
一种水下三维地形匹配定位导航声呐及导航方法.pdf

努力****向丝


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种水下三维地形匹配定位导航声呐及导航方法.pdf
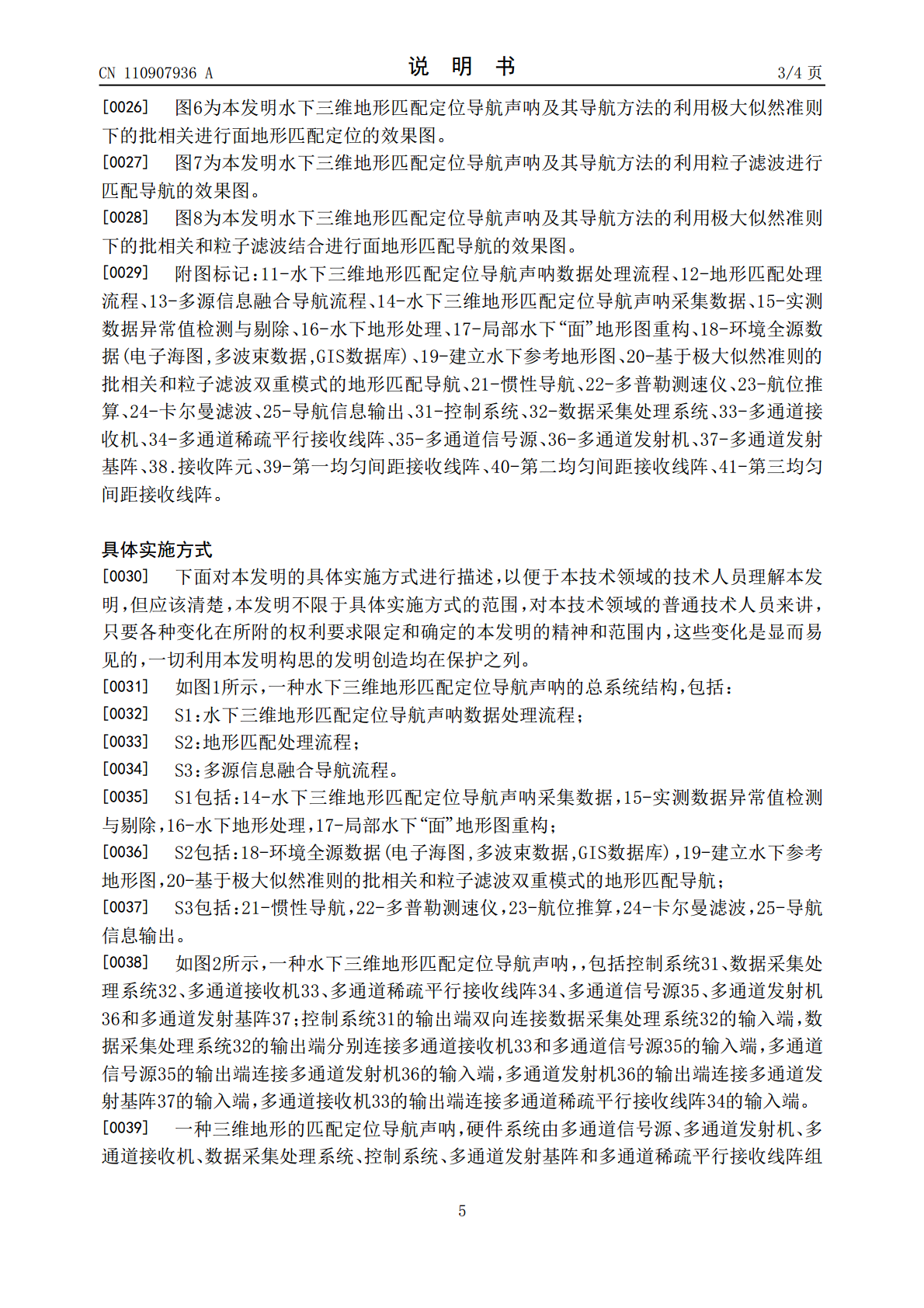
本发明公开了一种水下三维地形匹配定位导航声呐,包括控制系统、数据采集处理系统、多通道接收机、多通道稀疏平行接收线阵、多通道信号源、多通道发射机和多通道发射基阵;控制系统的输出端双向连接数据采集处理系统的输入端,数据采集处理系统的输出端分别连接多通道接收机和多通道信号源的输入端,解决了传统声呐地形探测效率低、信息量少、地形