
确定导航状态信息的方法、装置、设备、介质及自动驾驶车辆.pdf

英瑞****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

确定导航状态信息的方法、装置、设备、介质及自动驾驶车辆.pdf
本公开提供了一种确定导航状态信息的方法、装置、设备、介质及自动驾驶车辆,涉及导航技术领域,尤其涉及自动驾驶和人工智能技术领域。具体实现方案包括:对N+1个时刻内的GNSS的量测数据和IMU的量测数据进行前向卡尔曼滤波,解算得到各时刻分别对应的前向滤波方差和前向状态值;对前向滤波方差分别进行平滑处理;对GNSS的量测数据和IMU的量测数据进行后向卡尔曼滤波,解算得到各时刻分别对应的后向滤波方差和后向状态值;对后向滤波方差分别进行平滑处理;根据平滑后的前向滤波方差和平滑后的后向滤波方差,对前向状态值和后向状态

车辆状态的确定方法、装置、设备和存储介质.pdf
本申请提供一种车辆状态的确定方法、装置、设备和存储介质,其中,车辆包括集卡,该集卡包括挂车和牵引车,该集卡上安设有可扫描到挂车的雷达,该车辆状态的确定方法包括:获取雷达采集的点云数据,根据雷达的安装位置及挂车的结构参数,在点云数据中提取目标区域的点云数据,之后根据目标区域的点云数据,确定集卡的当前状态,当前状态包括挂车相对于牵引车的角度,和/或,挂车上的集装箱状态。