
一种三维成像声呐点云的水下地形匹配定位方法及系统.pdf

玄静****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种三维成像声呐点云的水下地形匹配定位方法及系统.pdf
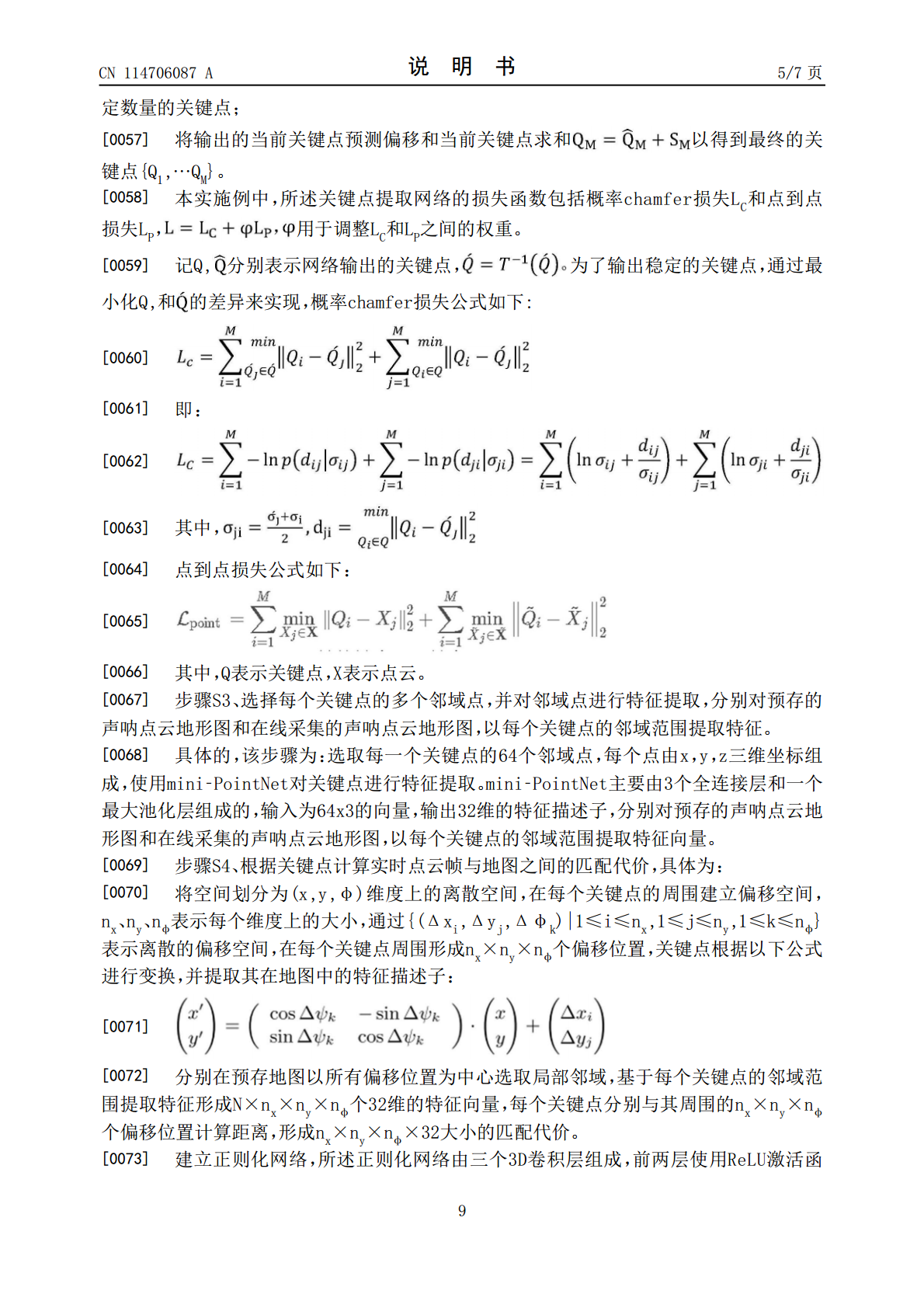
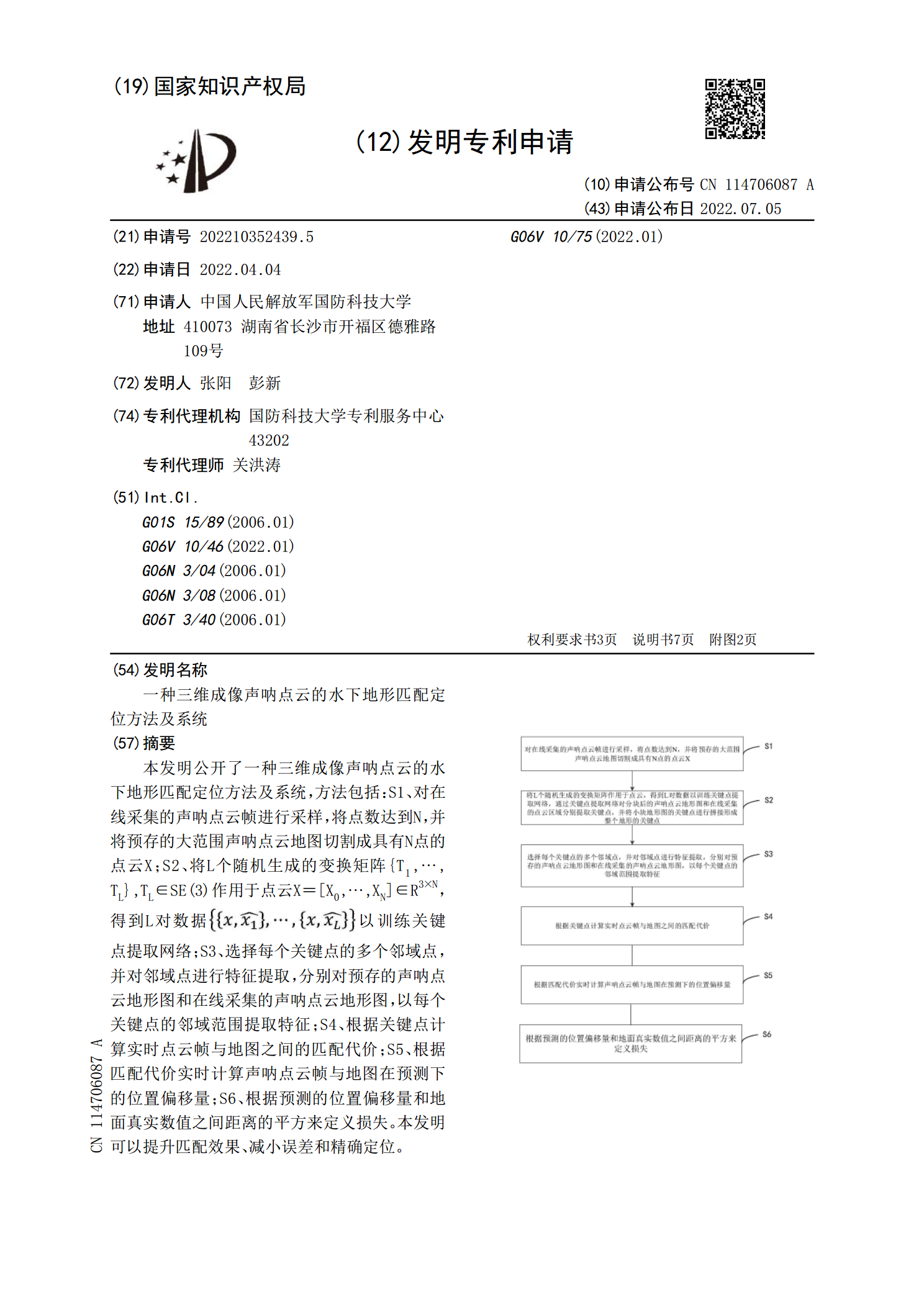
本发明公开了一种三维成像声呐点云的水下地形匹配定位方法及系统,方法包括:S1、对在线采集的声呐点云帧进行采样,将点数达到N,并将预存的大范围声呐点云地图切割成具有N点的点云X;S2、将L个随机生成的变换矩阵{T<base:Sub>1</base:Sub>,…,T<base:Sub>L</base:Sub>},T<base:Sub>L</base:Sub>∈SE(3)作用于点云X=[X<base:Sub>0</base:Sub>,…,X<base:Sub>N</base:Sub>]∈R<base:Sup>3

一种水下三维地形匹配定位导航声呐及导航方法.pdf
本发明公开了一种水下三维地形匹配定位导航声呐,包括控制系统、数据采集处理系统、多通道接收机、多通道稀疏平行接收线阵、多通道信号源、多通道发射机和多通道发射基阵;控制系统的输出端双向连接数据采集处理系统的输入端,数据采集处理系统的输出端分别连接多通道接收机和多通道信号源的输入端,解决了传统声呐地形探测效率低、信息量少、地形匹配的效率与准确率低、无法修正惯导和多普勒计程仪的累计误差,无法提高地形匹配定位导航算法的鲁棒性的问题。
一种声呐测量系统及三维成像声呐水下检测方法.pdf
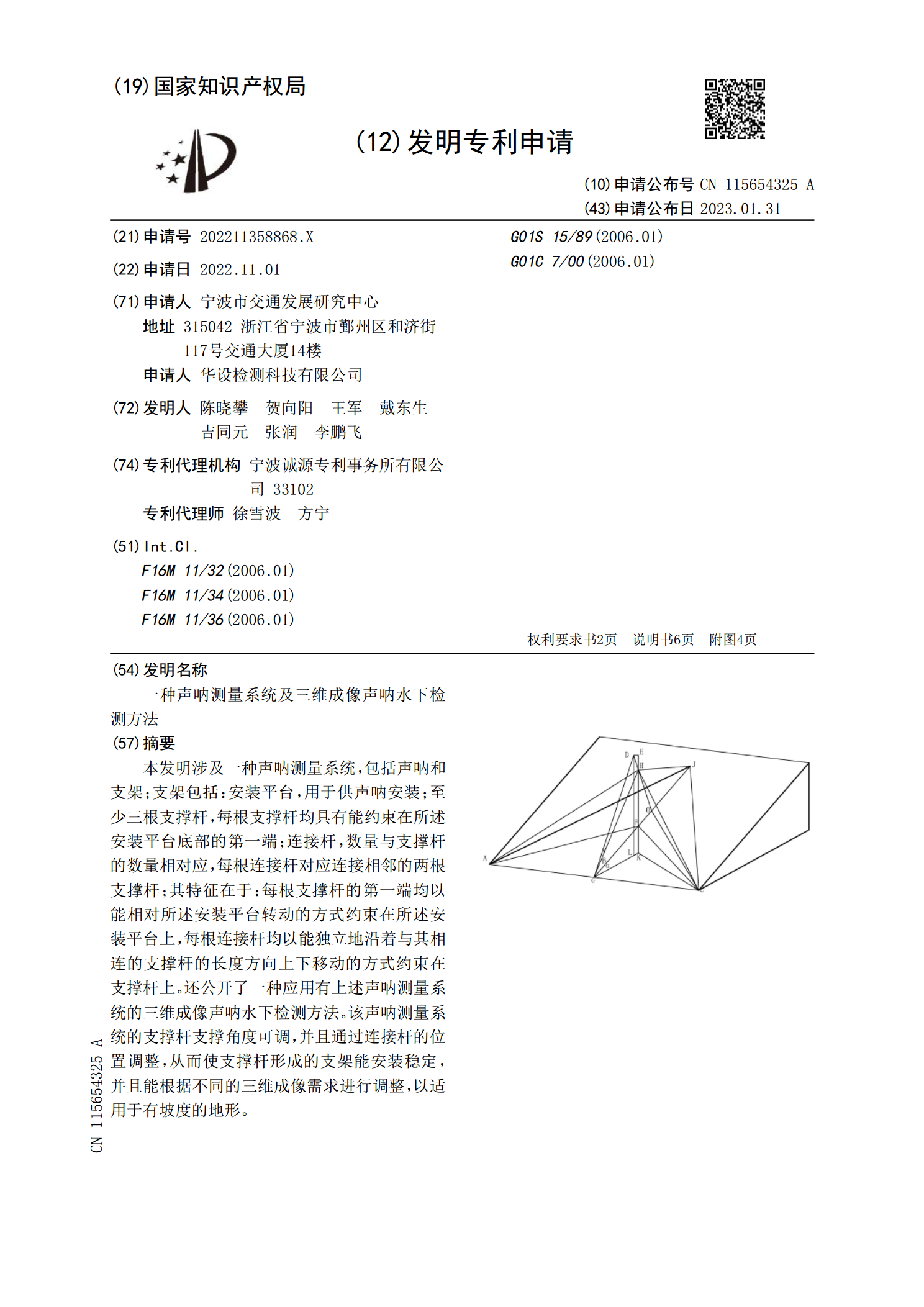
本发明涉及一种声呐测量系统,包括声呐和支架;支架包括:安装平台,用于供声呐安装;至少三根支撑杆,每根支撑杆均具有能约束在所述安装平台底部的第一端;连接杆,数量与支撑杆的数量相对应,每根连接杆对应连接相邻的两根支撑杆;其特征在于:每根支撑杆的第一端均以能相对所述安装平台转动的方式约束在所述安装平台上,每根连接杆均以能独立地沿着与其相连的支撑杆的长度方向上下移动的方式约束在支撑杆上。