匹配的效率与准确率低、无法修正惯导和多普勒计程仪的累计误差,无法提高地形匹配定位导航算法的鲁棒性的问题。
一种基于惯性导航的水下声呐装置.pdf
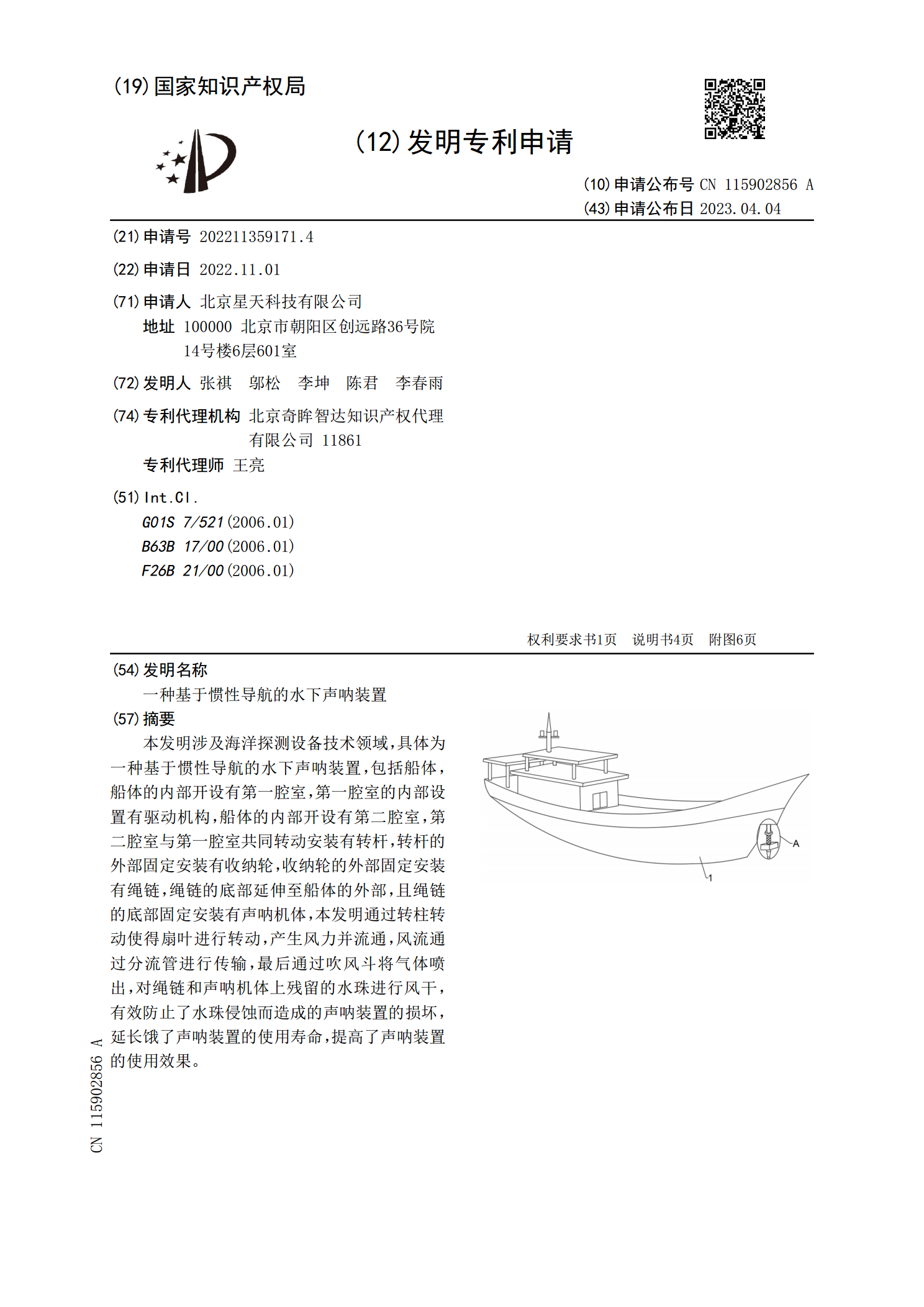
本发明涉及海洋探测设备技术领域,具体为一种基于惯性导航的水下声呐装置,包括船体,船体的内部开设有第一腔室,第一腔室的内部设置有驱动机构,船体的内部开设有第二腔室,第二腔室与第一腔室共同转动安装有转杆,转杆的外部固定安装有收纳轮,收纳轮的外部固定安装有绳链,绳链的底部延伸至船体的外部,且绳链的底部固定安装有声呐机体,本发明通过转柱转动使得扇叶进行转动,产生风力并流通,风流通过分流管进行传输,最后通过吹风斗将气