
一种绳索牵引并联机器人快速终端滑模同步控制方法.pdf

醉香****mm

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种绳索牵引并联机器人快速终端滑模同步控制方法.pdf
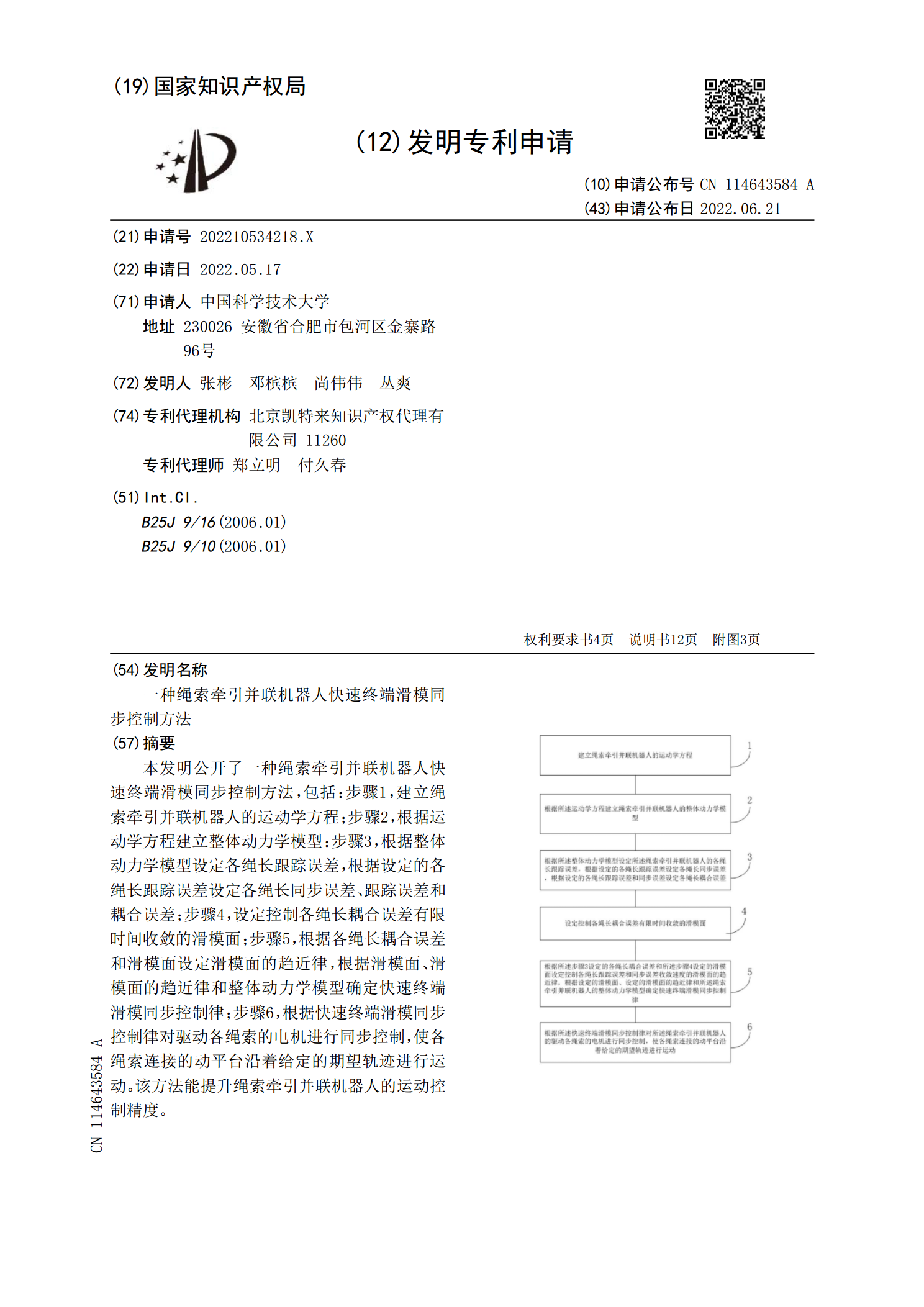
本发明公开了一种绳索牵引并联机器人快速终端滑模同步控制方法,包括:步骤1,建立绳索牵引并联机器人的运动学方程;步骤2,根据运动学方程建立整体动力学模型:步骤3,根据整体动力学模型设定各绳长跟踪误差,根据设定的各绳长跟踪误差设定各绳长同步误差、跟踪误差和耦合误差;步骤4,设定控制各绳长耦合误差有限时间收敛的滑模面;步骤5,根据各绳长耦合误差和滑模面设定滑模