
一种声呐测量系统及三维成像声呐水下检测方法.pdf

盼易****君a


1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种声呐测量系统及三维成像声呐水下检测方法.pdf
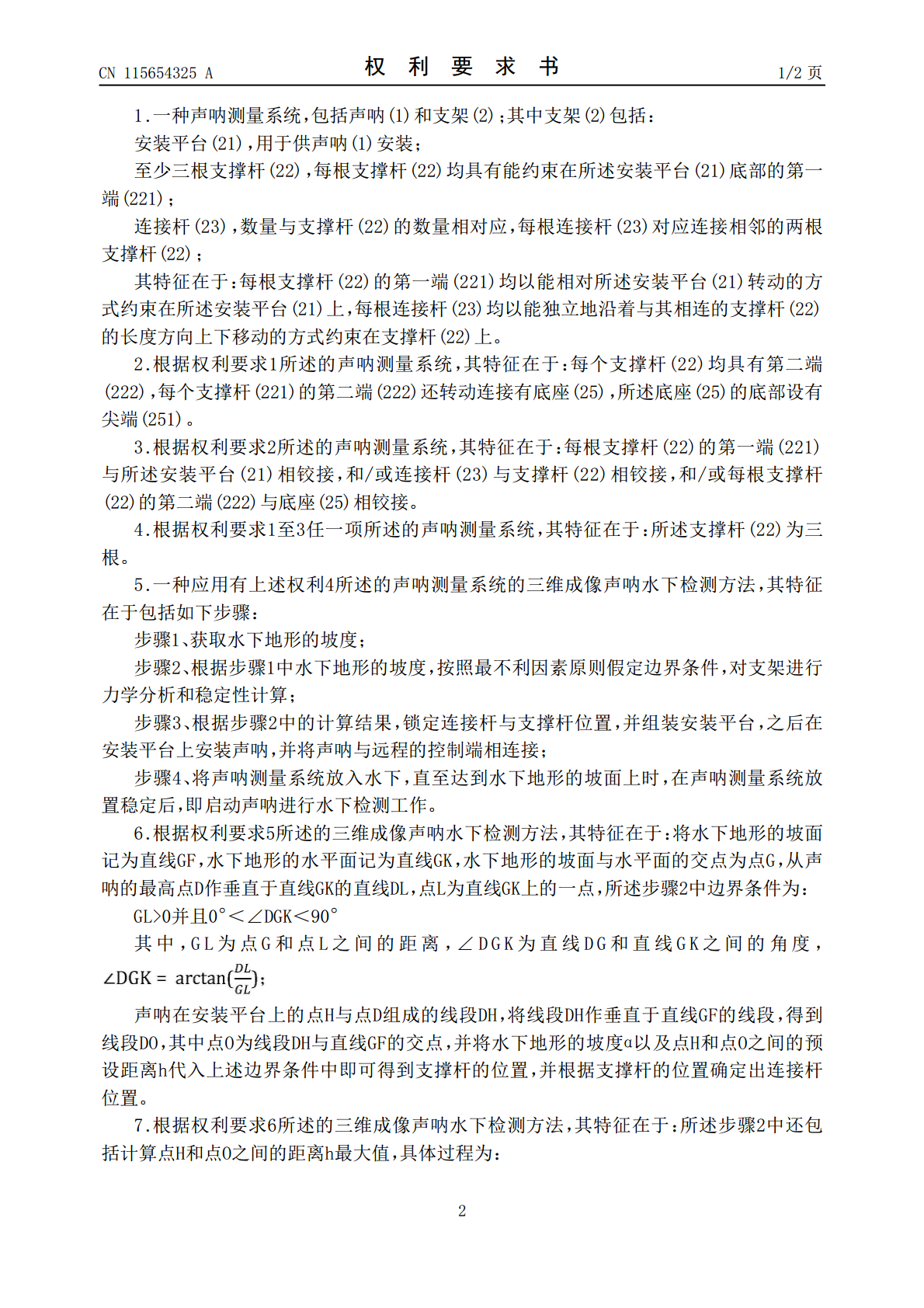
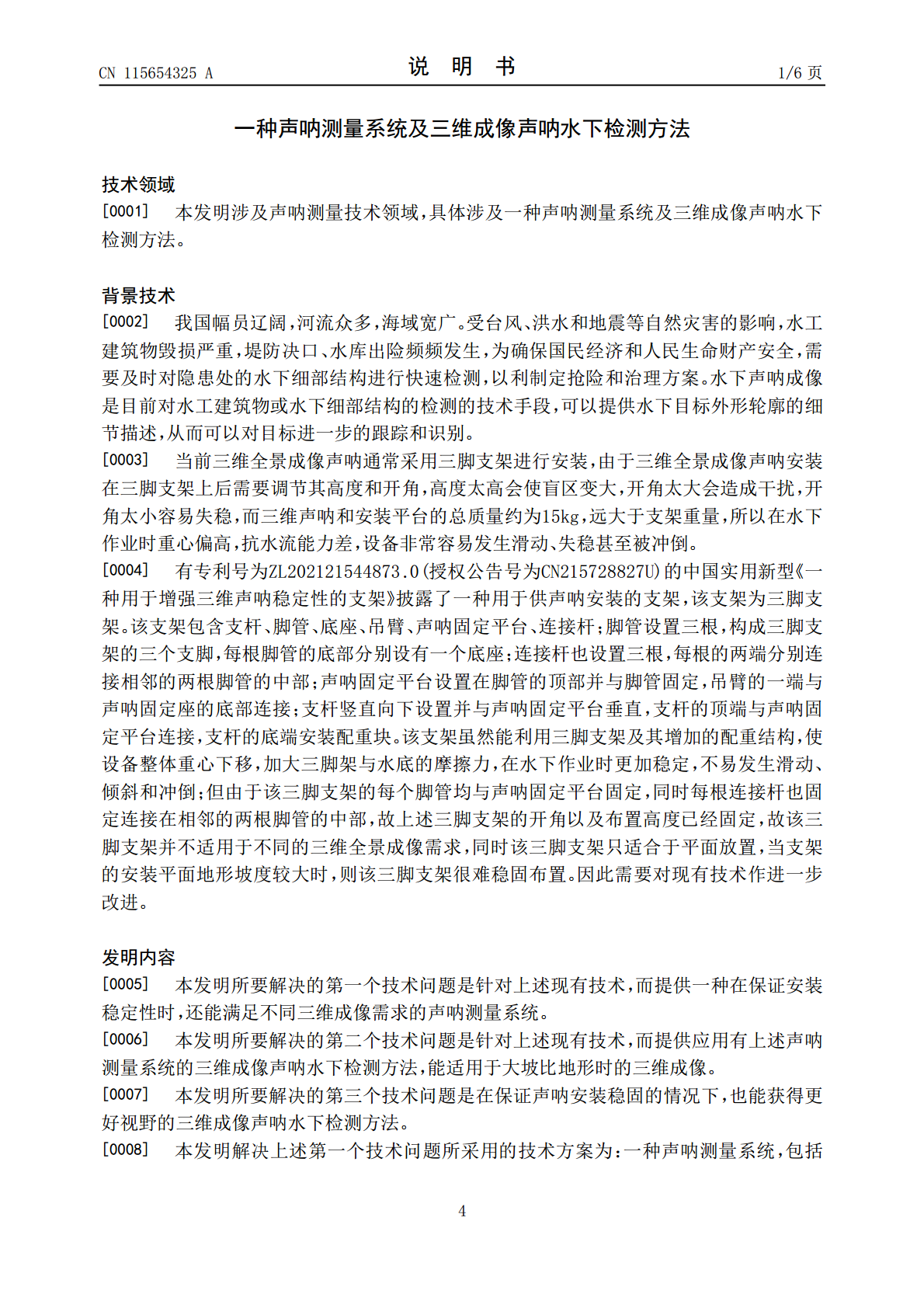
