
协同自适应巡航控制系统的输入饱和无源化控制方法.pdf

努力****星驰


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

协同自适应巡航控制系统的输入饱和无源化控制方法.pdf
本发明公开了一种协同自适应巡航控制系统的输入饱和无源化控制方法,用来解决CACC系统中的队列稳定控制问题。具体包括:1、建立车辆间的运动学方程;2、将队列稳定条件转化为输入饱和约束,以此得到带饱和输入的状态空间表达式;3、根据黎卡提方程,李雅普诺夫稳定理论和矩阵理论,设计系统的一种无源控制器;4、验证所设计的控制器在有扰动的情况下,是否仍能保持队列的稳定性。结果验证基于无源化的控制的器,既可以对扰动具有强鲁棒性,又具有输入限幅的功能,保证了队列的稳定性,且易于计算。
自适应巡航控制系统、方法及车辆.pdf
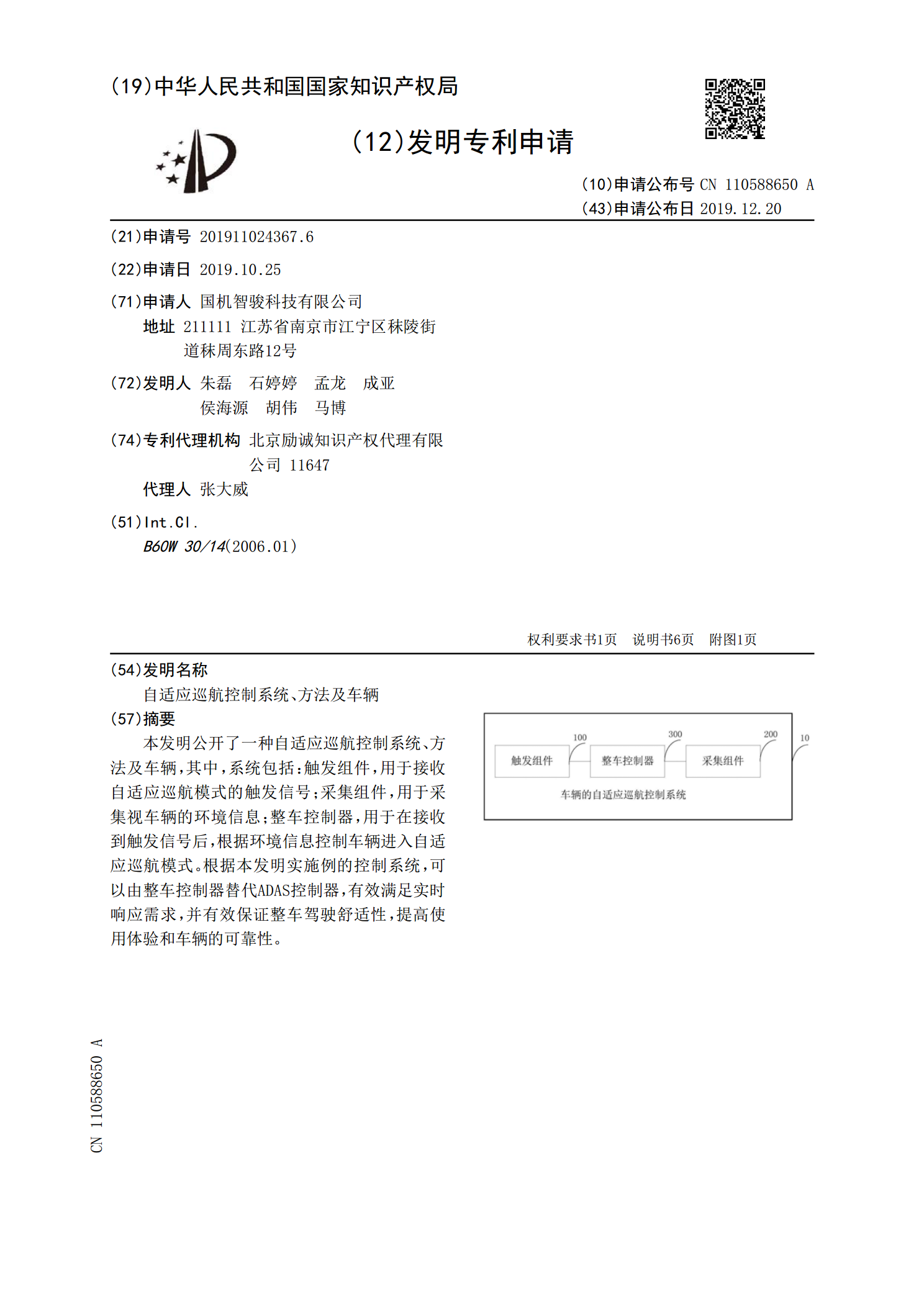
本发明公开了一种自适应巡航控制系统、方法及车辆,其中,系统包括:触发组件,用于接收自适应巡航模式的触发信号;采集组件,用于采集视车辆的环境信息;整车控制器,用于在接收到触发信号后,根据环境信息控制车辆进入自适应巡航模式。根据本发明实施例的控制系统,可以由整车控制器替代ADAS控制器,有效满足实时响应需求,并有效保证整车驾驶舒适性,提高使用体验和车辆的可靠性。

