
一种行走装置、底盘及可移动平台.pdf

雨星****萌娃


1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种行走装置、底盘及可移动平台.pdf
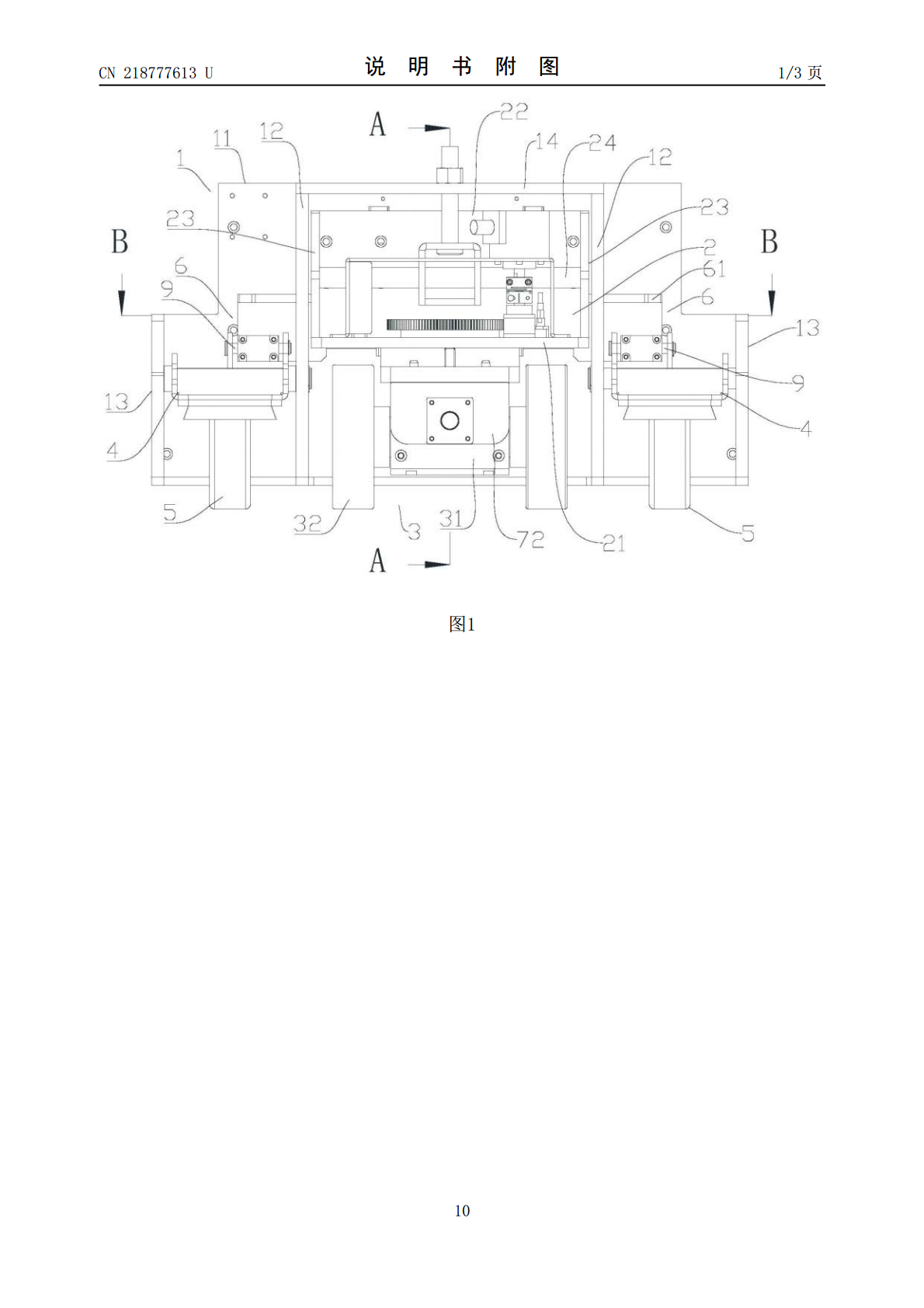
本实用新型涉及一种行走装置、底盘及可移动平台,包括第一安装架、主动行走机构、从动行走机构和传力组件;主动行走机构包括第二安装架和主动行走组件,第二安装架安装于第一安装架上,主动行走组件安装于第二安装架上;从动行走机构包括第三安装架和从动行走组件,第三安装架安装于第一安装架上,从动行走组件安装于第三安装架上;传力组件连接第二安装架和第三安装架;主动行走组件和/或从动行走组件在行走遇到异常地面时,带动安装在的第二安装架和/或第三安装架运动,运动产生的力通过传力组件在第二安装架和第三安装架之间传递,带动主动行走