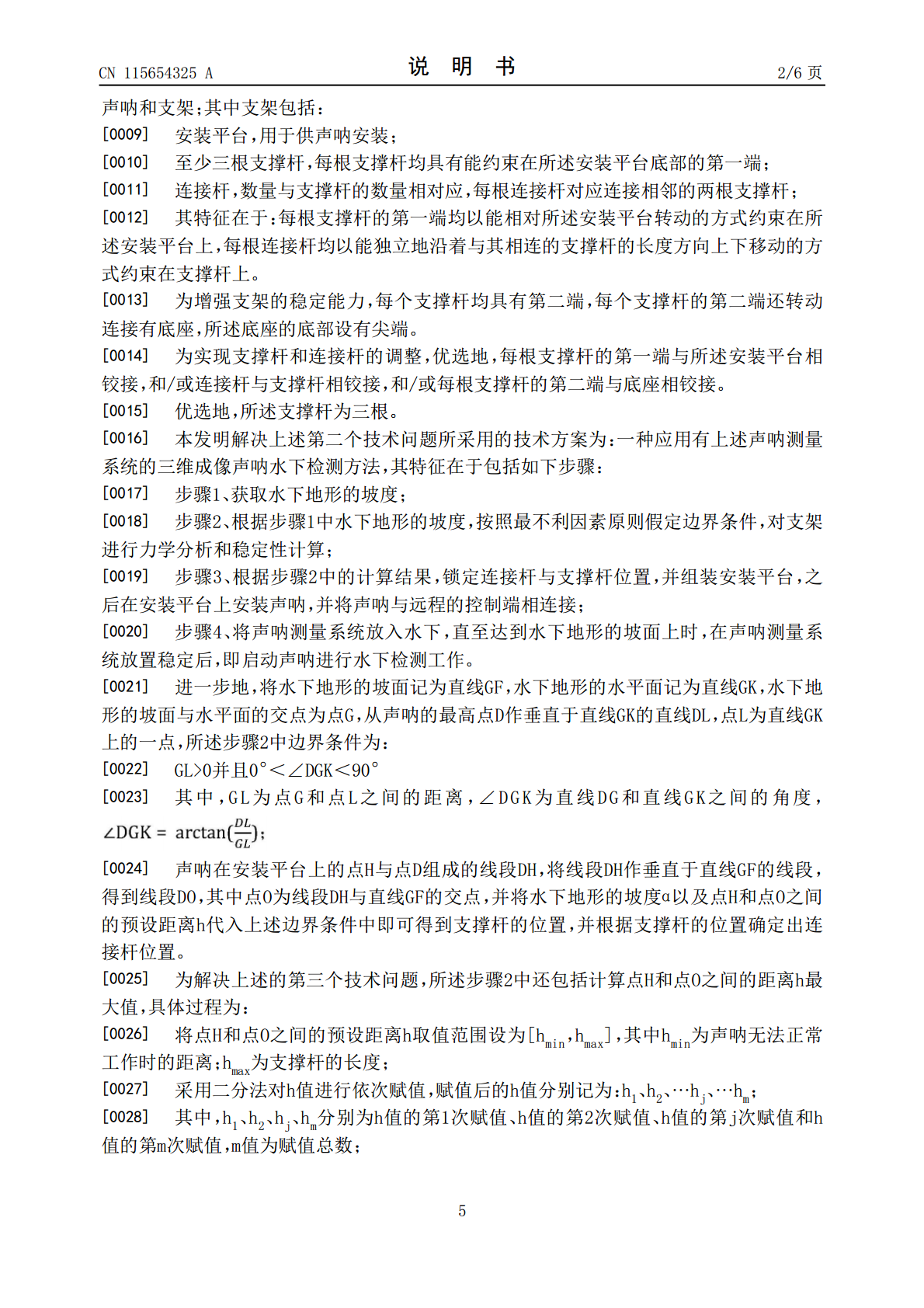
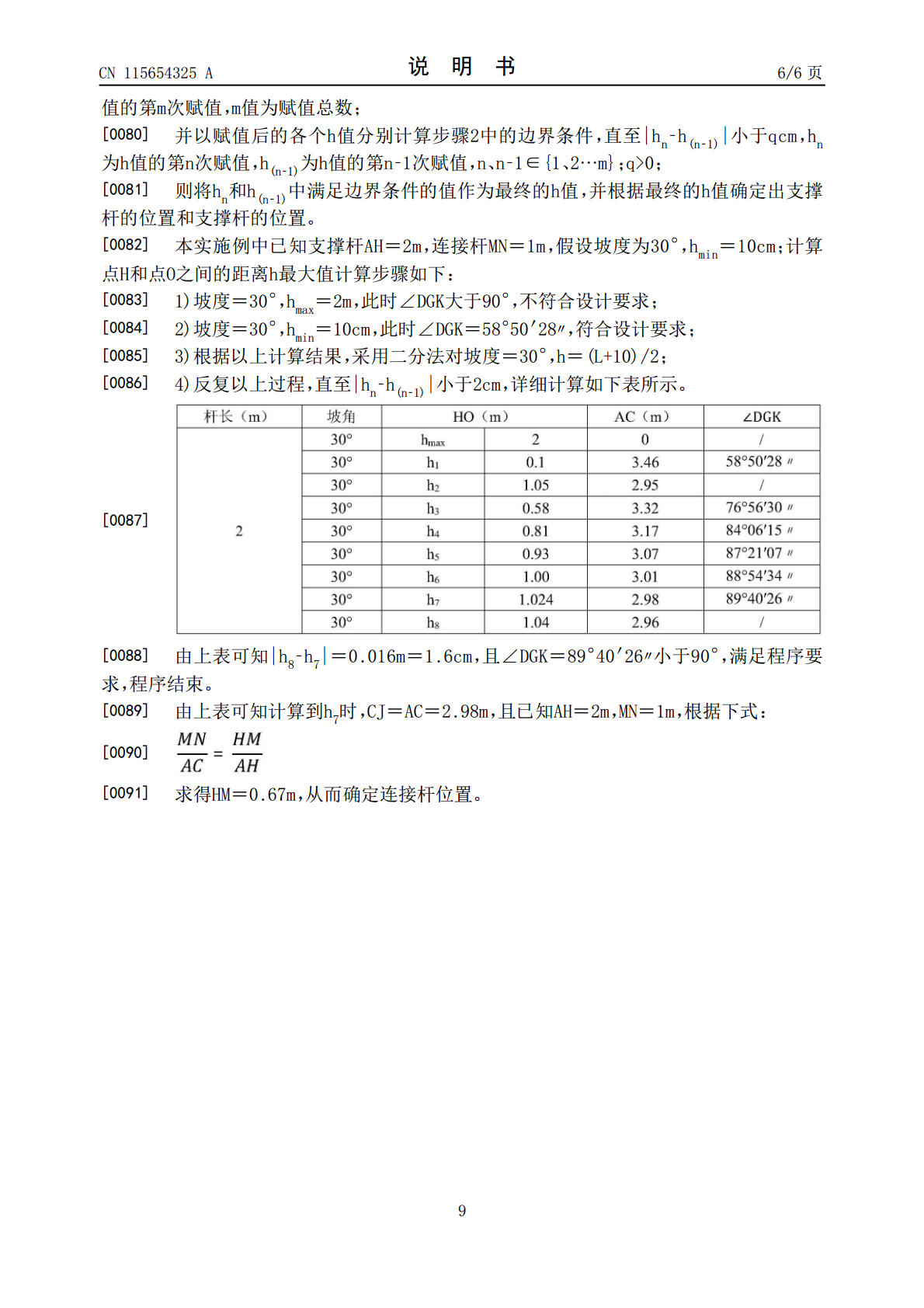
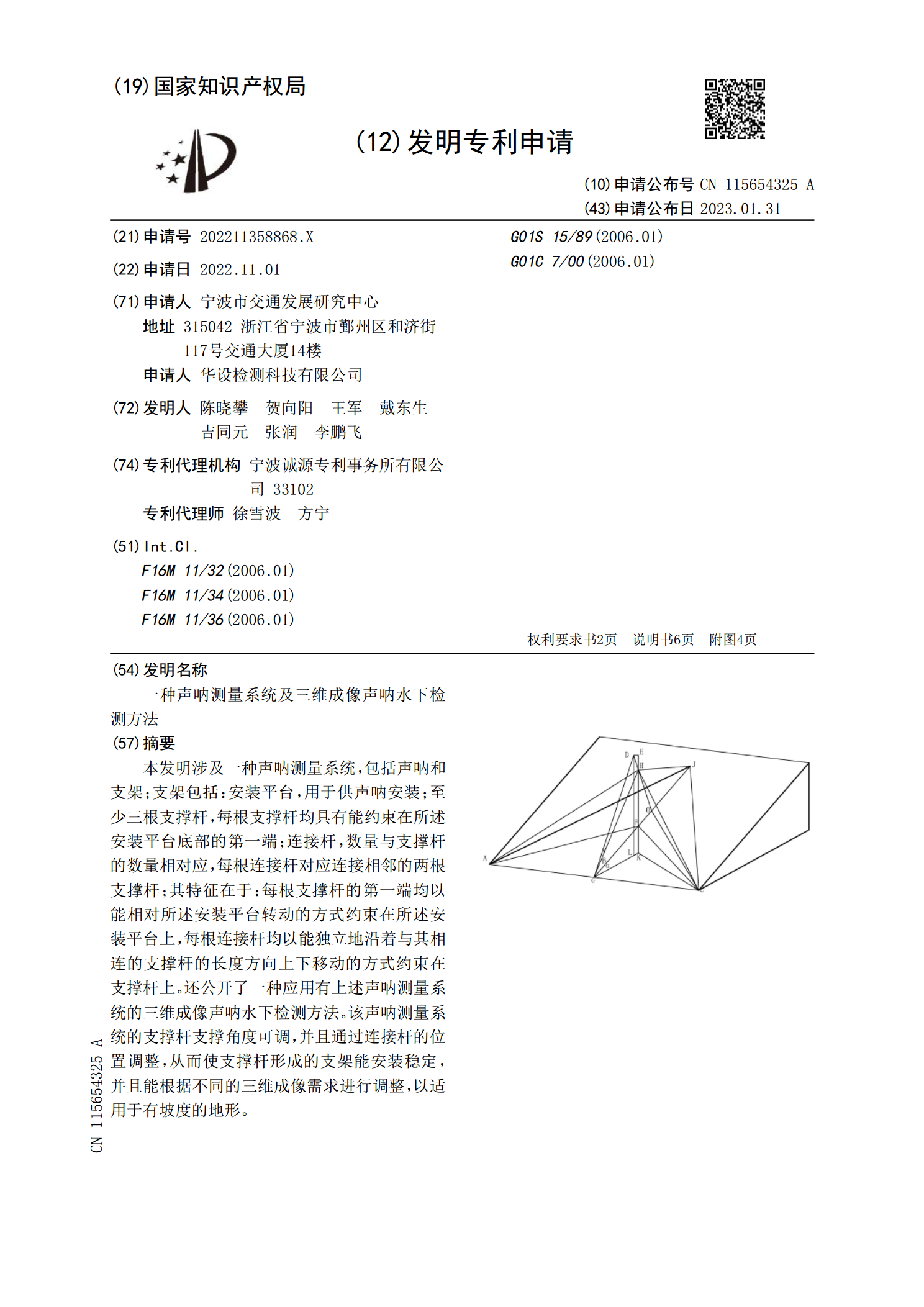
本发明涉及一种声呐测量系统,包括声呐和支架;支架包括:安装平台,用于供声呐安装;至少三根支撑杆,每根支撑杆均具有能约束在所述安装平台底部的第一端;连接杆,数量与支撑杆的数量相对应,每根连接杆对应连接相邻的两根支撑杆