
一种水下清洁设备的移动方法.pdf

fu****级甜

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水下清洁设备的移动方法.pdf
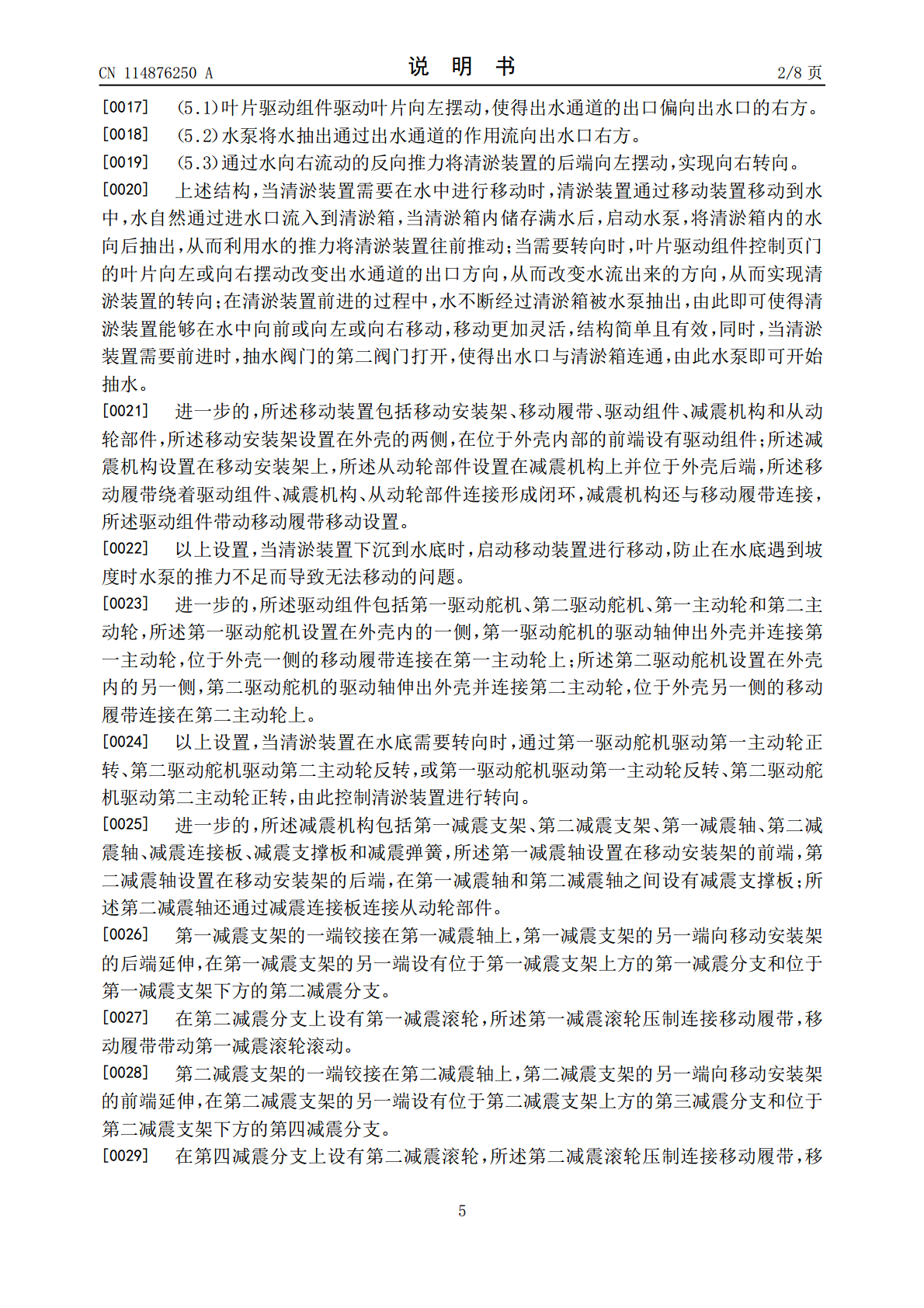
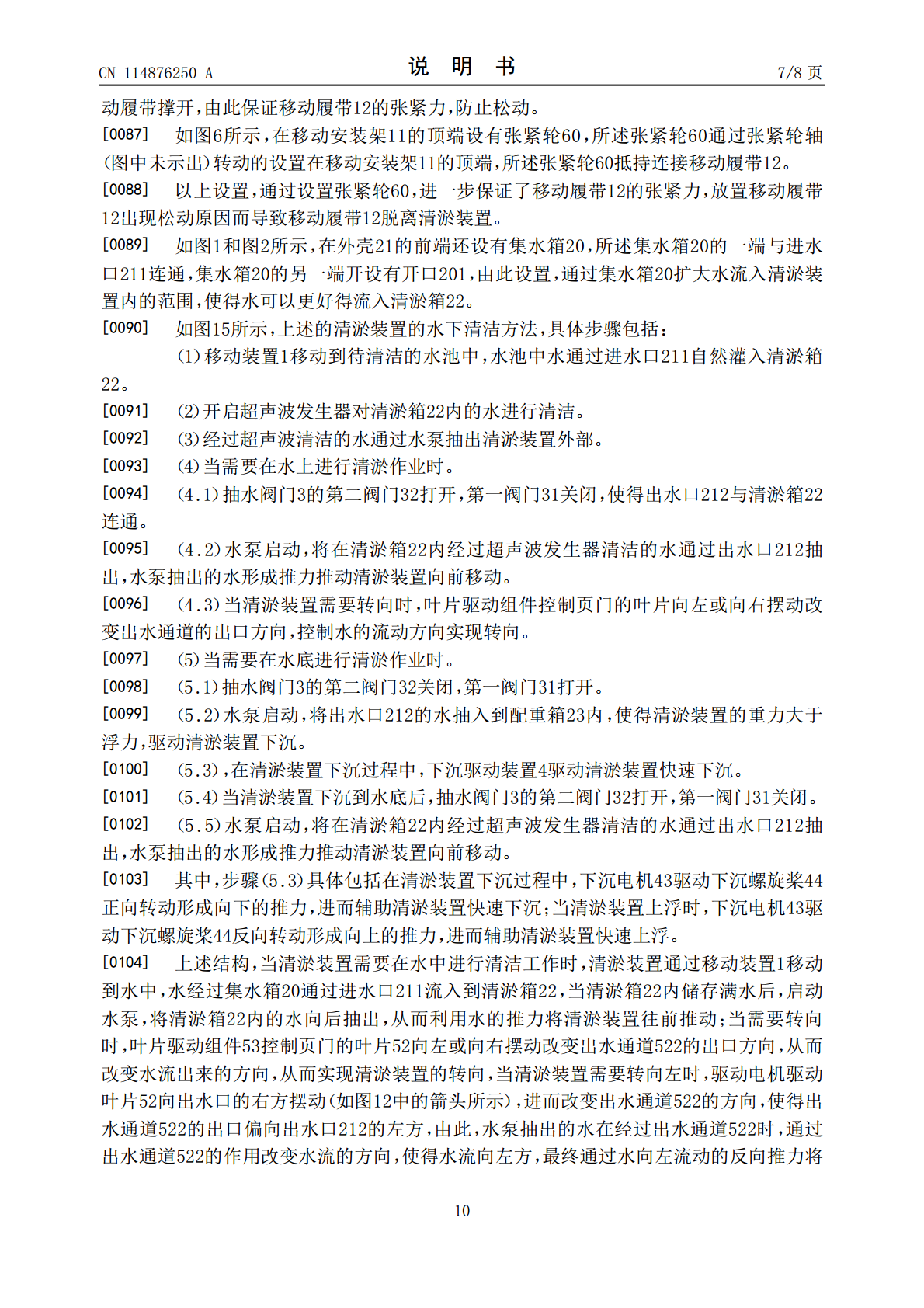
本发明提供一种水下清洁设备的移动方法,具体步骤包括:(1)移动装置移动到水中,水通过进水口自然灌入清淤箱;(2)抽水阀门与清淤箱连通;(3)水泵启动将在清淤箱内的水通过出水口抽出形成推力推动清淤装置向前移动;(4)当清淤装置需要向左转向