还公开了一种应用有上述声呐测量系统的三维成像声呐水下检测方法。该声呐测量系统的支撑杆支撑角度可调,并且通过连接杆的位置调整,从而

一种成像声呐检测水下平面形桥墩裂缝的测点布设方法.pdf
本发明涉及一种成像声呐检测水下平面形桥墩裂缝的测点布设方法。用于部署多个测点对桥墩平面裂缝进行完整检测。其中,检测桥墩对象为平面形桥墩;测点布设方法是基于声呐中心轴向正对桥墩平面的检测测位进行测点布设。所述测点布设方法中,当声呐和桥墩平面沿桥墩平面法向的距离保持不变时,能通过横向移动和竖向移动声呐布设多个测点,且保证相邻测点的波束范围相互覆盖以补偿各测点下无法检测到的盲区范围,从而实现对桥墩平面裂缝的完整检测。本发明能在完整检测平面桥墩裂缝的同时使得测点布设数量少,提高检测效率。
基于水下声呐定位的船舶清洗方法、系统及介质.pdf
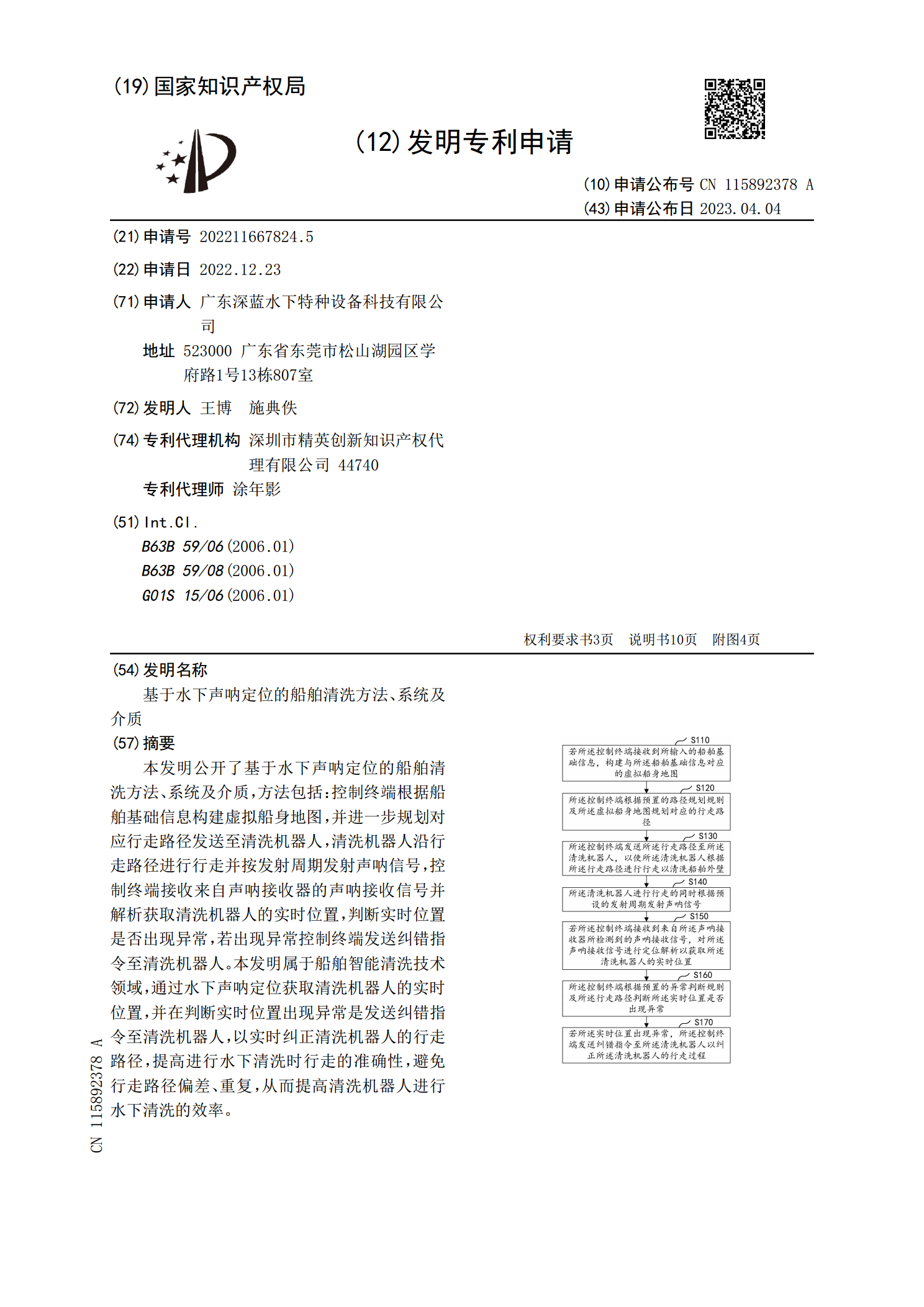
本发明公开了基于水下声呐定位的船舶清洗方法、系统及介质,方法包括:控制终端根据船舶基础信息构建虚拟船身地图,并进一步规划对应行走路径发送至清洗机器人,清洗机器人沿行走路径进行行走并按发射周期发射声呐信号,控制终端接收来自声呐接收器的声呐接收信号并解析获取清洗机器人的实时位置,判断实时位置是否出现异常,若出现异常控制终端发送纠错指令至清洗机器人。本发明属于船舶智能清洗技术领域,通过水下声呐定位获取清洗机器人的实时位置,并在判断实时位置出现异常是发送纠错指令至清洗机器人,以实时纠正清洗机器人的行走路径,提高进