
一种新型管外行走机器人.pdf

萌运****魔王

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种新型管外行走机器人.pdf
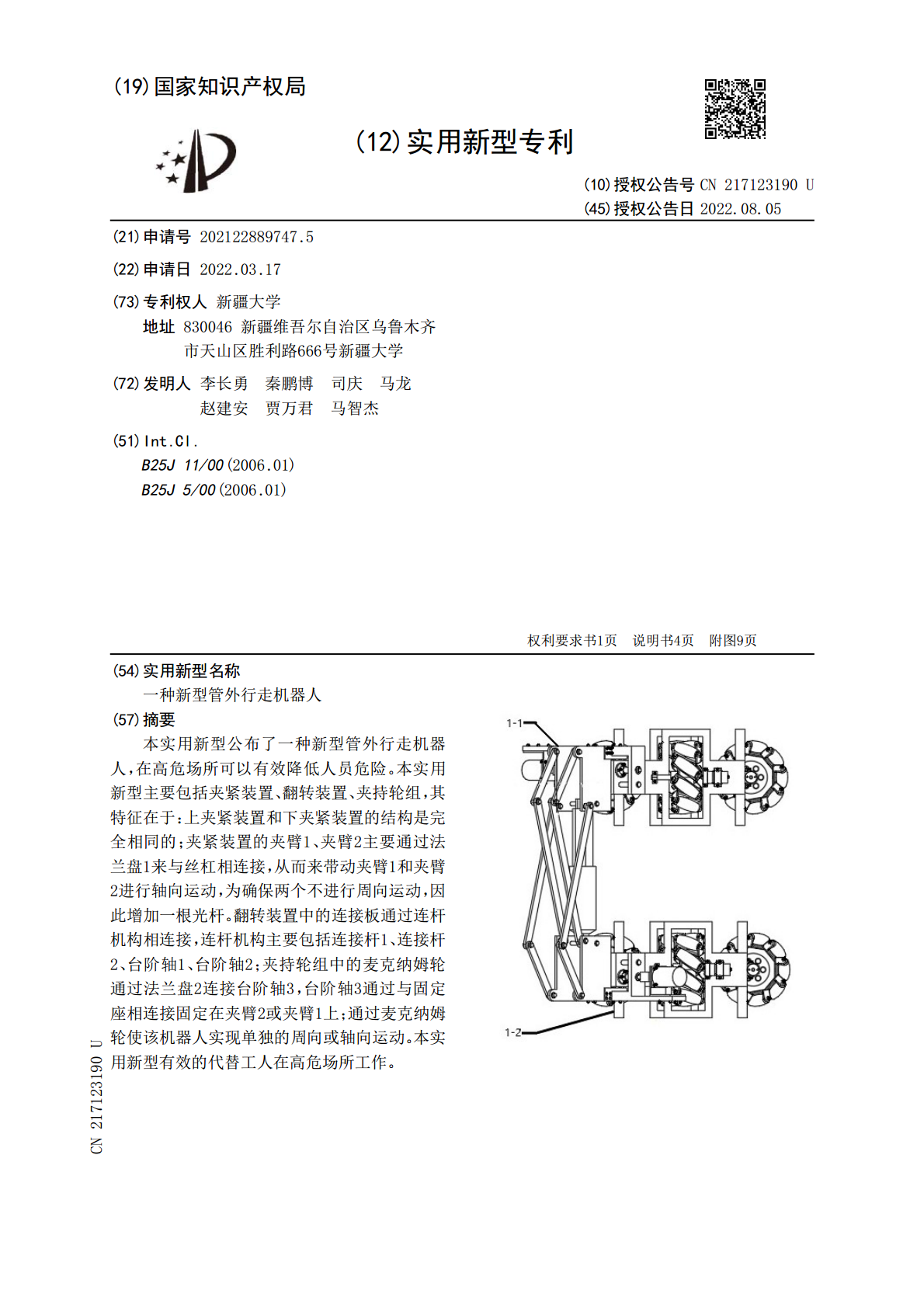
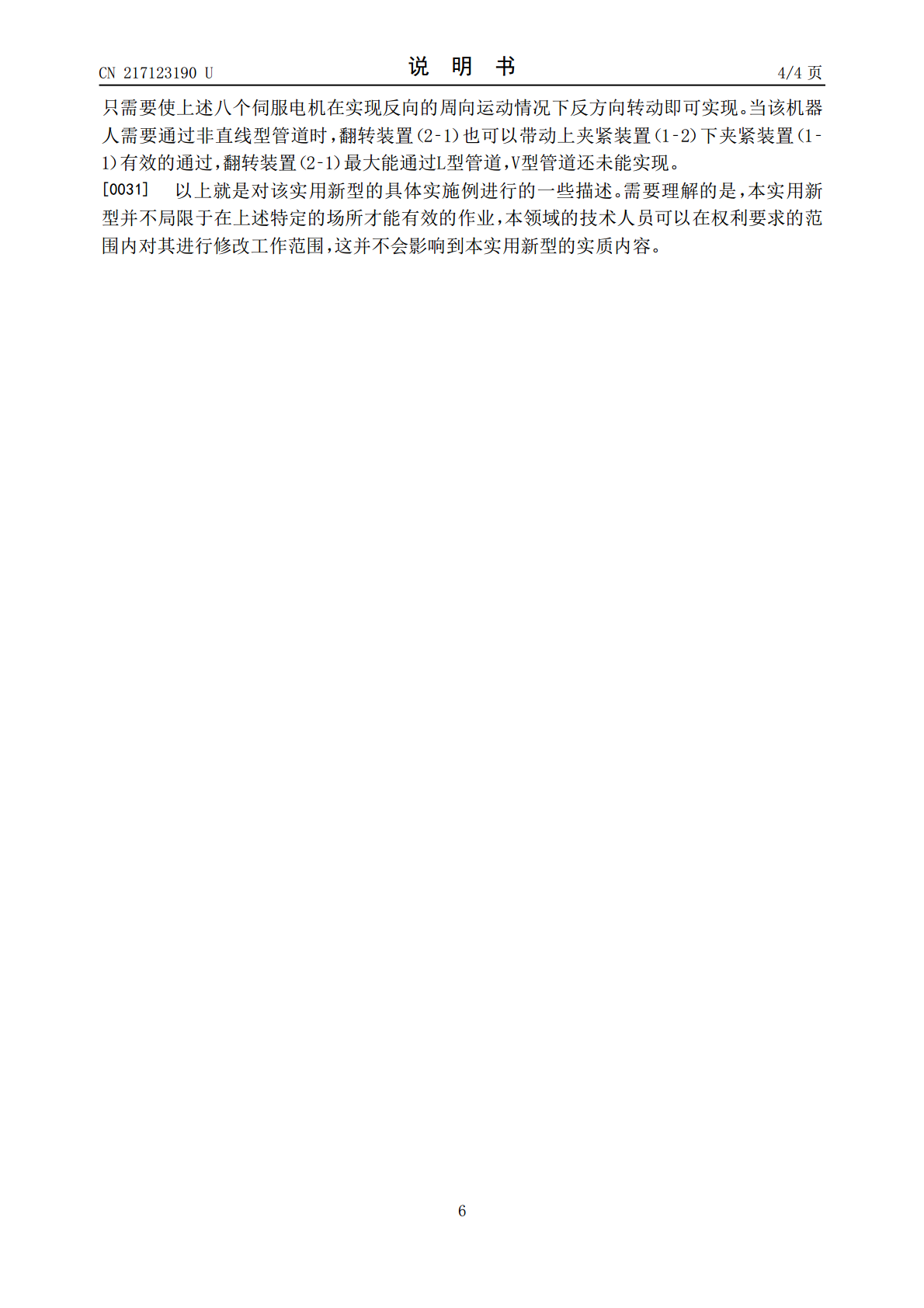
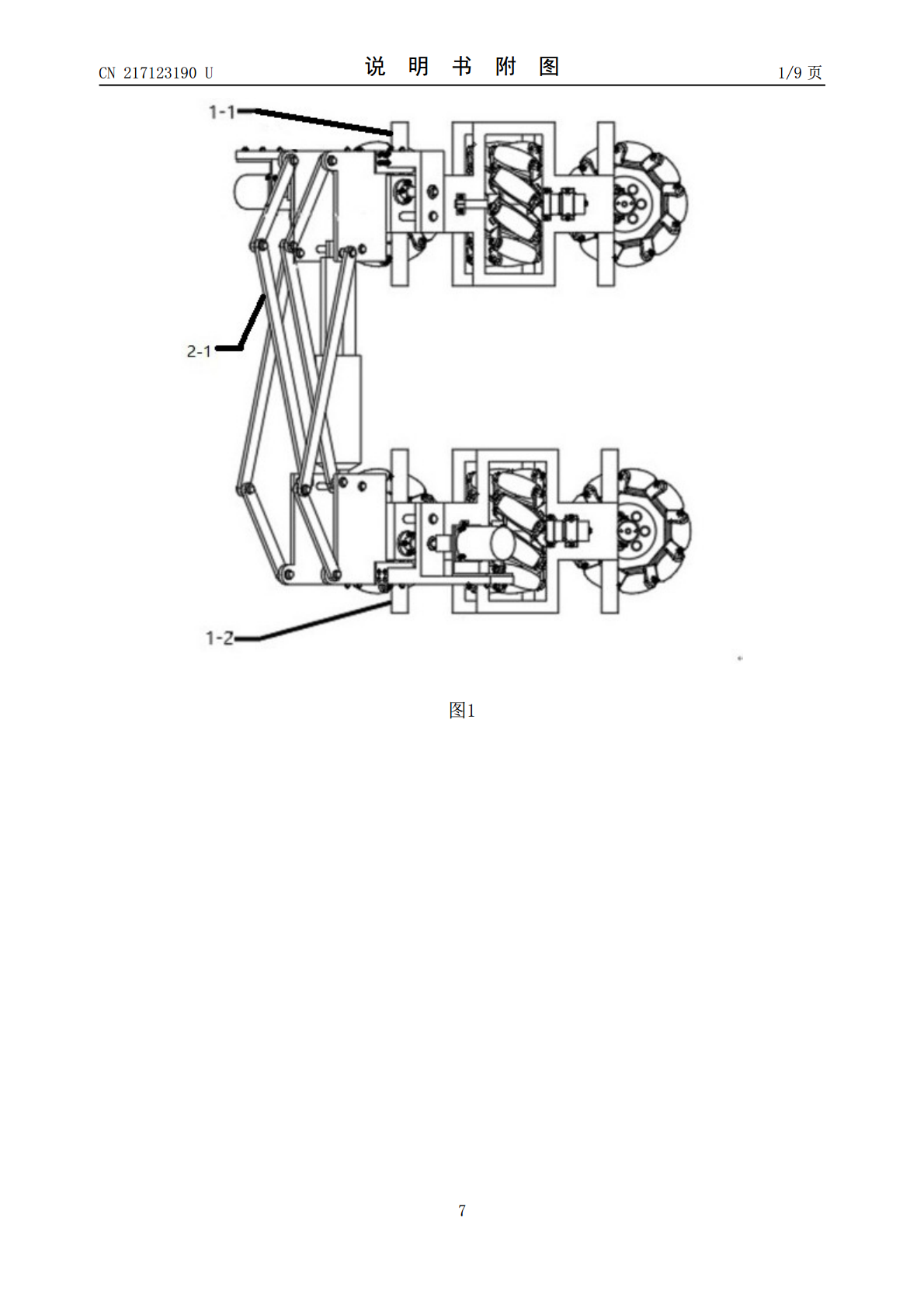
