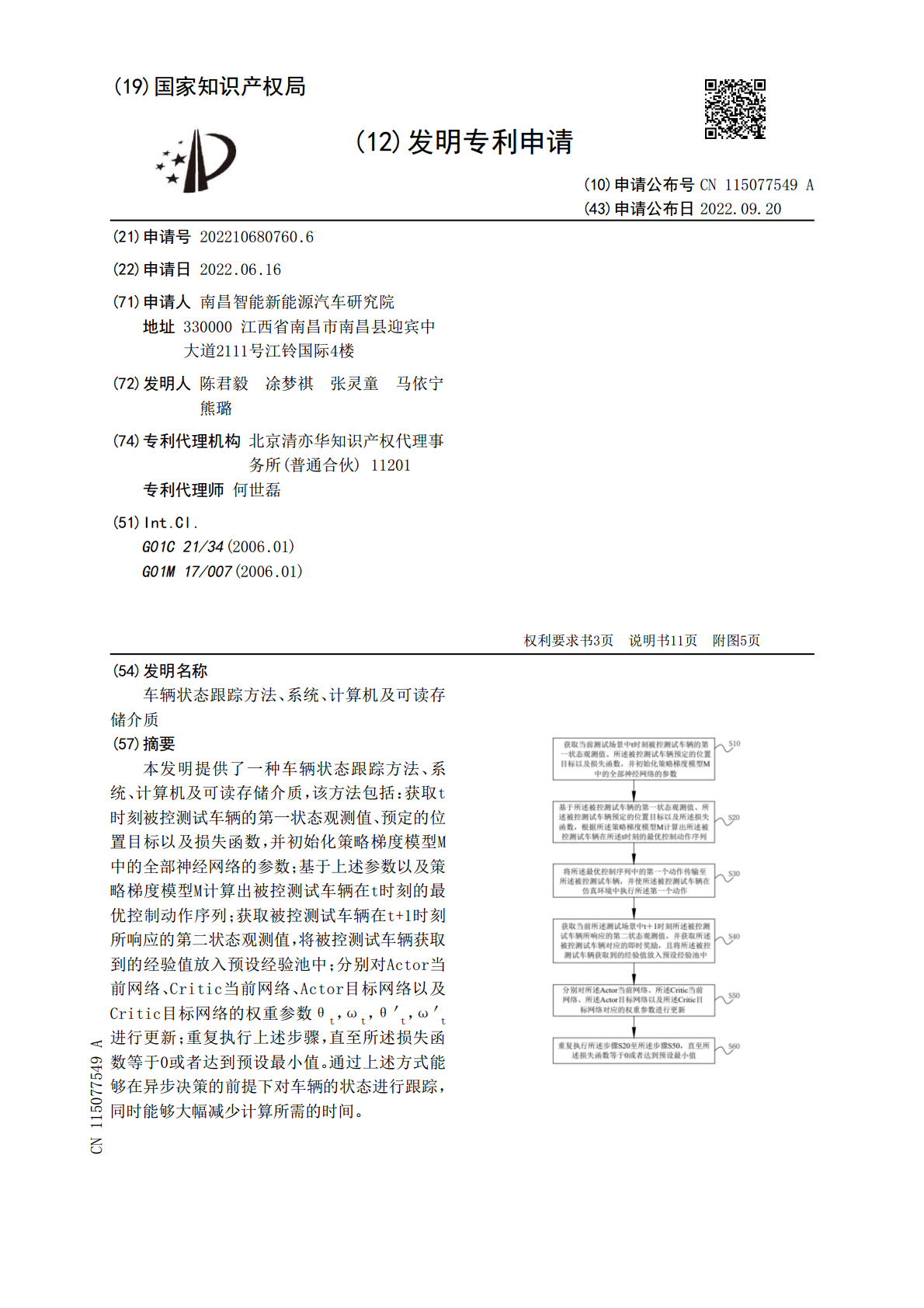
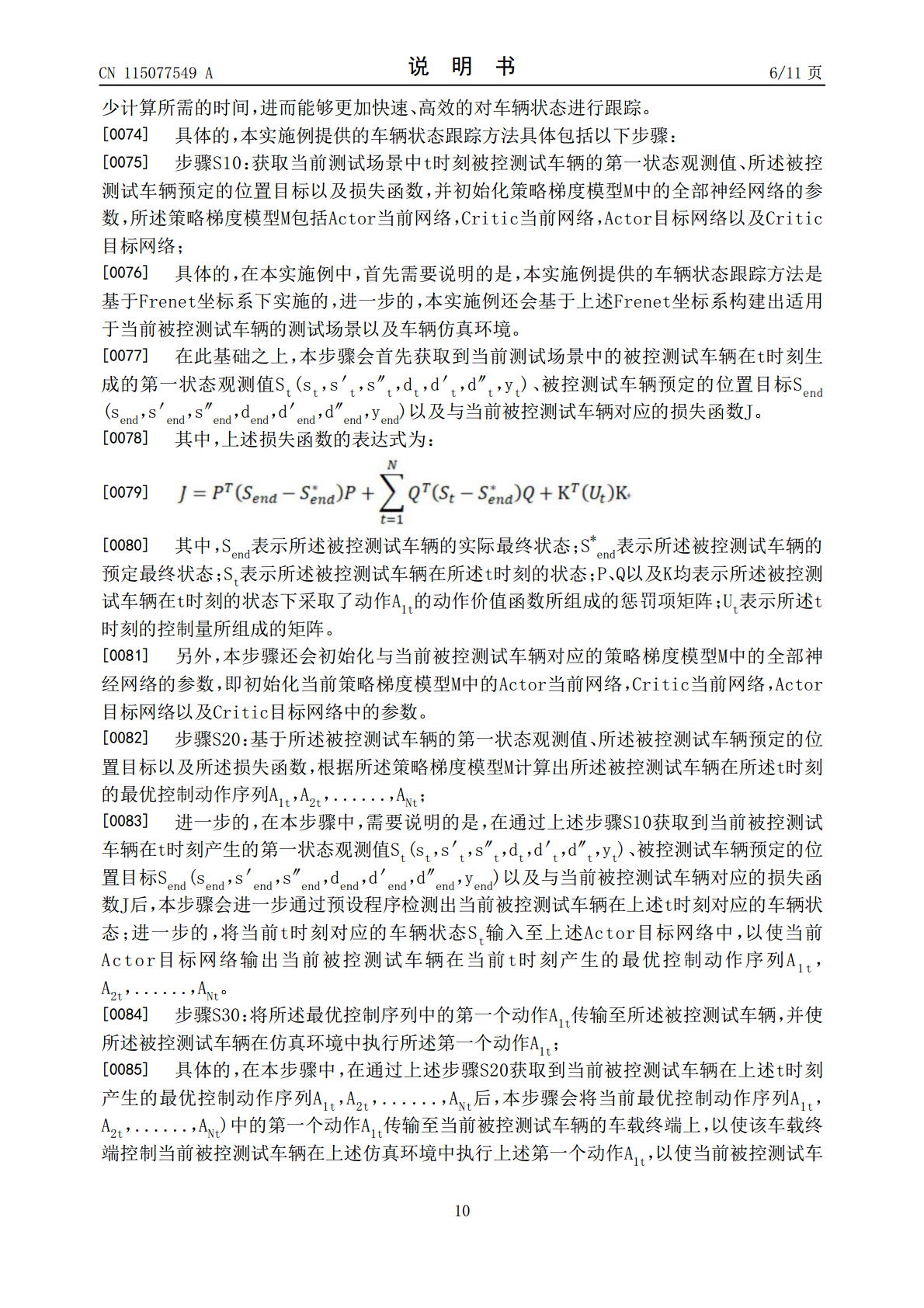
本发明提供了一种车辆状态跟踪方法、系统、计算机及可读存储介质,该方法包括:获取t时刻被控测试车辆的第一状态观测值、预定的位置目标以及损失函数,并初始化策略梯度模型M中的全部神经网络的参数;基于上述参数以及策略梯度模型M计算出被控测试车辆在t时刻的最优控制动作序列;获取被控测试车辆在t+1时刻所响应的第二状态观测值,将被控测试车辆获取到的经验值放入预设经验池中;分别