可移动平台的控制方法、装置、可移动平台及存储介质.pdf
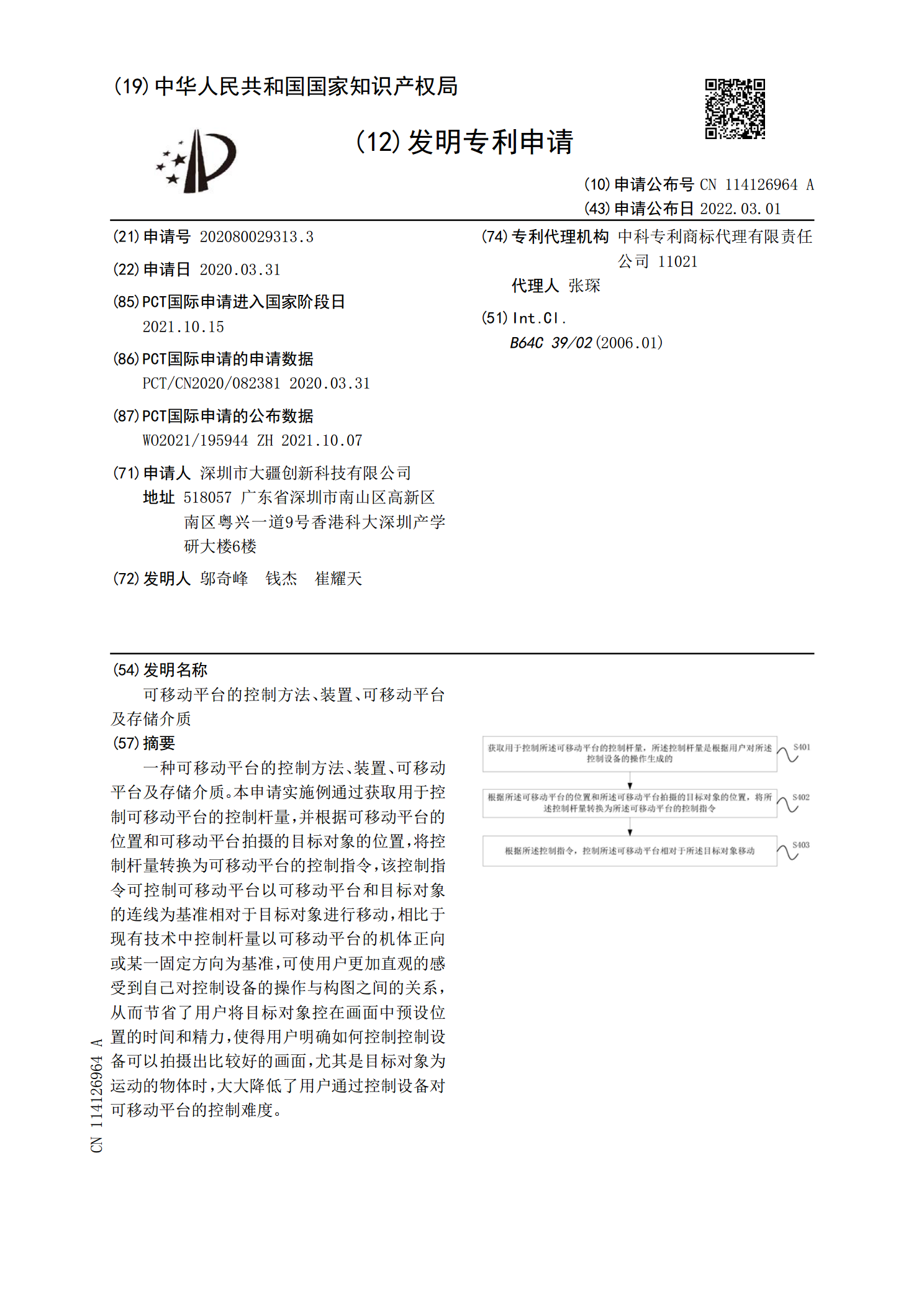
一种可移动平台的控制方法、装置、可移动平台及存储介质。本申请实施例通过获取用于控制可移动平台的控制杆量,并根据可移动平台的位置和可移动平台拍摄的目标对象的位置,将控制杆量转换为可移动平台的控制指令,该控制指令可控制可移动平台以可移动平台和目标对象的连线为基准相对于目标对象进行移动,相比于现有技术中控制杆量以可移动平台的机体正向或某一固定方向为基准,可使用户更加直观的感受到自己对控制设备的操作与构图之间的关系,从而节省了用户将目标对象控在画面中预设位置的时间和精力,使得用户明确如何控制控制设备可以拍摄出比较
可移动平台的控制方法、装置、可移动平台及存储介质.pdf
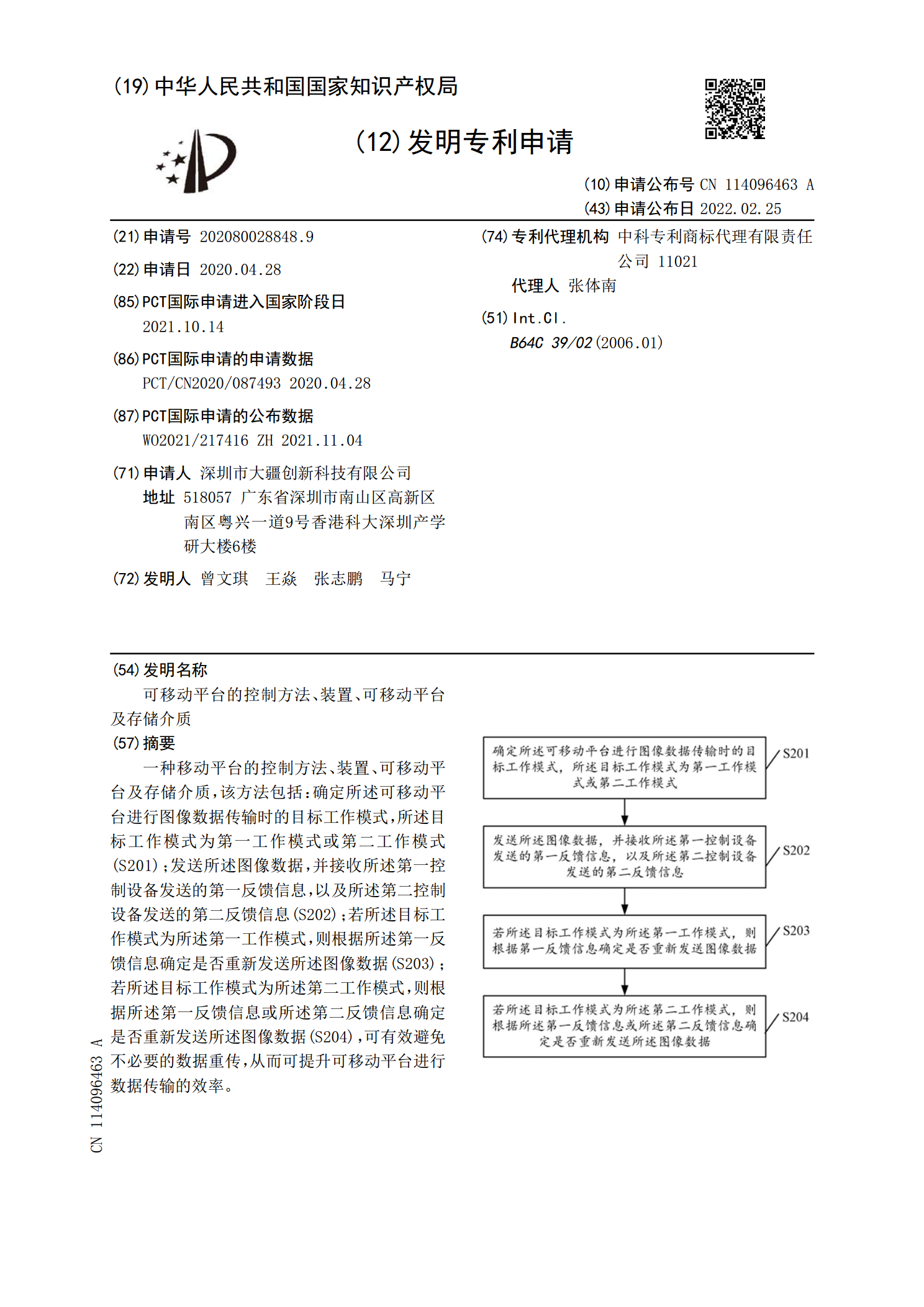