该技术方案中,通过在雷达采集挂车处的点云数据,并对点云数据进行处理,以低成本确定集卡的状态。
一种自动驾驶车辆行驶策略确定方法、装置、设备及介质.pdf
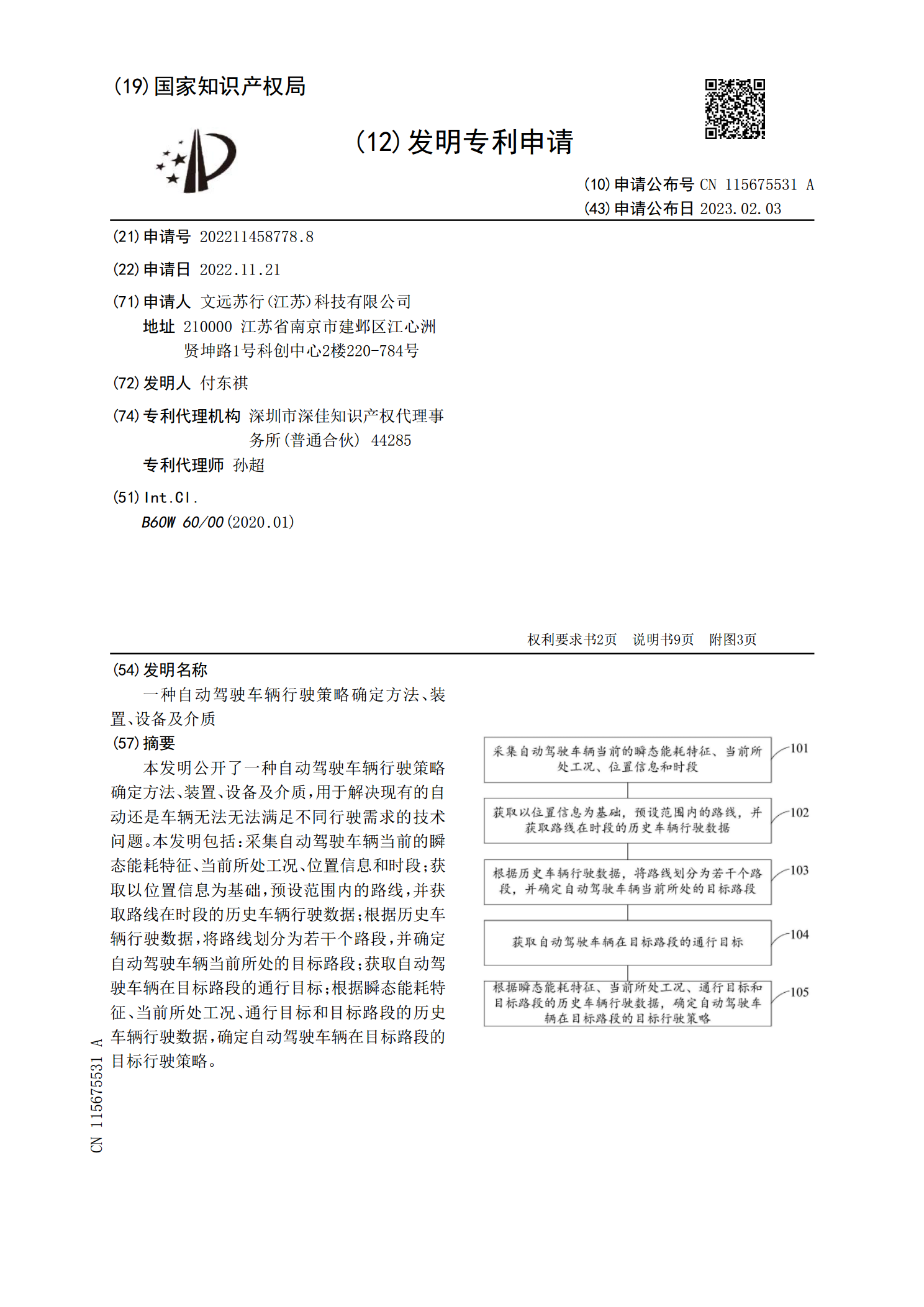
本发明公开了一种自动驾驶车辆行驶策略确定方法、装置、设备及介质,用于解决现有的自动还是车辆无法无法满足不同行驶需求的技术问题。本发明包括:采集自动驾驶车辆当前的瞬态能耗特征、当前所处工况、位置信息和时段;获取以位置信息为基础,预设范围内的路线,并获取路线在时段的历史车辆行驶数据;根据历史车辆行驶数据,将路线划分为若干个路段,并确定自动驾驶车辆当前所处的目标路段;获取自动驾驶车辆在目标路段的通行目标;根据瞬态能耗特征、当前所处工况、通行目标和目标路段的历史车辆行驶数据,确定自动驾驶车辆在目标路段的目标行驶策
车辆行驶状态的控制方法、装置、设备及自动驾驶车辆.pdf
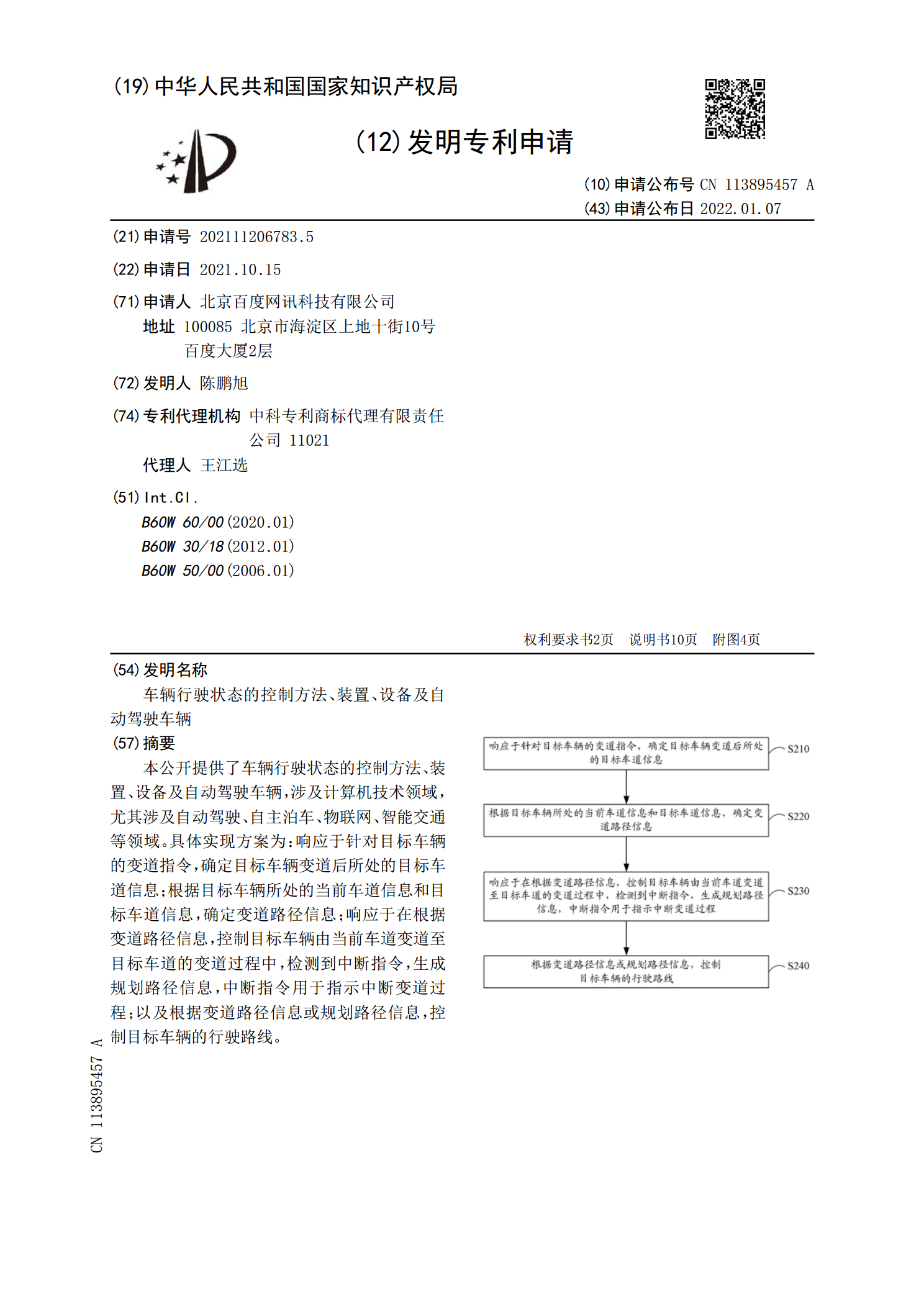