对Actor当前网络、Critic当前网络、Actor目标网络以及Critic目标网络的权重参数θ<base:Sub>t</base:Sub>,
车辆的定位方法、系统、设备及计算机可读存储介质.pdf
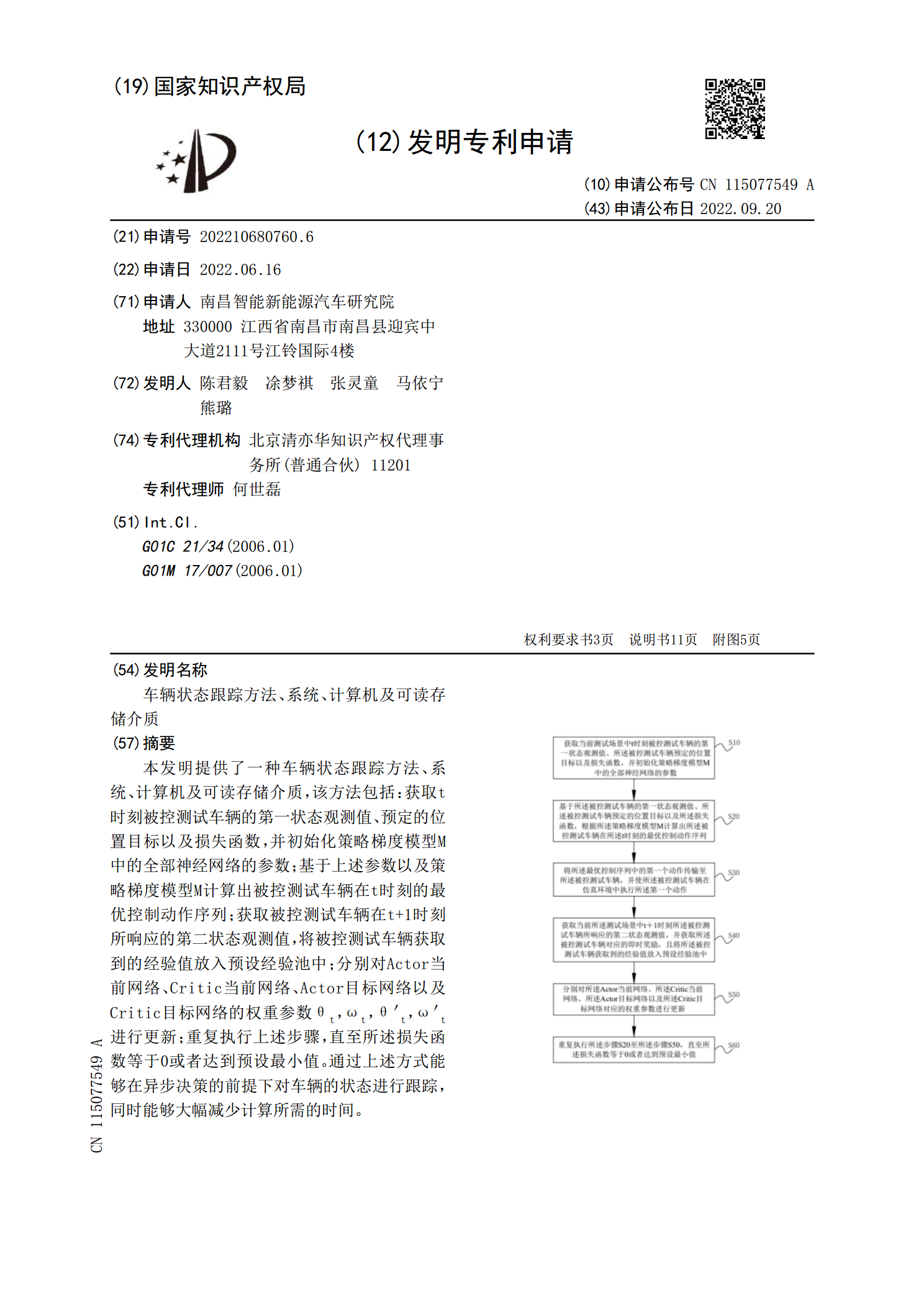
本发明提供一种车辆的定位方法、系统、设备及计算机可读存储介质,所述车辆的定位方法包括:获取车辆的当前地理信息,通过车辆的当前地理信息查找并确定该车辆待进入的停车区域的地图数据;在车辆进入所述停车区域时,获取该停车区域的全景影像数据;从所述停车区域的