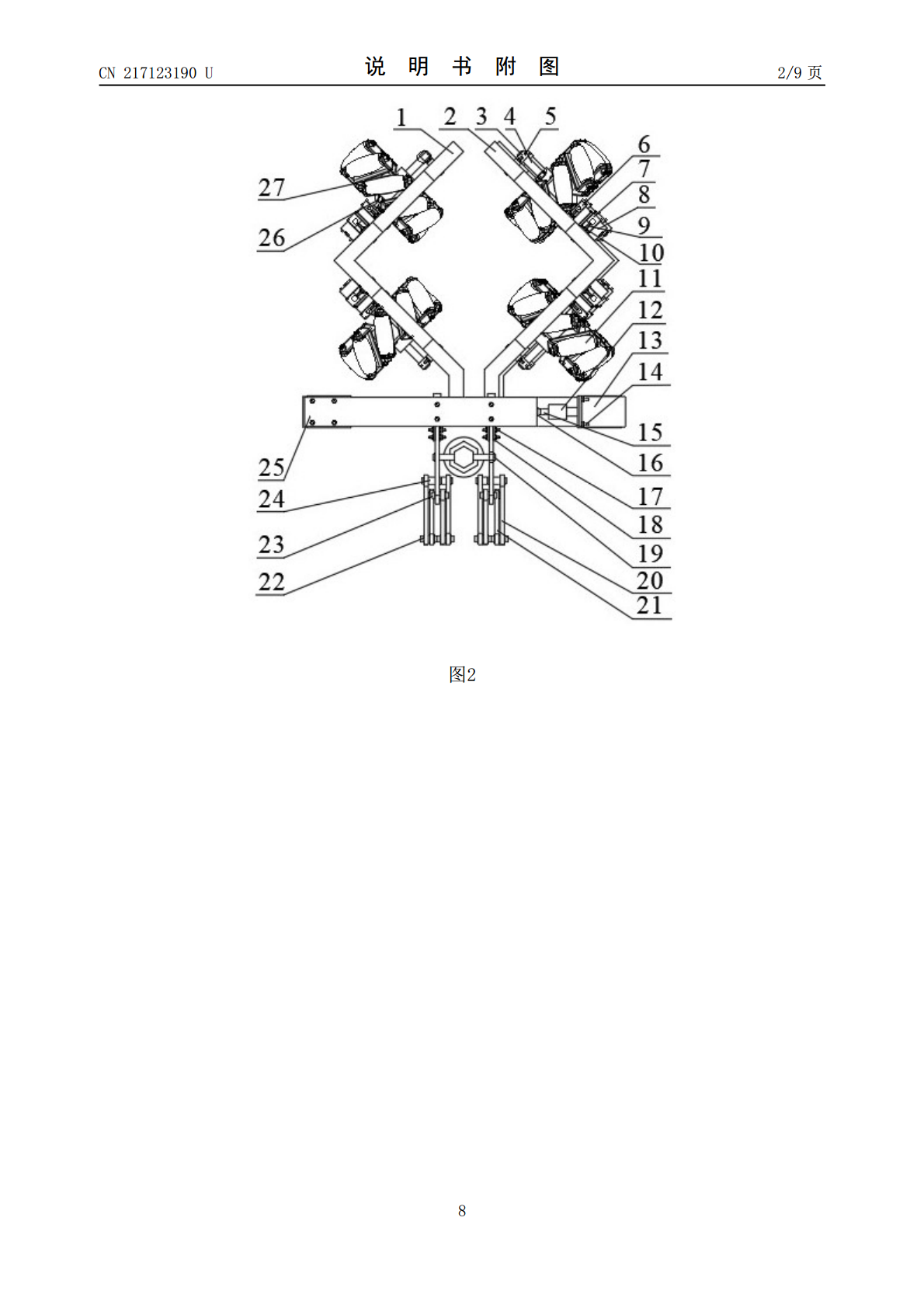
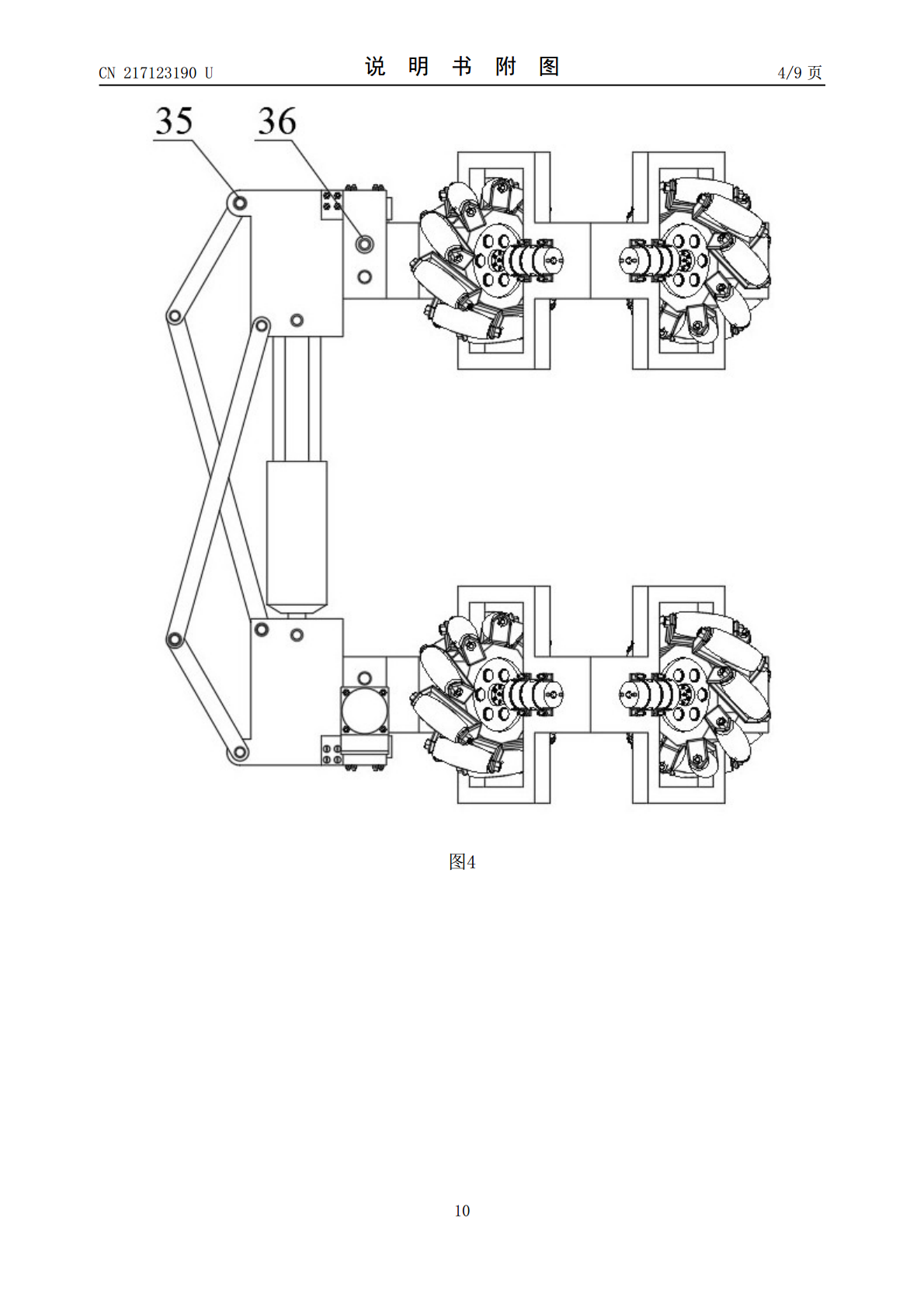
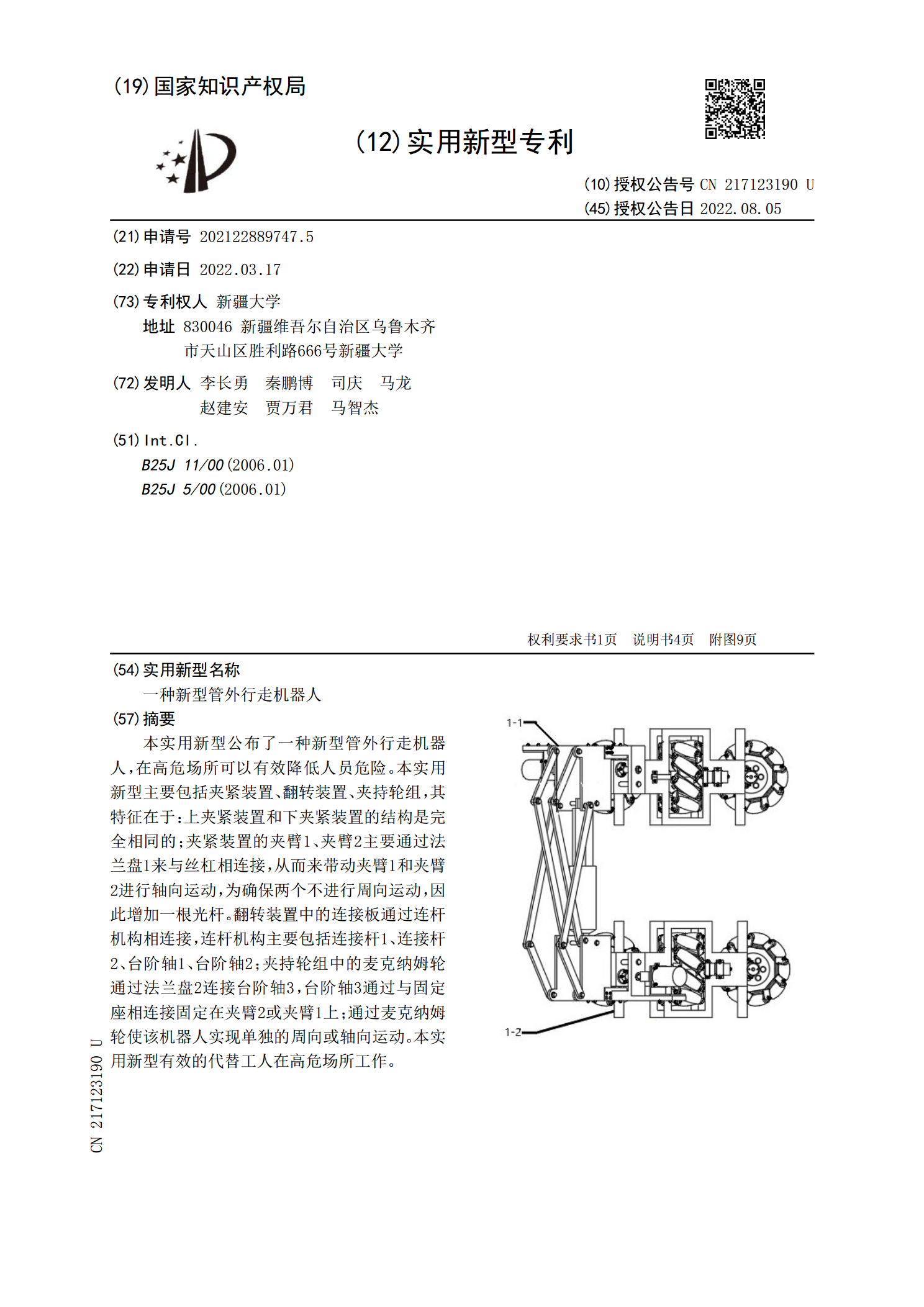
本实用新型公布了一种新型管外行走机器人,在高危场所可以有效降低人员危险。本实用新型主要包括夹紧装置、翻转装置、夹持轮组,其特征在于:上夹紧装置和下夹紧装置的结构是完全相同的;夹紧装置的夹臂1、夹臂2主要通过法兰盘1来与