自适应巡航控制系统.pptx
会计学二、系统的局限性①是一个司机辅助系统,绝不可以将其看成安全系统,它也不是全自动驾驶系统;②系统在车速为30-200km/h时才工作;③系统对固定不动的目标无法作出反应;④雨水、浮沫以及雪泥水会影响雷达的工作效果;⑤在转弯半径很小时,由于雷达视野受到限制,所以会影响系统的功能。三、自适应巡航控制系统工作的前提条件(1)与前车的车距(2)前车的车速(3)前车的位置(4)如果雷达同时侦测到多辆车,那么上述信息就被用来选择车辆,以便针对选择的车辆来进行相应的调节。四、雷达技术的基本原理雷达是Radiodet
协同式自适应巡航控制车辆的微观模拟方法.pdf
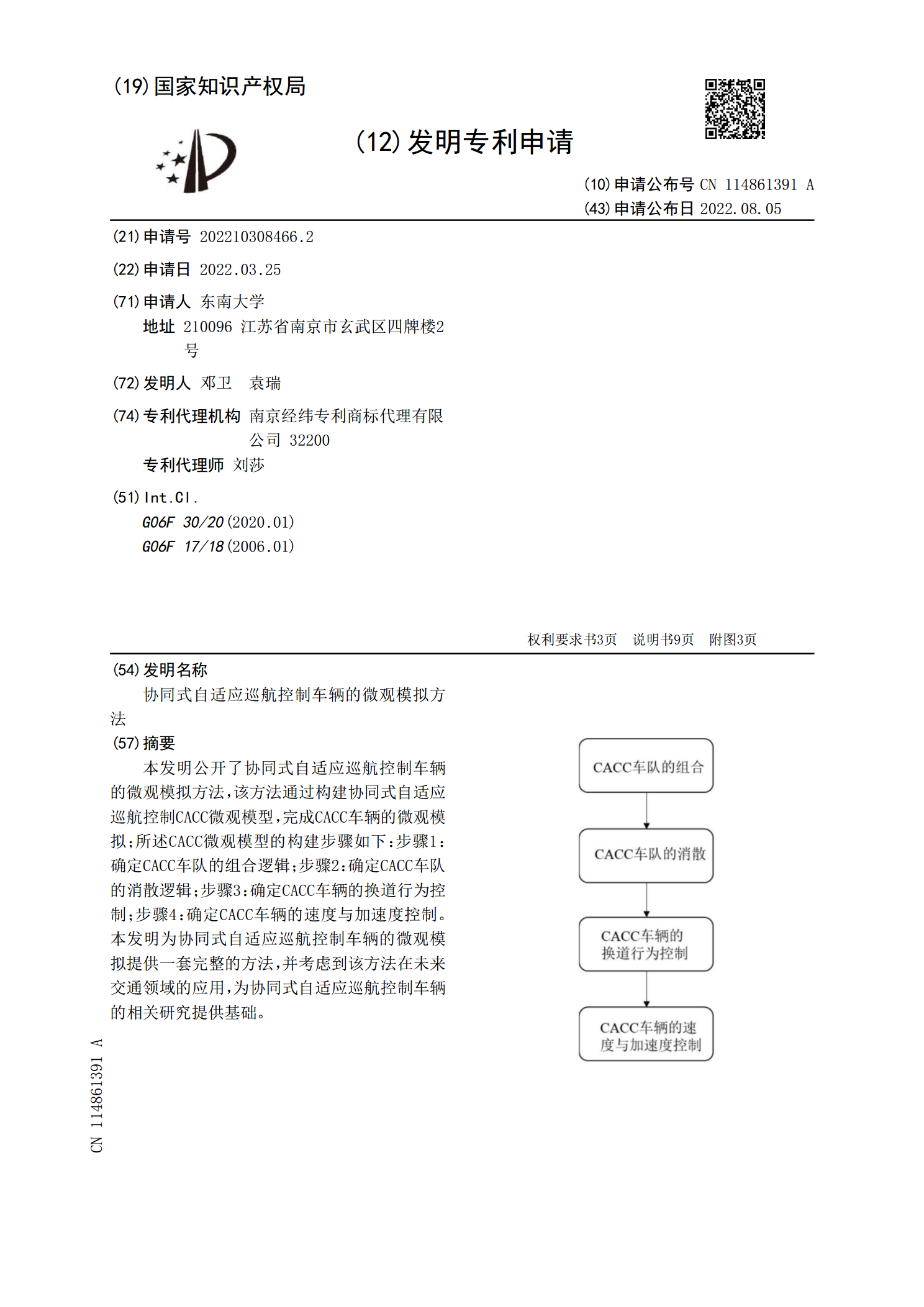
本发明公开了协同式自适应巡航控制车辆的微观模拟方法,该方法通过构建协同式自适应巡航控制CACC微观模型,完成CACC车辆的微观模拟;所述CACC微观模型的构建步骤如下:步骤1:确定CACC车队的组合逻辑;步骤2:确定CACC车队的消散逻辑;步骤3:确定CACC车辆的换道行为控制;步骤4:确定CACC车辆的速度与加速度控制。本发明为协同式自适应巡航控制车辆的微观模拟提供一套完整的方法,并考虑到该方法在未来交通领域的应用,为协同式自适应巡航控制车辆的相关研究提供基础。

自适应巡航控制系统ACC.ppt
一、系统的基本功能保持司机所选定的与前车的距离。二、系统的局限性①是一个司机辅助系统,绝不可以将其看成安全系统,它也不是全自动驾驶系统;②系统在车速为30-200km/h时才工作;③系统对固定不动的目标无法作出反应;④雨水、浮沫以及雪泥水会影响雷达的工作效果;⑤在转弯半径很小时,由于雷达视野受到限制,所以会影响系统的功能。三、自适应巡航控制系统工作的前提条件(1)与前车的车距(2)前车的车速(3)前车的位置(4)如果雷达同时侦测到多辆车,那么上述信息就被用来选择车辆,以便针对选择的车辆来进行相应的调节。四