时;(4.1)叶片驱动组件驱动叶片向右摆动,使得出水通道的出口偏向左方;(4.2)水流向出水口左方;(4.3)通过水流动的反向推力将清淤装置的后端向右摆动,实现向左转向;(5)当清淤装置需要向右转向时;(5.1)叶片驱动组件驱动叶片向左摆动,使得出水通道的出口偏向右方;(5
一种水下清洁设备的结构及其控制方法.pdf
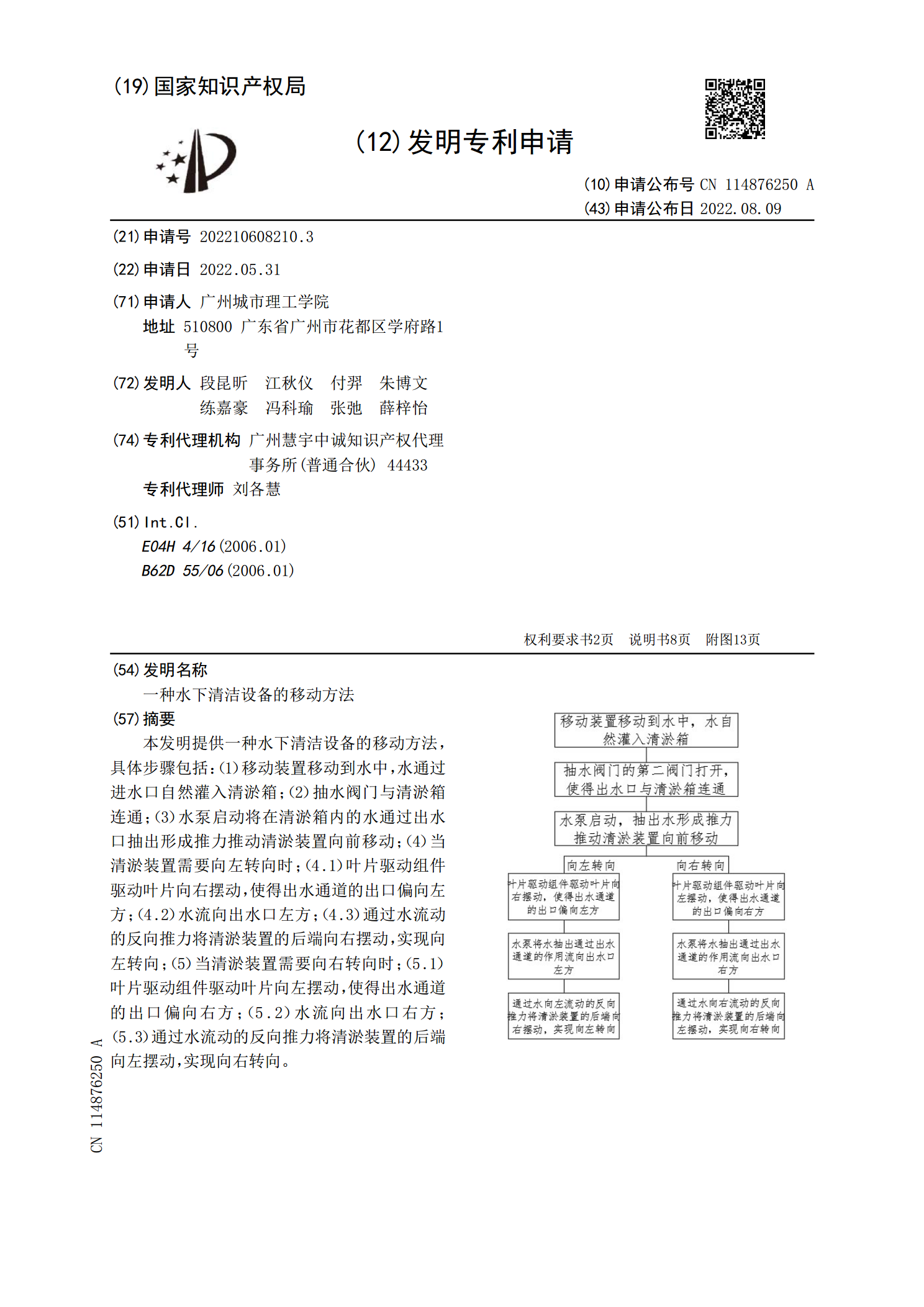
本发明公开了一种水下清洁设备的结构及其控制方法。更具权利要求书要求1所述的水下清洁设备的结构,其特征在于:包括左右对称的并且可旋转的L型导流管、底部进水口、滚刷、明轮、垃圾收纳盒、万向轮、定向轮、转动机构、水泵涡轮、分流管道。