丝杠相连接,从而来带动夹臂1和夹臂2进行轴向运动,为确保两个不进行周向运动,因此增加一根光杆。翻转装置中的连接板通过连杆机构相连接,连杆机构主要包括连接杆1、连接杆2、台阶轴1、台阶轴2;夹持轮组中的麦克纳姆轮通过法兰盘2连接台阶轴3,台阶轴3通过与固定座相连接固定在夹臂2或夹臂1上;通过麦
一种新型行走机构及特种机器人.pdf
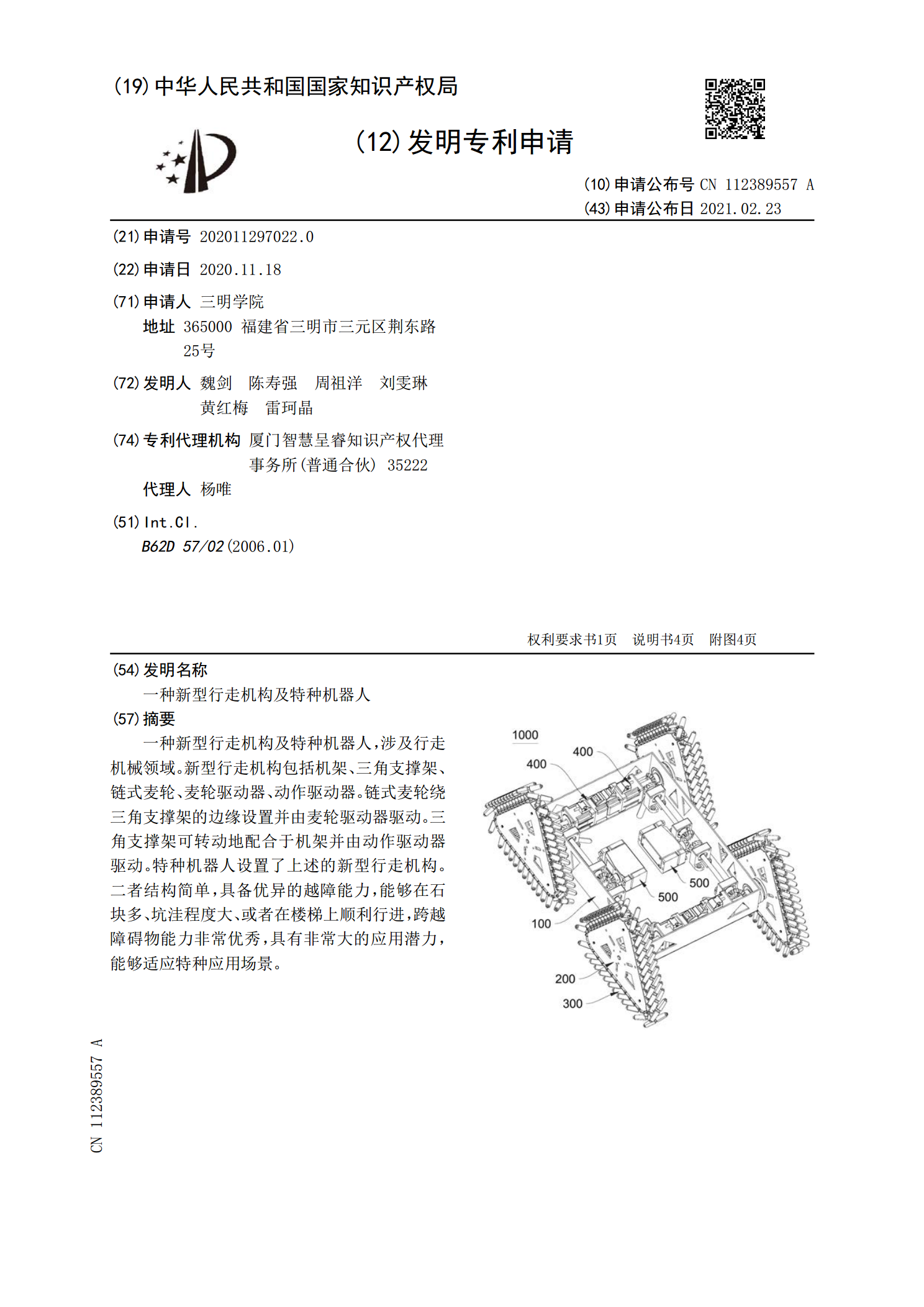