体喷出,对绳链和声呐机体上残留的水珠进行风干,有效防止了水珠侵蚀而造成的声呐装置的损坏,延长饿了声呐
基于卫星导航系统的水下导航定位基准装置及方法.pdf
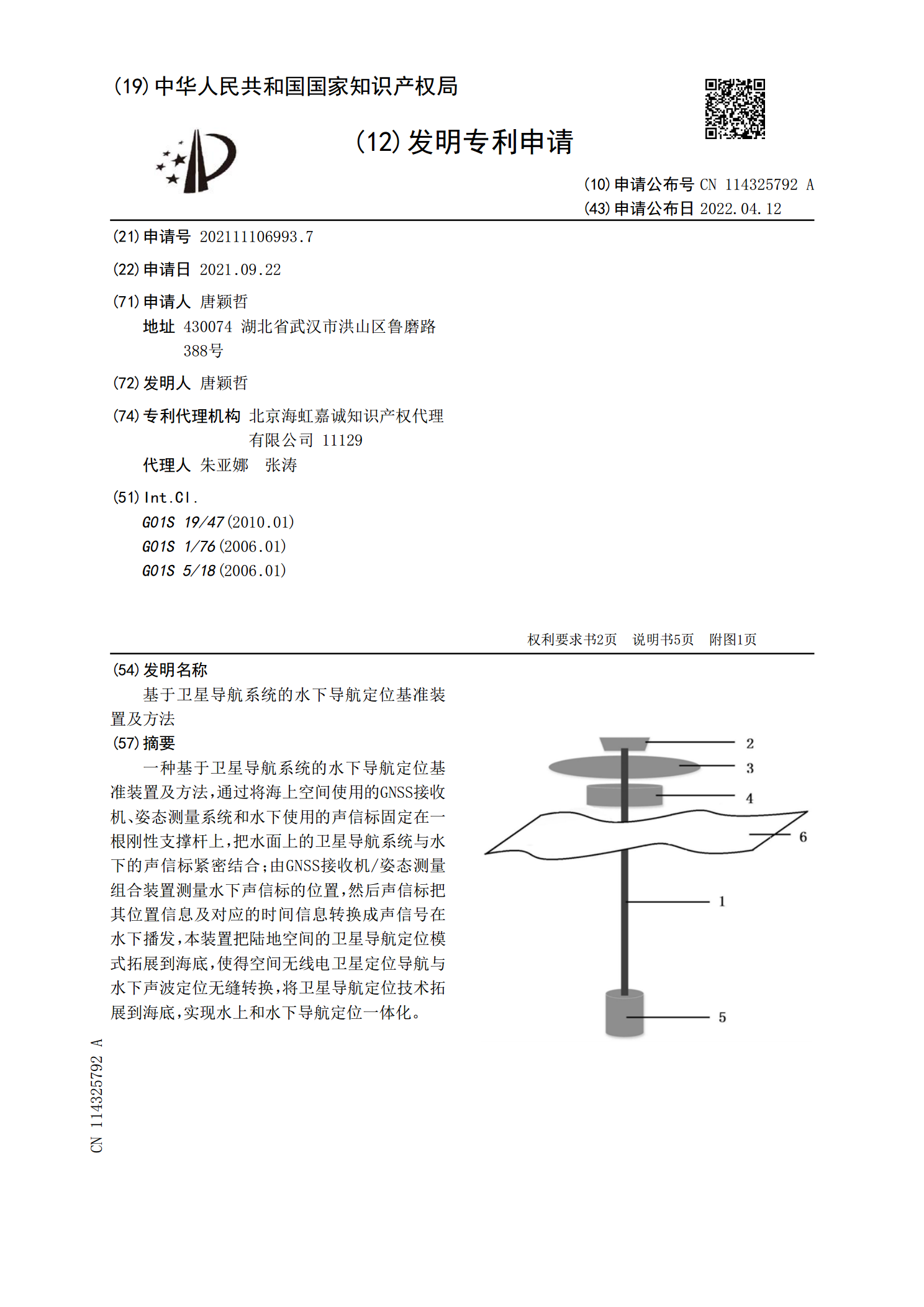
一种基于卫星导航系统的水下导航定位基准装置及方法,通过将海上空间使用的GNSS接收机、姿态测量系统和水下使用的声信标固定在一根刚性支撑杆上,把水面上的卫星导航系统与水下的声信标紧密结合;由GNSS接收机/姿态测量组合装置测量水下声信标的位置,然后声信标把其位置信息及对应的时间信息转换成声信号在水下播发,本装置把陆地空间的卫星导航定位模式拓展到海底,使得空间无线电卫星定位导航与水下声波定位无缝转换,将卫星导航定位技术拓展到海底,实现水上和水下导航定位一体化。