;其特征在于:每根支撑杆的第一端均以能相对所述安装平台转动的方式约束在所述安装平台上,每根连接杆均以能独立地沿着与其相连的支撑杆的长度方向上下移动的方式约束在支撑杆上。还公开了一种应用有上述声呐测量系统的三维成像声呐水下检测方法。该声呐测量系统的支撑杆支撑角度可调,并且通过连接杆的位置调整,从而
一种三维成像声呐点云的水下地形匹配定位方法及系统.pdf
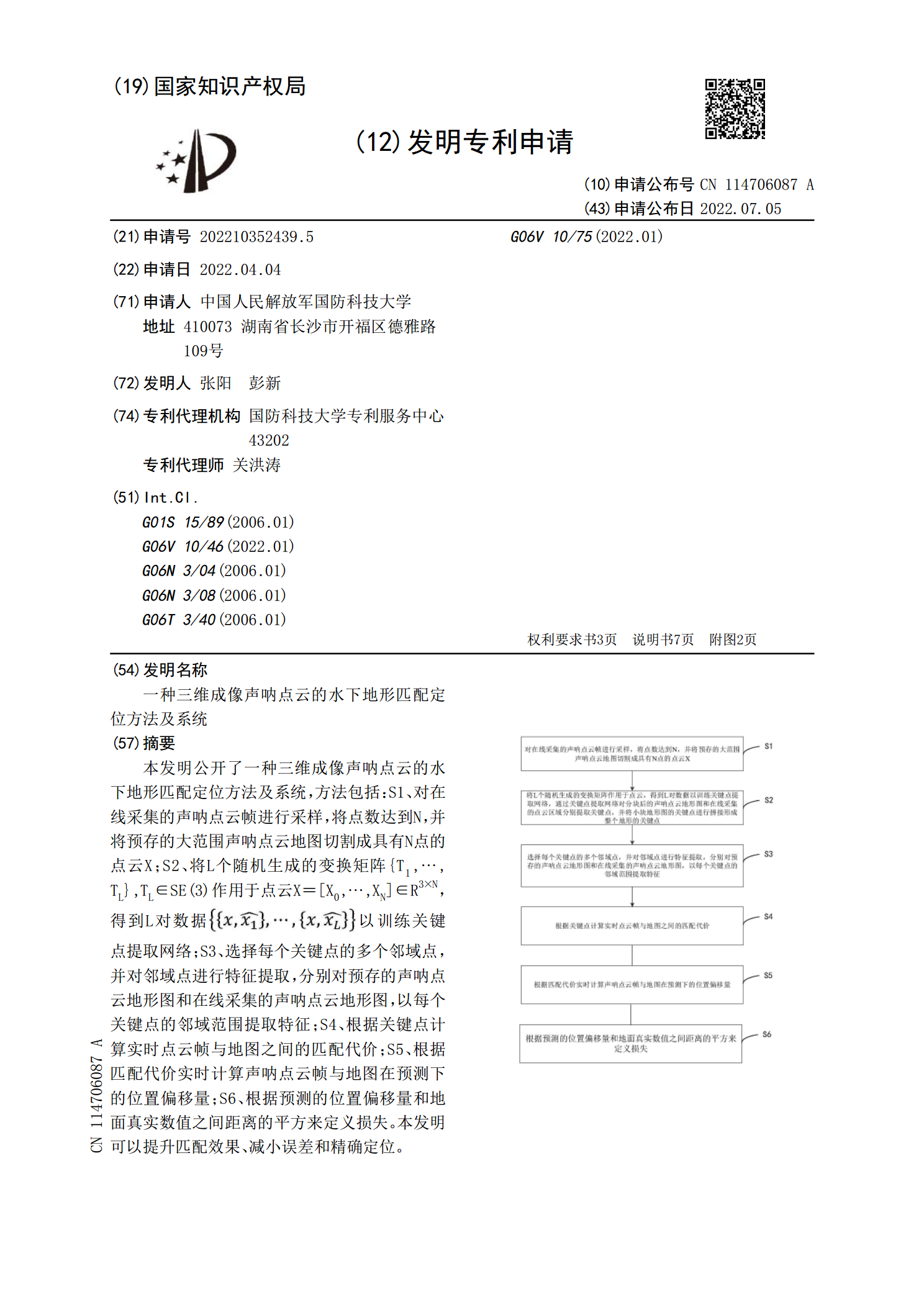
