
雷达、用于雷达的数据处理方法及设备、可读存储介质.pdf

小宏****aa

1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共36页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
雷达、用于雷达的数据处理方法及设备、可读存储介质.pdf
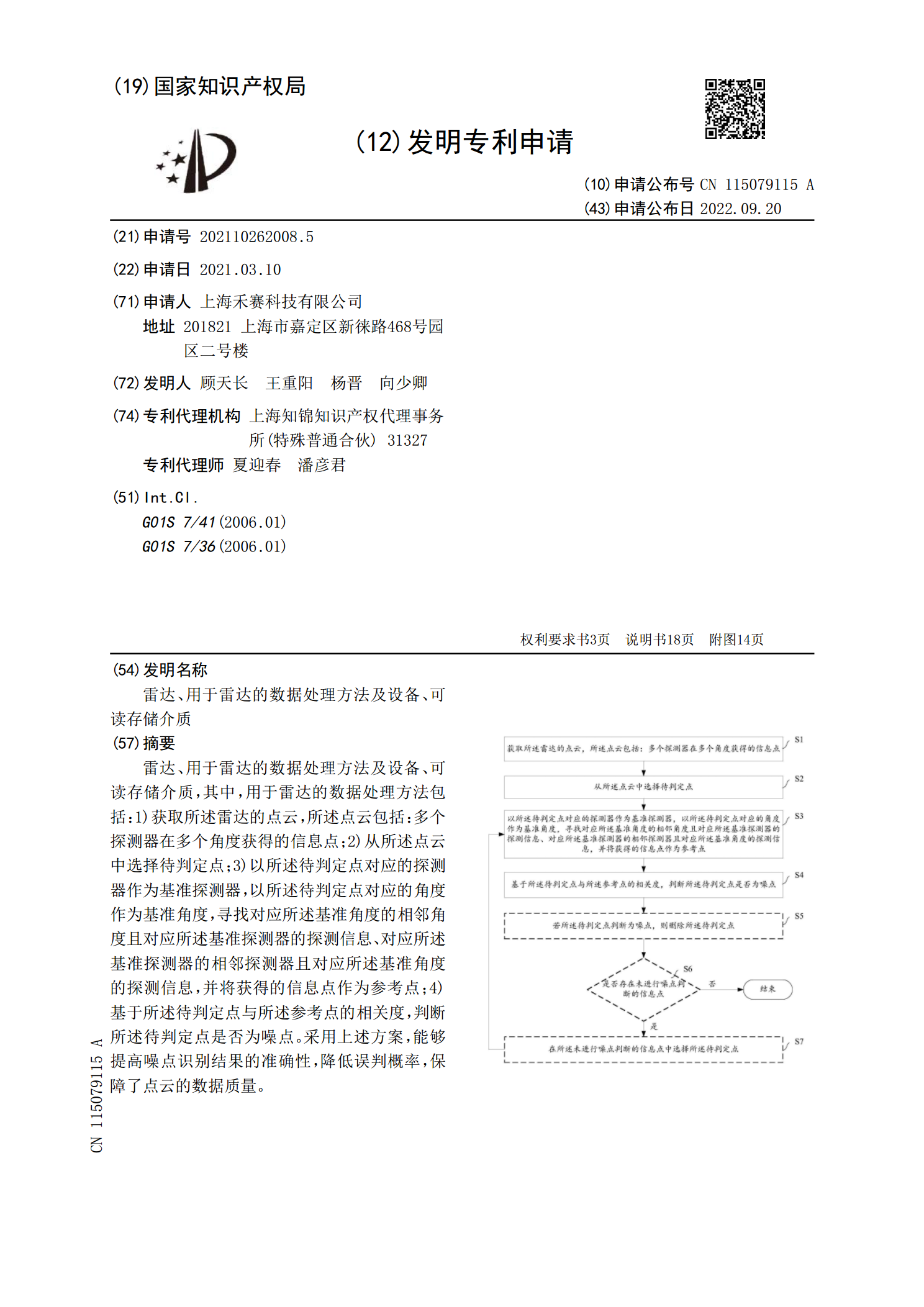
雷达、用于雷达的数据处理方法及设备、可读存储介质,其中,用于雷达的数据处理方法包括:1)获取所述雷达的点云,所述点云包括:多个探测器在多个角度获得的信息点;2)从所述点云中选择待判定点;3)以所述待判定点对应的探测器作为基准探测