一种水下移动平台导航方法以及水下移动平台导航装置.pdf
本申请提供了一种水下移动平台导航方法。所述水下移动平台导航方法包括:获取捷联式惯性导航系统生成的第一导航信息;获取多普勒速度声呐系统生成的第二导航信息;获取北斗卫星导航系统或者磁罗盘系统生成的修正导航信息;根据第一导航信息以及第二导航信息生成第一融合导航信息;根据第一融合导航信息以及修正导航信息生成第二融合导航信息;根据第二融合导航信息生成导航控制信息;根据导航控制信息控制水下移动平台运动。本申请的水下移动平台导航方法通过组合导航技术进行修正误差的辅助导航技术,旨在采用高精度的导航技术对SINS随时间累积
一种声呐测量系统及三维成像声呐水下检测方法.pdf
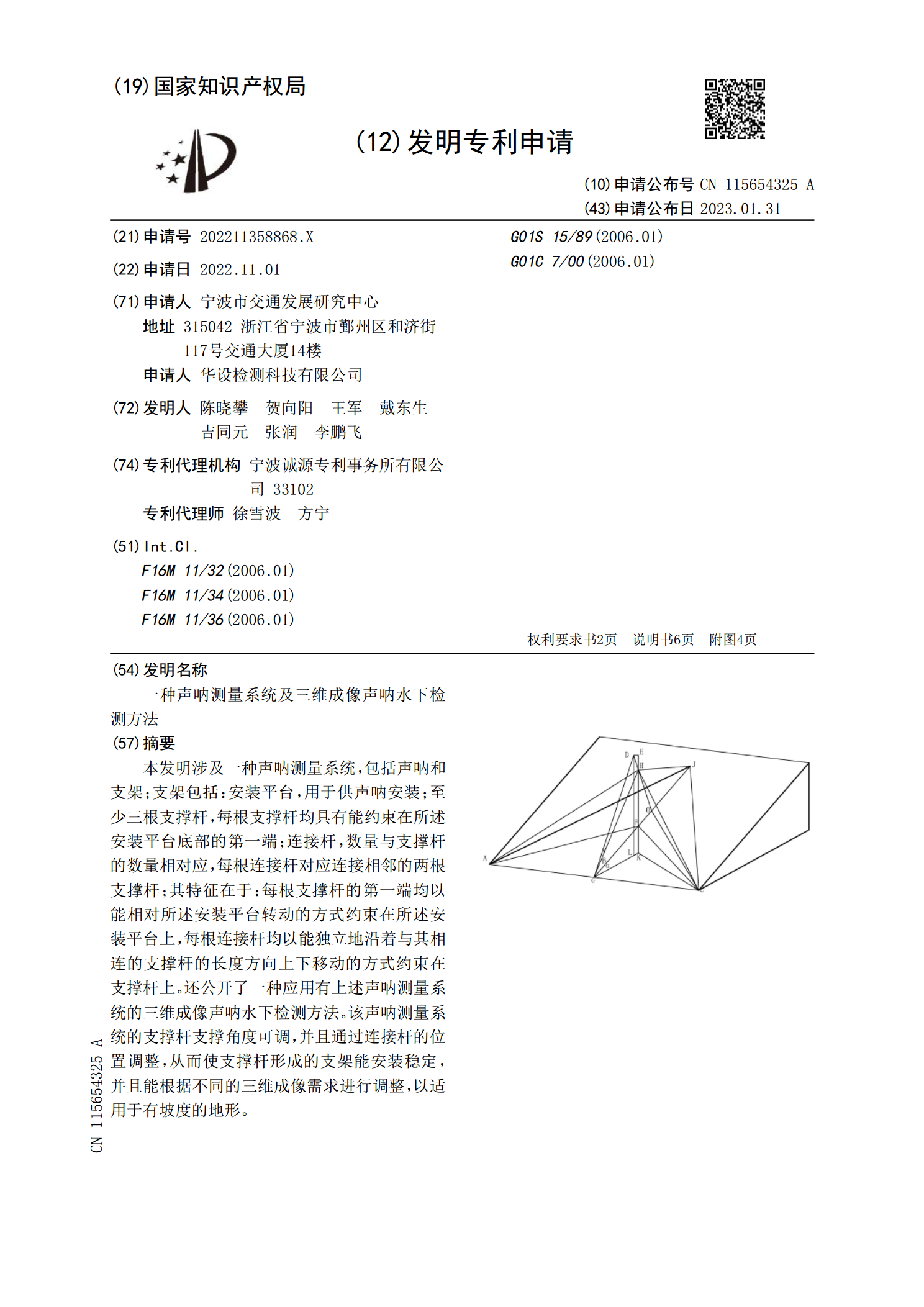
本发明涉及一种声呐测量系统,包括声呐和支架;支架包括:安装平台,用于供声呐安装;至少三根支撑杆,每根支撑杆均具有能约束在所述安装平台底部的第一端;连接杆,数量与支撑杆的数量相对应,每根连接杆对应连接相邻的两根支撑杆;其特征在于:每根支撑杆的第一端均以能相对所述安装平台转动的方式约束在所述安装平台上,每根连接杆均以能独立地沿着与其相连的支撑杆的长度方向上下移动的方式约束在支撑杆上。还公开了一种应用有上述声呐测量系统的三维成像声呐水下检测方法。该声呐测量系统的支撑杆支撑角度可调,并且通过连接杆的位置调整,从而