更具权利要求书要求5所述的水下清洁设备的控制方法,其特征在于:通过分别调节左右L型导流管的朝向和控制左右L型导流管喷出水流的流速来控制水下清洁设备的各种运动姿态。本发明提高了水下清洁设备的清洁效率,降低了设备成本,提升了设备内部使用空间,提升了设备的使用寿命。

一种水下移动平台导航方法以及水下移动平台导航装置.pdf
本申请提供了一种水下移动平台导航方法。所述水下移动平台导航方法包括:获取捷联式惯性导航系统生成的第一导航信息;获取多普勒速度声呐系统生成的第二导航信息;获取北斗卫星导航系统或者磁罗盘系统生成的修正导航信息;根据第一导航信息以及第二导航信息生成第一融合导航信息;根据第一融合导航信息以及修正导航信息生成第二融合导航信息;根据第二融合导航信息生成导航控制信息;根据导航控制信息控制水下移动平台运动。本申请的水下移动平台导航方法通过组合导航技术进行修正误差的辅助导航技术,旨在采用高精度的导航技术对SINS随时间累积
一种水下测量的设备与水下测量方法.pdf
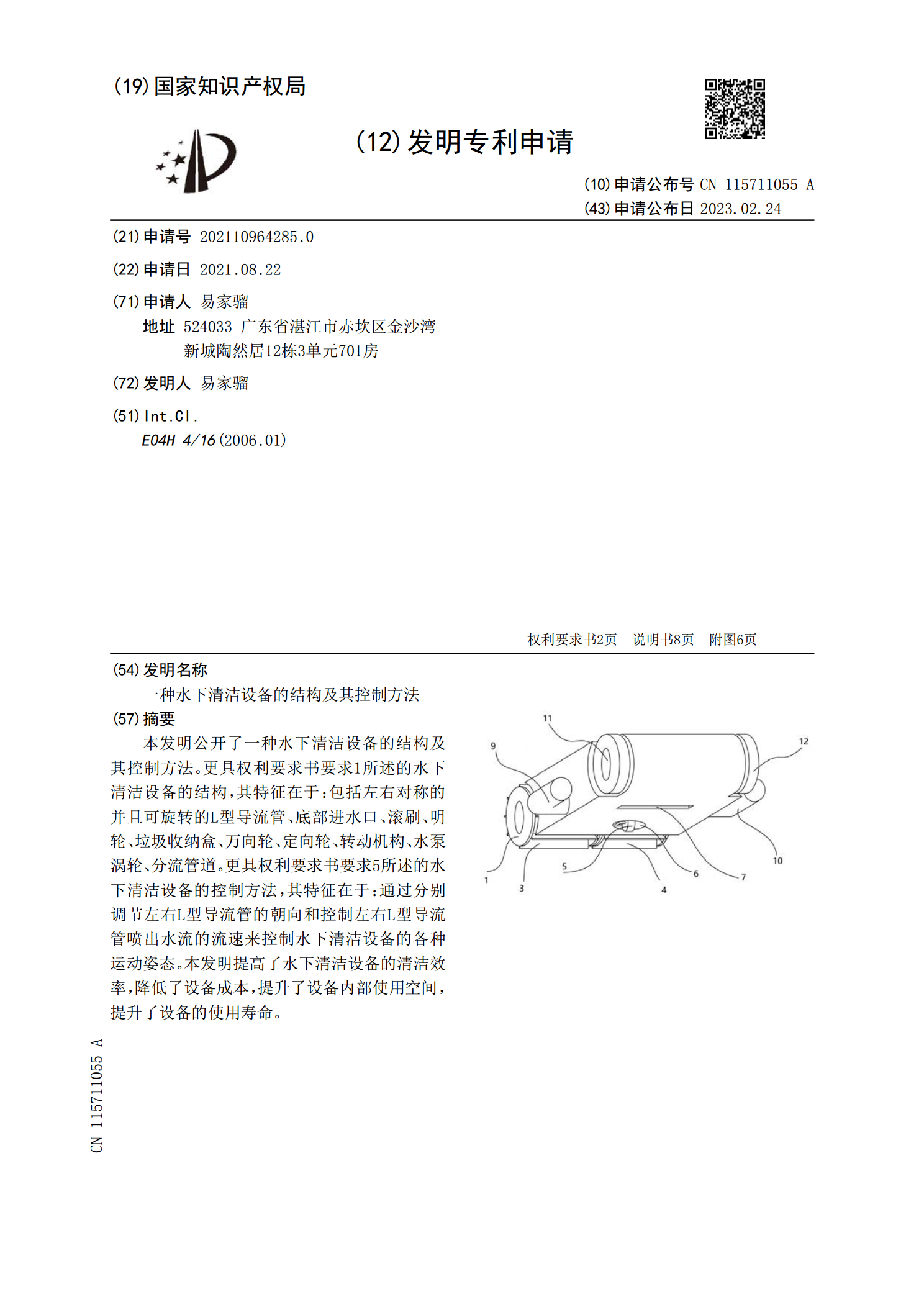
本发明涉及一种水下测量的设备与水下测量方法,该方法包括:数据准备、目标距离测量和目标尺寸测量。在数据准备阶段,首先在水中利用光学相机检测四束激光的光斑;然后根据四点光斑的位置对有角度偏转的图像进行校正;最后以