器,以所述待判定点对应的角度作为基准角度,寻找对应所述基准角度的相邻角度且对应所述基准探测器的探测信息、对应所述基准探测器的相邻探测器且对应所述基准角度的探测信息,并将获得的信息点作为参考点;4)基于所述待判定点与所述参考点的相关度,判断所述待判定点是否为噪点。采用上述方案,能够提
用于雷达驱动的检测方法、装置、设备及存储介质.pdf
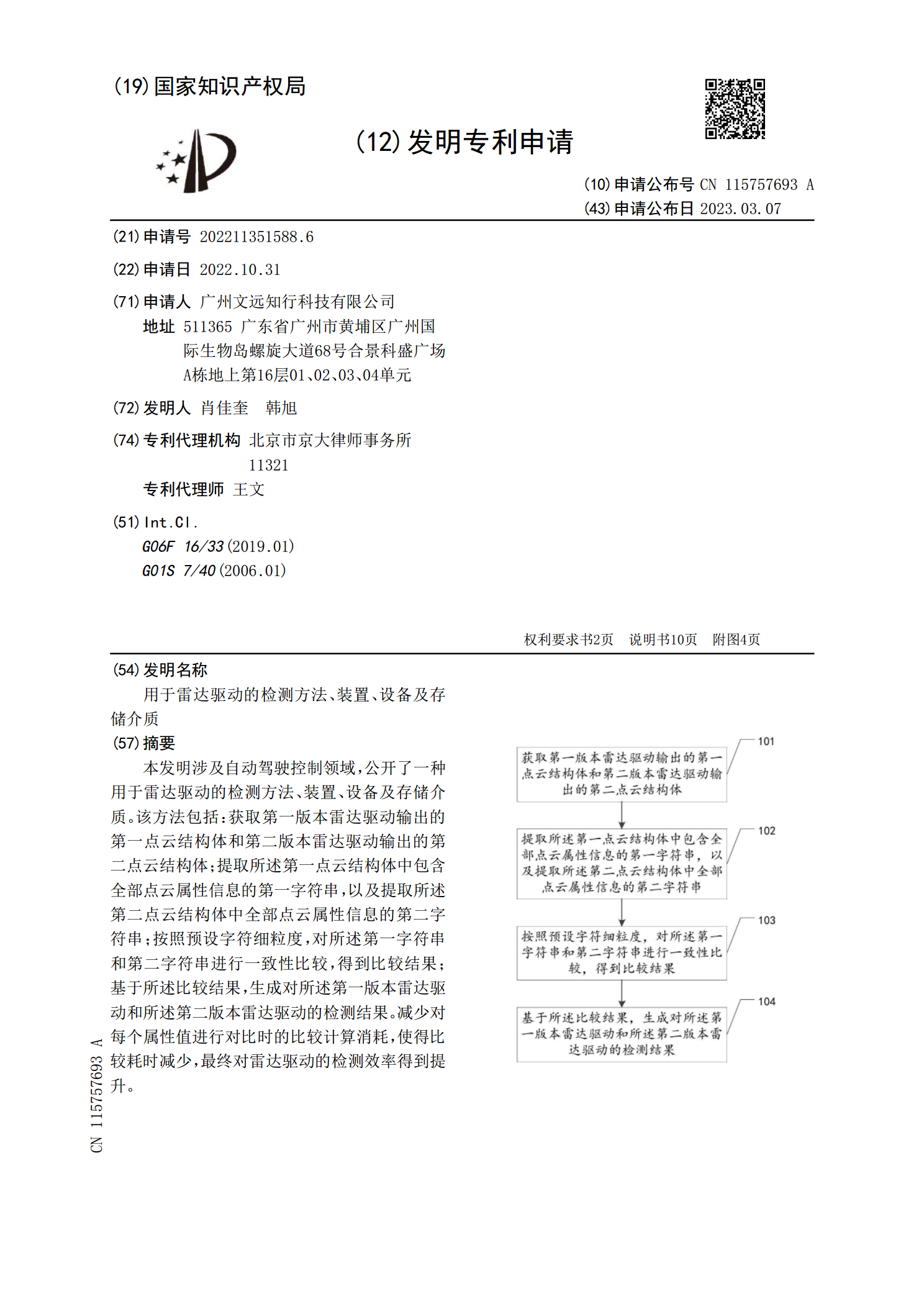
本发明涉及自动驾驶控制领域,公开了一种用于雷达驱动的检测方法、装置、设备及存储介质。该方法包括:获取第一版本雷达驱动输出的第一点云结构体和第二版本雷达驱动输出的第二点云结构体;提取所述第一点云结构体中包含全部点云属性信息的第一字符串,以及提取所述第二点