一种移动平台的控制方法、装置、可移动平台及存储介质,该方法包括:确定所述可移动平台进行图像数据传输时的目标工作模式,所述目标工作模式为第一工作模式或第二工作模式(S201);发送所述图像数据,并接收所述第一控制设备发送的第一反馈信息,以及所述第二控制设备发送的第二反馈信息(S202);若所述目标工作模式为所述第一工作模式,则根据所述第一反馈信息确定是否重新发送所述图像数据(S203);若所述目标工作模式为所述第二工作模式,则根据所述第一反馈信息或所述第二反馈信息确定是否重新发送所述图像数据(S204),可

行走装置及运动底盘.pdf
本发明公开了一种行走装置及运动底盘,行走装置包括:行走轮,行走轮具有轮面;多个变形块,多个变形块沿周向布置且可枢转地设在行走轮上,每个变形块具有枢转部,且每个变形块具有第一状态和第二状态;其中,第一状态时变形块位于轮面的内侧;第二状态时变形块至少部分伸出轮面,变形块的伸出轮面的部分构成伸出部,伸出部为凸齿状,且沿行走轮的转动方向上伸出部位于枢转部的前方。本发明通过行走轮上设置多个变形块,每个变形块具有第一状态和第二状态,使得行走轮具备可切换的正常形态和越野形态,正常形态下行走轮以较高速度行驶,越野形态下行

一种机器人行走底盘装置.pdf
本发明提供一种机器人行走底盘装置,包括行走底盘装置本体,所述行走底盘装置本体包括托台、升降仓、缓冲锁定组件和抬升机构,所述托台的底部一端安装有前驱动轮,所述托台底部的另一端安装有后辅助轮,所述前驱动轮的内侧设置有驱动系统,且该驱动系统与上方的机器人本体的控制系统部分相连接,所述托台的顶部安装有升降仓,该机器人行走底盘装置在后辅助轮的内侧加装有抬升机构,利用该结构将支撑滚筒向下压,即可将后辅助轮顶部的托台区域向上翘起,即可提高斜面上行走的稳定性,将抬升机构和缓冲锁定组件进行整合,通过整合后的结构即可实现不同