本发明公开了一种三维成像声呐点云的水下地形匹配定位方法及系统,方法包括:S1、对在线采集的声呐点云帧进行采样,将点数达到N,并将预存的大范围声呐点云地图切割成具有N点的点云X;S2、将L个随机生成的变换矩阵{T<base:Sub>1</base:Sub>,…,T<base:Sub>L</base:Sub>},T<base:Sub>L</base:Sub>∈SE(3)作用于点云X=[X<base:Sub>0</base:Sub>,…,X<base:Sub>N</base:Sub>]∈R<base:Sup>3
一种水下声呐检测设备.pdf
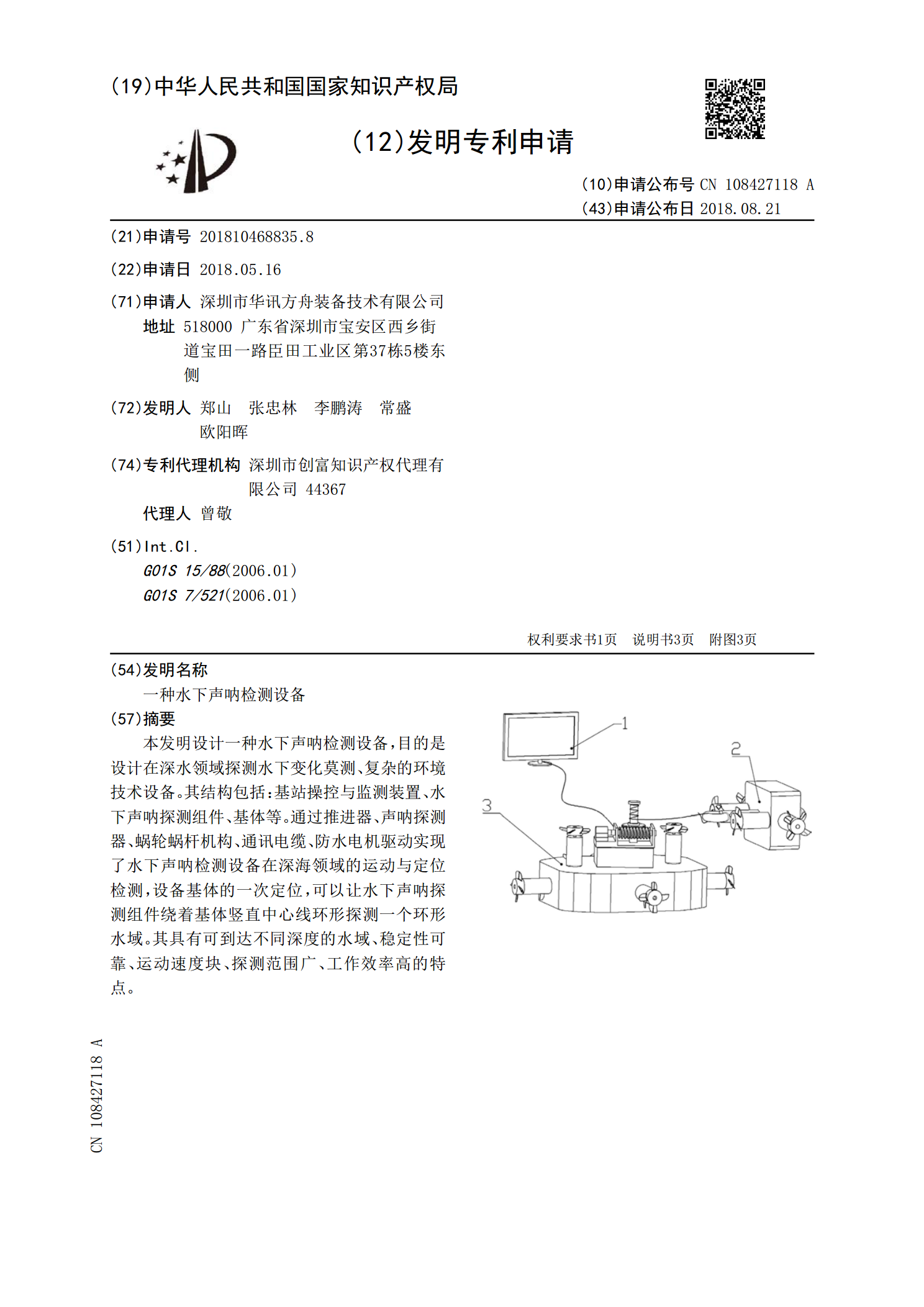
本发明设计一种水下声呐检测设备,目的是设计在深水领域探测水下变化莫测、复杂的环境技术设备。其结构包括:基站操控与监测装置、水下声呐探测组件、基体等。通过推进器、声呐探测器、蜗轮蜗杆机构、通讯电缆、防水电机驱动实现了水下声呐检测设