全景影像数据中提取特征信息,将所提取的特征信息与停车区域的地图数据进行匹配定位,以获取车辆于停车区域的地图数据中的位姿数据;将实时推算的车辆的里程定位数据作为预测输入,利用车辆于停车区域的地图数据中的位姿数据来更新求解车辆于地图坐标系下的位姿。本发明场景适应性强

车辆的定位方法、系统、设备及计算机可读存储介质.pdf
本发明提供一种车辆的定位方法、系统、设备及计算机可读存储介质,定位方法包括:实时获取车辆于多个时刻的位姿;将实时获取的多个时刻的位姿定义为观测数据依次接收至预先构建的校正模型,其中,预设校正模型包括若干用于预测车辆位姿的滤波器;在当前时刻预先构建的校正模型接收到第i+1个观测数据时,对前i个滤波器分别进行融合检测,若前i个滤波器中的滤波器检测通过,则利用第i+1个观测数据,更新检测通过的滤波器,并提取出校正后的车辆于当前时刻的位姿;第i+1个观测数据非第一个观测数据。本发明适用于任何有车位号的停车场,且通
泊车方法、系统、可读存储介质及车辆.pdf
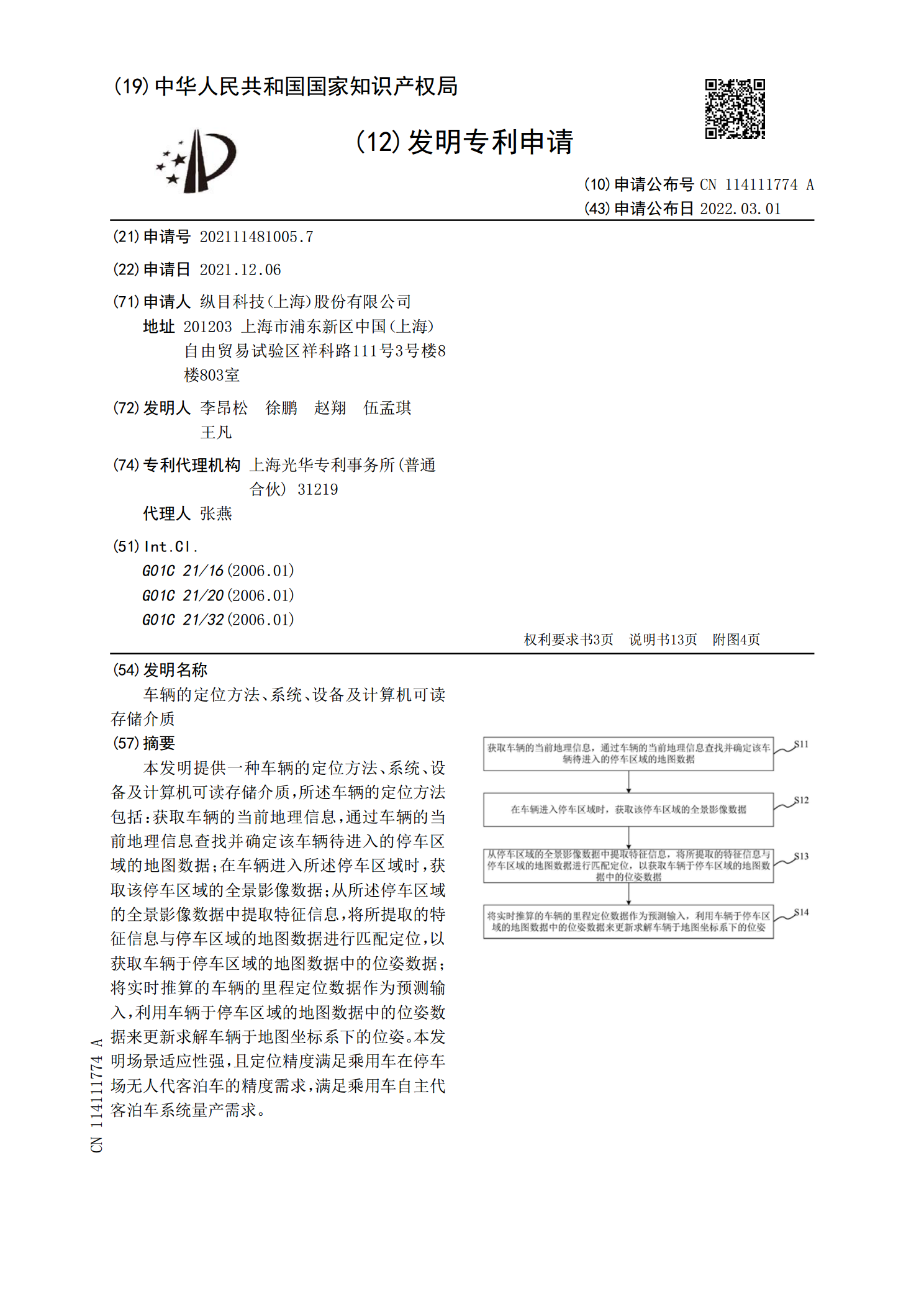
本发明提出一种泊车方法、系统、可读存储介质及车辆,应用于泊车辅助系统,该方法包括:获取目标车辆的自动