云结构体中全部点云属性信息的第二字符串;按照预设字符细粒度,对所述第一字符串和第二字符串进行一致性比较,得到比较结果;基于所述比较结果,生成对所述第一版本雷达驱动和所述第二版本雷达驱动的检测结果。减少对每个属性值进行对比时的比较计算消耗,使得比较耗时减少,最
激光雷达数据处理方法、装置、设备及存储介质.pdf
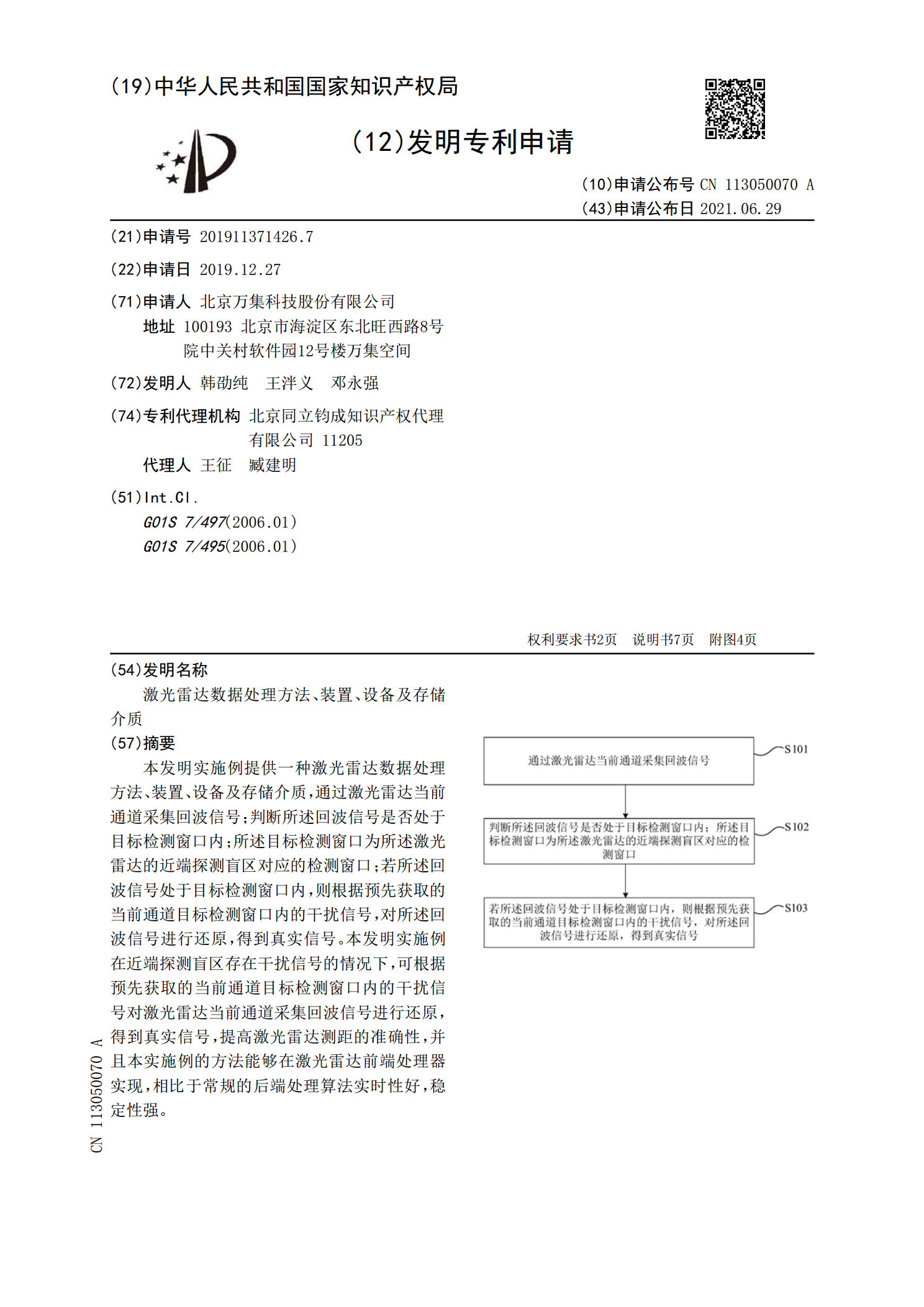
本发明实施例提供一种激光雷达数据处理方法、装置、设备及存储介质,通过激光雷达当前通道采集回波信号;判断所述回波信号是否处于目标检测窗口内;所述目标检测窗口为所述激光雷达的近端探测盲区对应的检测窗口;若所述回波信号处于目标检测窗口内,则根据预先获取的当前通道目标检测窗口内的干扰信号,对所述回波信号进行还原,得到真实信号。