备在深海领域的运动与定位检测,设备基体的一次定位,可以让水下声呐探测组件绕着基体竖直中心线环形探测一个环形水域。其具有可到达不同深度的水域、稳定性可靠、运动速度块、探测范围广、工作效率高的特点。

一种成像声呐检测水下平面形桥墩裂缝的测点布设方法.pdf
本发明涉及一种成像声呐检测水下平面形桥墩裂缝的测点布设方法。用于部署多个测点对桥墩平面裂缝进行完整检测。其中,检测桥墩对象为平面形桥墩;测点布设方法是基于声呐中心轴向正对桥墩平面的检测测位进行测点布设。所述测点布设方法中,当声呐和桥墩平面沿桥墩平面法向的距离保持不变时,能通过横向移动和竖向移动声呐布设多个测点,且保证相邻测点的波束范围相互覆盖以补偿各测点下无法检测到的盲区范围,从而实现对桥墩平面裂缝的完整检测。本发明能在完整检测平面桥墩裂缝的同时使得测点布设数量少,提高检测效率。

波束形成方法及三维成像声呐.pdf
本发明公开了一种波束形成方法,包括以下步骤:将均匀平面接收阵对应的成像区域进行划分以形成完整覆盖所述成像区域且彼此不重叠的M个矩形子区域;在每个区域内选择一个波束方向作为目标回波方向计算出均匀平面接收阵上每一个阵子的回波到达时间;根据每个阵子的回波到达时间获取均匀平面接收阵上所有阵子接收的回波采样数据;分别对每个子区域相应的回波信号进行快速傅里叶变换并将快速傅里叶变换的输出结果进行波束形成运算。本发明还公开了一种采用上述波束形成方法的三维成像声呐以及一种可用于非均匀平面接收阵的波束方法和三维成像声呐。本发