一种新型行走机构及特种机器人,涉及行走机械领域。新型行走机构包括机架、三角支撑架、链式麦轮、麦轮驱动器、动作驱动器。链式麦轮绕三角支撑架的边缘设置并由麦轮驱动器驱动。三角支撑架可转动地配合于机架并由动作驱动器驱动。特种机器人设置了上述的新型行走机构。二者结构简单,具备优异的越障能力,能够在石块多、坑洼程度大、或者在楼梯上顺利行进,跨越障碍物能力非常优秀,具有非常大的应用潜力,能够适应特种应用场景。

一种管外行走机器人的控制系统及工作方法.pdf
本发明公开了一种管外行走机器人的控制系统及其工作方法,它是由安装在管外行走机器人机身上的前端摄像头、后端摄像头、无线收发器、嵌入式主控机和由工作人员遥控操作的手持式无线监控终端组成;本发明通过上述各部件控制管外行走机器人在错综复杂的管道环境中攀爬直管、弯管、T形管或十字形管等多种管型并且可以围绕管道左右旋转,满足了对管道及各种圆柱形体工件的外部连续检测、维护、修复或清洁等的应用需要。

管外行走机器人机械结构及其工作方法.pdf
本发明公开了一种管外行走机器人机械结构及其工作方法,它由前后两节车体组成,两节车体通过一个平面铰链机构铰连接在一起,在在车体架的底面两侧安装有抱管行走机构。通过前后两节车体和抱管行走机构实现管外行走机器人可在各种姿态的管道或圆柱体外表面上行走,来满足对管道及各种圆柱型体工件的外部连续检测、维护或修复等需要。通过更换不同的支撑滚轮与行走滚轮的直径,一套机器人机构可以满足不同管径管道场合的应用。

一种新型智能擦玻璃机器人及其行走方法.pdf
本发明公开了一种新型智能擦玻璃机器人及其行走方法,属于擦玻璃机器人技术领域。擦玻璃机器人包括面壳、底壳、离心抽气装置,离心抽气装置设置于面壳与底壳之间,还包括两套清洁头装置,每套清洁头装置都包括驱动电机、蜗轮蜗杆驱动装置、斜齿轮、清洁头,蜗轮蜗杆驱动装置两端分别连接驱动电机输出端及斜齿轮,斜齿轮连接清洁头,两套清洁头装置的两个斜齿轮一个为左旋,另一个为右旋。通过这样的改进,以最少的重复路径及最小的死角高效直接地让清洁头遍擦整个玻璃面,而实现高效实用的清洁功能。行走方法包括直线行走方式和转弯方式,通过上述擦