面的趋近律,根据滑模面、滑模面的趋近律和整体动力学模型确定快速终端滑模同步控制律;步骤6,根据快速终端滑模同步控制律对驱动各绳索的电机进行同步控制,使各绳
一种绳索牵引并联机器人弹性双环同步控制方法.pdf
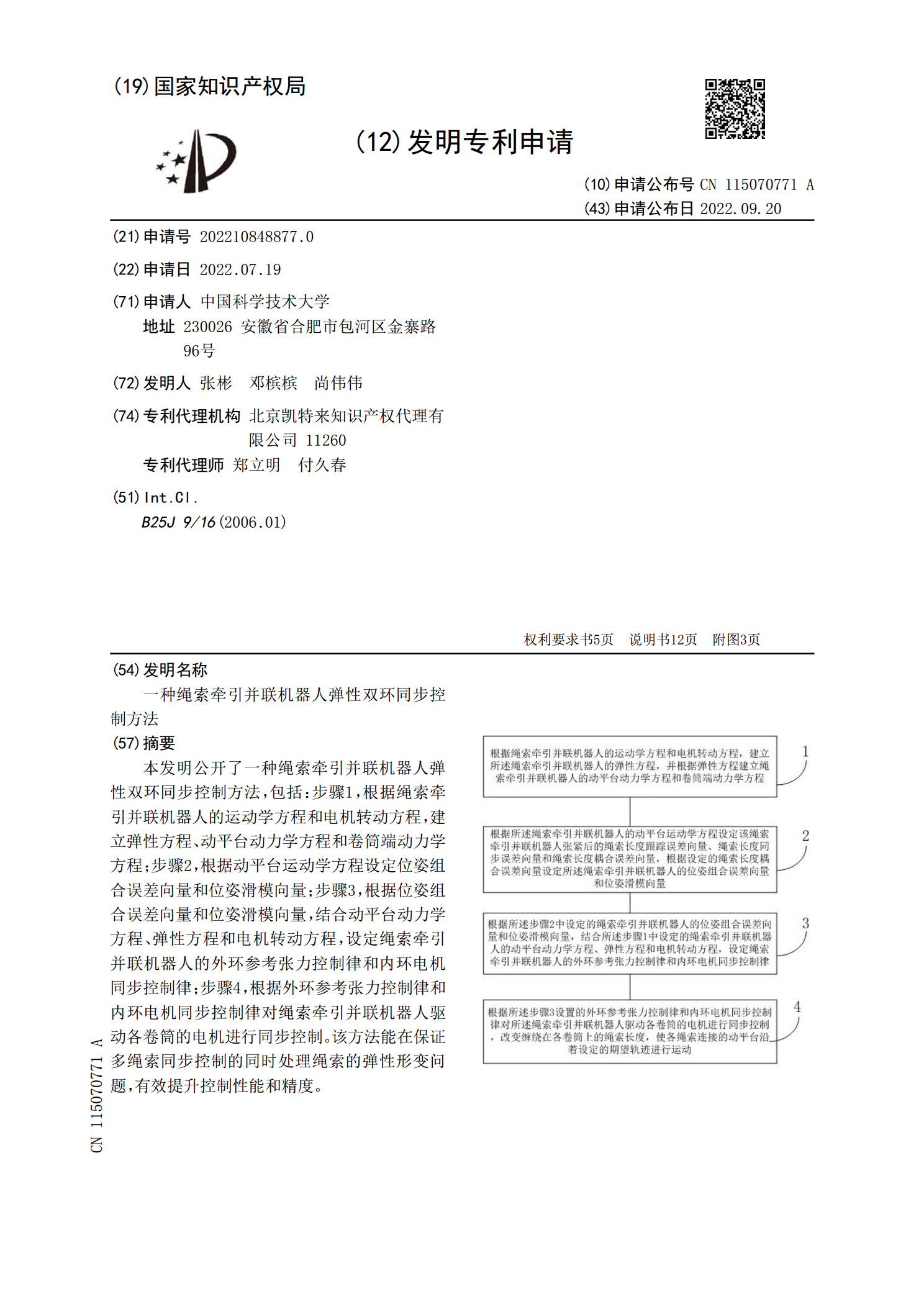
本发明公开了一种绳索牵引并联机器人弹性双环同步控制方法,包括:步骤1,根据绳索牵引并联机器人的运动学方程和电机转动方程,建立弹性方程、动平台动力学方程和卷筒端动力学方程;步骤2,根据动平台运动学方程设定位姿组合误差向量和位姿滑模向量;步骤3,根据位姿组合误差向量和位姿滑模向量,结合动平台动力学方程、弹性方程和电机转动方程,设定绳索牵引并联机器人的外环参考张力控制律和内环电机同步控制律;步骤4,根据外环参考张力控制律和内环电机同步控制律对绳索牵引并联机器人驱动各卷筒的电机进行同步控制。