本公开提供了车辆行驶状态的控制方法、装置、设备及自动驾驶车辆,涉及计算机技术领域,尤其涉及自动驾驶、自主泊车、物联网、智能交通等领域。具体实现方案为:响应于针对目标车辆的变道指令,确定目标车辆变道后所处的目标车道信息;根据目标车辆所处的当前车道信息和目标车道信息,确定变道路径信息;响应于在根据变道路径信息,控制目标车辆由当前车道变道至目标车道的变道过程中,检测到中断指令,生成规划路径信息,中断指令用于指示中断变道过程;以及根据变道路径信息或规划路径信息,控制目标车辆的行驶路线。

车辆自动驾驶方法、装置、设备及存储介质.pdf
本申请公开了一种车辆自动驾驶方法、装置、设备及存储介质,涉及自动驾驶技术领域,可应用于港口、口岸、公路货运、城市配送、矿山、机场等业务场景,包括:获取车辆转弯时车头与牵引车形成的转弯夹角,比较转弯夹角与预设夹角之间的相对大小关系,以此从多个映射关系中选择确定当前盲区的区域范围采用的目标映射关系,再根据转弯夹角、牵引车尺寸和后向传感器的安装位置,通过目标映射关系确定出当前盲区的区域范围,并判断当前盲区的区域范围内是否存在目标,采取相应的避障驾驶策略控制车辆行驶。该方法降低了转弯时若有物体进入盲区,而传感器无