四个光斑之间的像素作为输入,真实距离为标签,建立距离与像素之间的映射关系,构成数据集;在距离测量阶段,基于获得的数据集,建立幂函数回归模型实现测距;在目标尺寸测量阶段,基于图像人工辅助标记和小孔成像原理,测量目标尺寸大小,实现图像比例尺。本发明能够用于水下距离和目标尺寸测量,且无论目标是否有角度偏转;
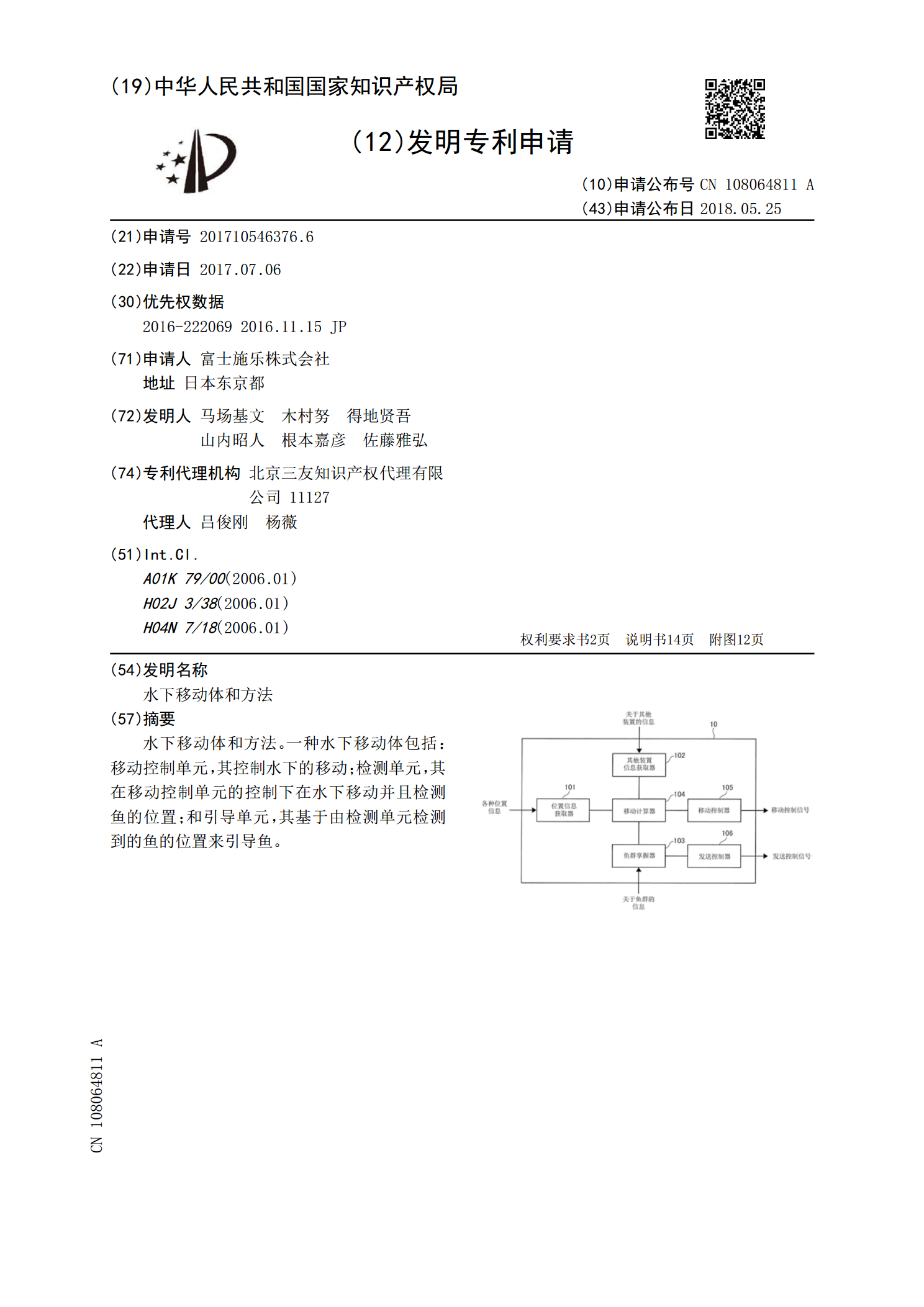
水下移动体和方法.pdf
水下移动体和方法。一种水下移动体包括:移动控制单元,其控制水下的移动;检测单元,其在移动控制单元的控制下在水下移动并且检测鱼的位置;和引导单元,其基于由检测单元检测到的鱼的位置来引导鱼。