泊车请求,并根据所述自动泊车请求搜索可泊车位;按预设倒车路线控制所述目标车辆开始倒入所述可泊车位,所述预设倒车路线为根据垂直式标准车位制定,并判断所述目标车辆在预设区域内是否存在障碍物;若是则对障碍物进行扫描以获取多个点数据,并根据多个点数据拟合出所述可泊车位的轮廓;根据所述可泊车位的轮廓生成新的倒车路线,并控制所述目标车辆按照新的倒车路线完成泊车。本发明提出的泊车方法,能够完成各种异形车位的泊车入位,扩大
车辆跟踪方法、装置、计算机可读存储介质及电子设备.pdf
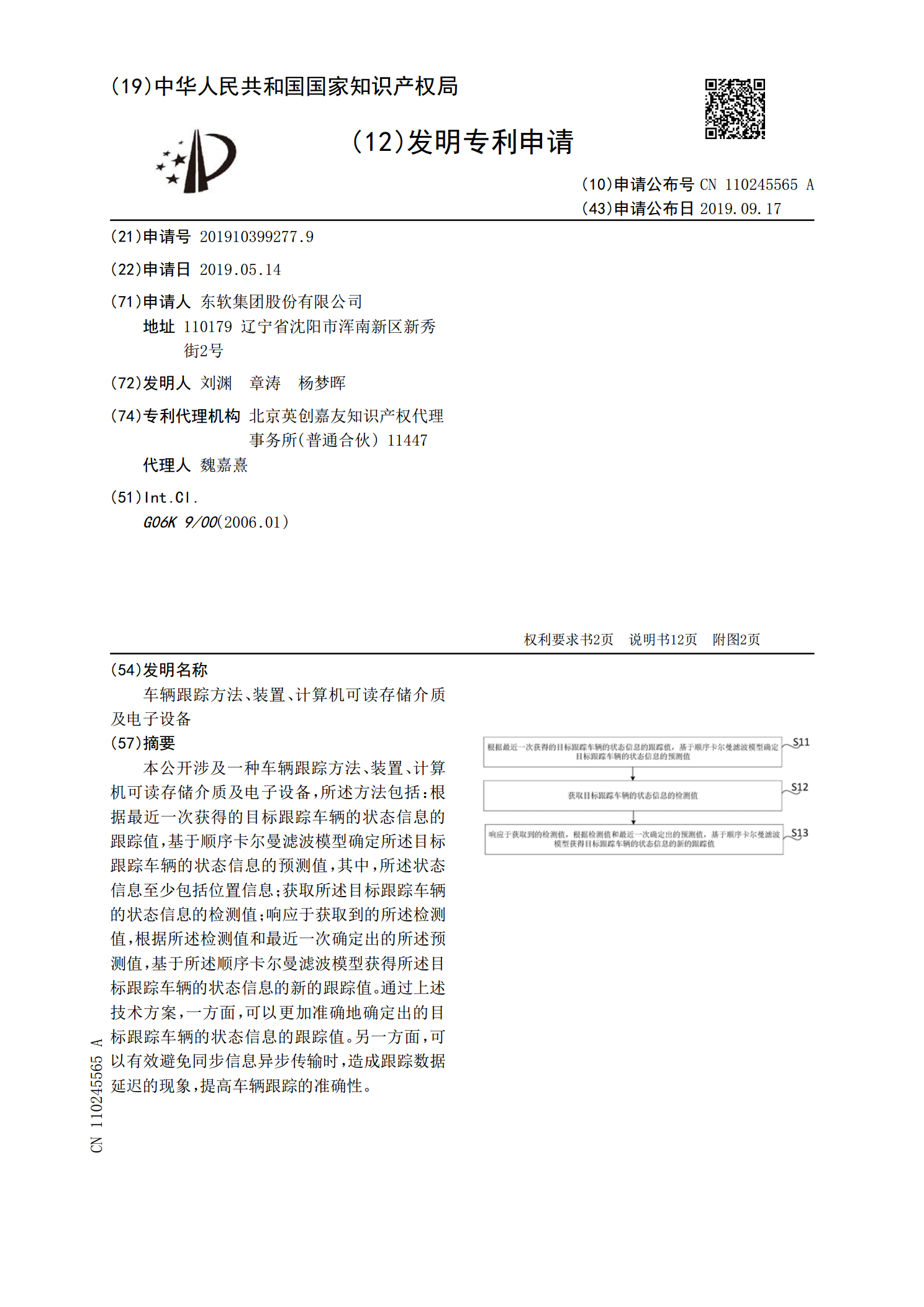
本公开涉及一种车辆跟踪方法、装置、计算机可读存储介质及电子设备,所述方法包括:根据最近一次获得的目标跟踪车辆的状态信息的跟踪值,基于顺序卡尔曼滤波模型确定所述目标跟踪车辆的状态信息的预测值,其中,所述状态信息至少包括位置信息;获取所述目标跟踪车辆的状态信息的检测值;响应于获取到的所述检测值,根据所述检测值和最近一次确定出的所述预测值,基于所述顺序卡尔曼滤波模型获得所述目标跟踪车辆的状态信息的新的跟踪值。通过上述技术方案,一方面,可以更加准确地确定出的目标跟踪车辆的状态信息的跟踪值。另一方面,可以有效避免同