本发明实施例在近端探测盲区存在干扰信号的情况下,可根据预先获取的当前通道目标检测窗口内的干扰信号对激光雷达当前通道采集回波信号进行还原,得到真实信号,提高激光雷达测距的准确性,并且本实施例的

雷达点云数据处理方法、装置、设备以及存储介质.pdf
本公开提供了雷达点云数据处理的方法、装置、设备以及存储介质,涉及雷达点云、自动驾驶、深度学习技术领域。具体实现方案为:利用雷达点云数据中的目标检测框,确定目标物体所处的目标位置区域;将处于目标位置区域内的目标物体的每个点从雷达点云数据中移除;将物体模型添加到目标位置区域。本公开的实施例,通过将目标物体从雷达点云数据中移除,并将需要的三维模型添加到雷达点云数据中的目标位置区域,可以得到更加丰富的雷达点云数据。
针对雷达的检测方法、检测雷达、设备及存储介质.pdf
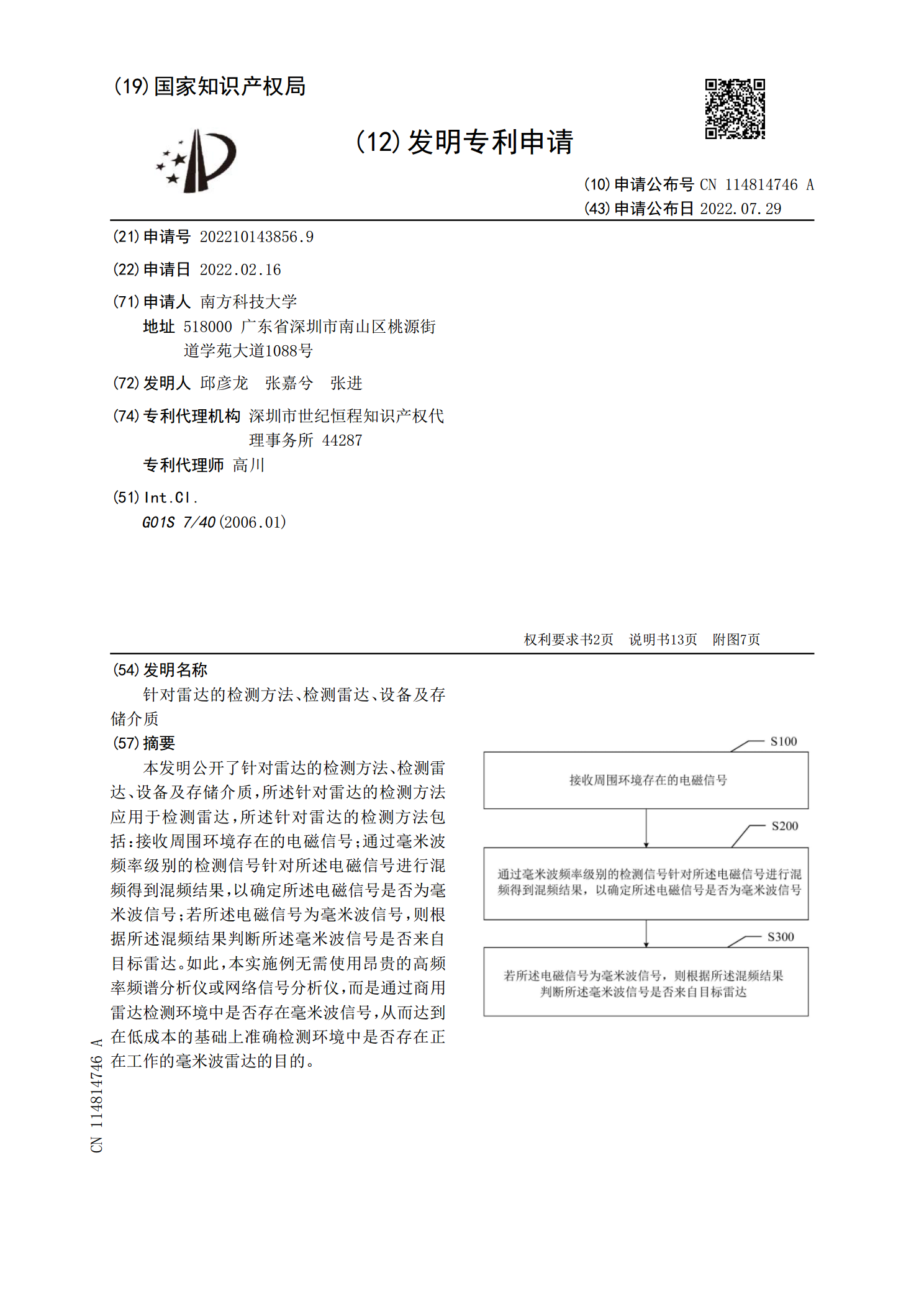
本发明公开了针对雷达的检测方法、检测雷达、设备及存储介质,所述针对雷达的检测方法应用于检测雷达,所述针对雷达的检测方法包括:接收周围环境存在的电磁信号;通过毫米波频率级别的检测信号针对所述电磁信号进行混频得到混频结果,以确定所述电磁信号是否为毫米波信号;若所述电磁信号为毫米波信号,则根据所述混频结果判断所述毫米波信号是否来自目标雷达。如此,本实施例无需使用昂贵的高频率频谱分析仪或网络信号分析仪,而是通过商用雷达检测环境中是否存在毫米波信号,从而达到在低成本的基础上准确检测环境中是否存在正在工作的毫米波雷达