该方法能在保证多绳索同
一种绳索牵引并联机器人的绳索共面装置.pdf
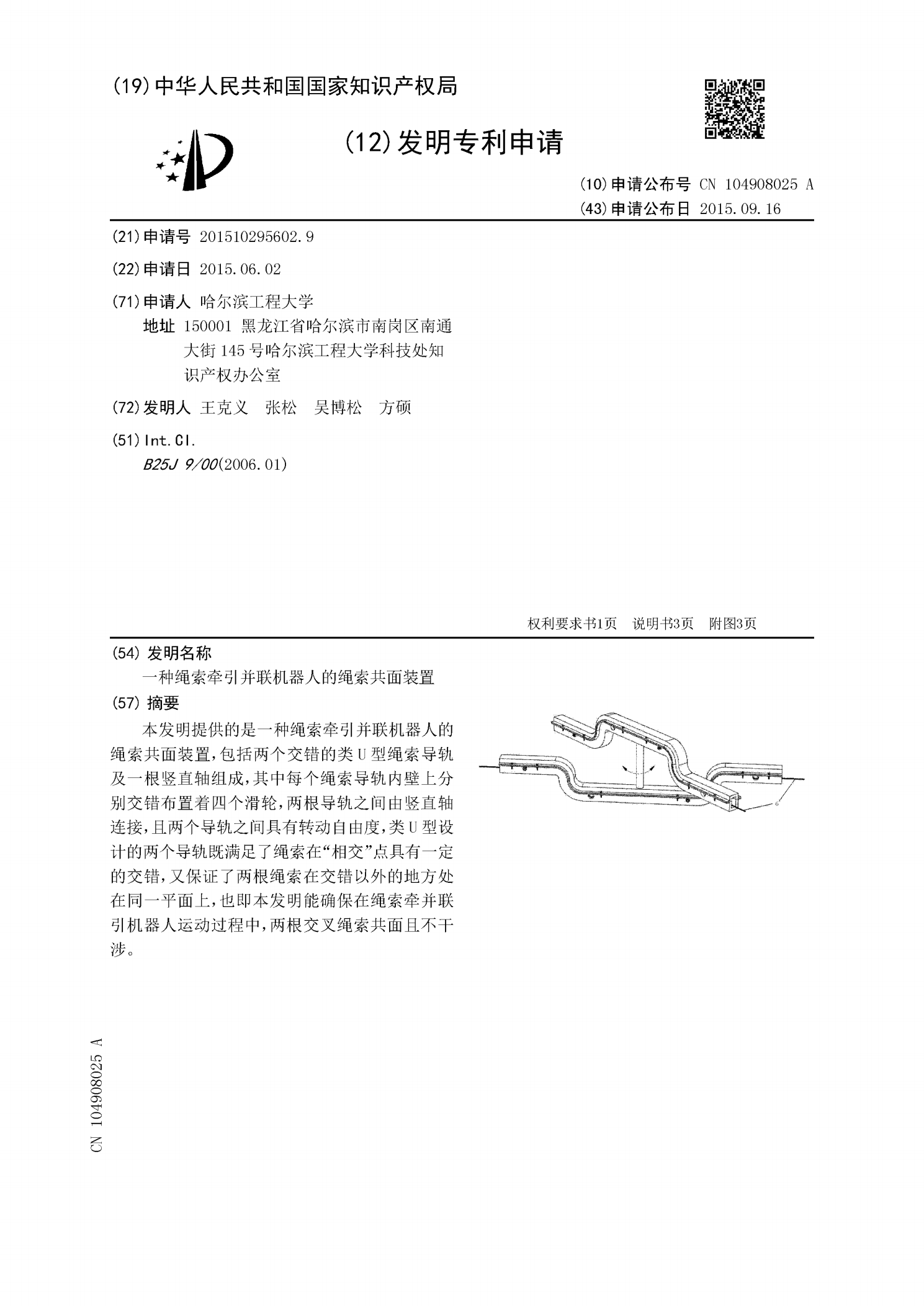
本发明提供的是一种绳索牵引并联机器人的绳索共面装置,包括两个交错的类U型绳索导轨及一根竖直轴组成,其中每个绳索导轨内壁上分别交错布置着四个滑轮,两根导轨之间由竖直轴连接,且两个导轨之间具有转动自由度,类U型设计的两个导轨既满足了绳索在“相交”点具有一定的交错,又保证了两根绳索在交错以外的地方处在同一平面上,也即本发明能确保在绳索牵并联引机器人运动过程中,两根交叉绳索共面且不干涉。
一种绳索牵引并联机器人重构规划方法.pdf
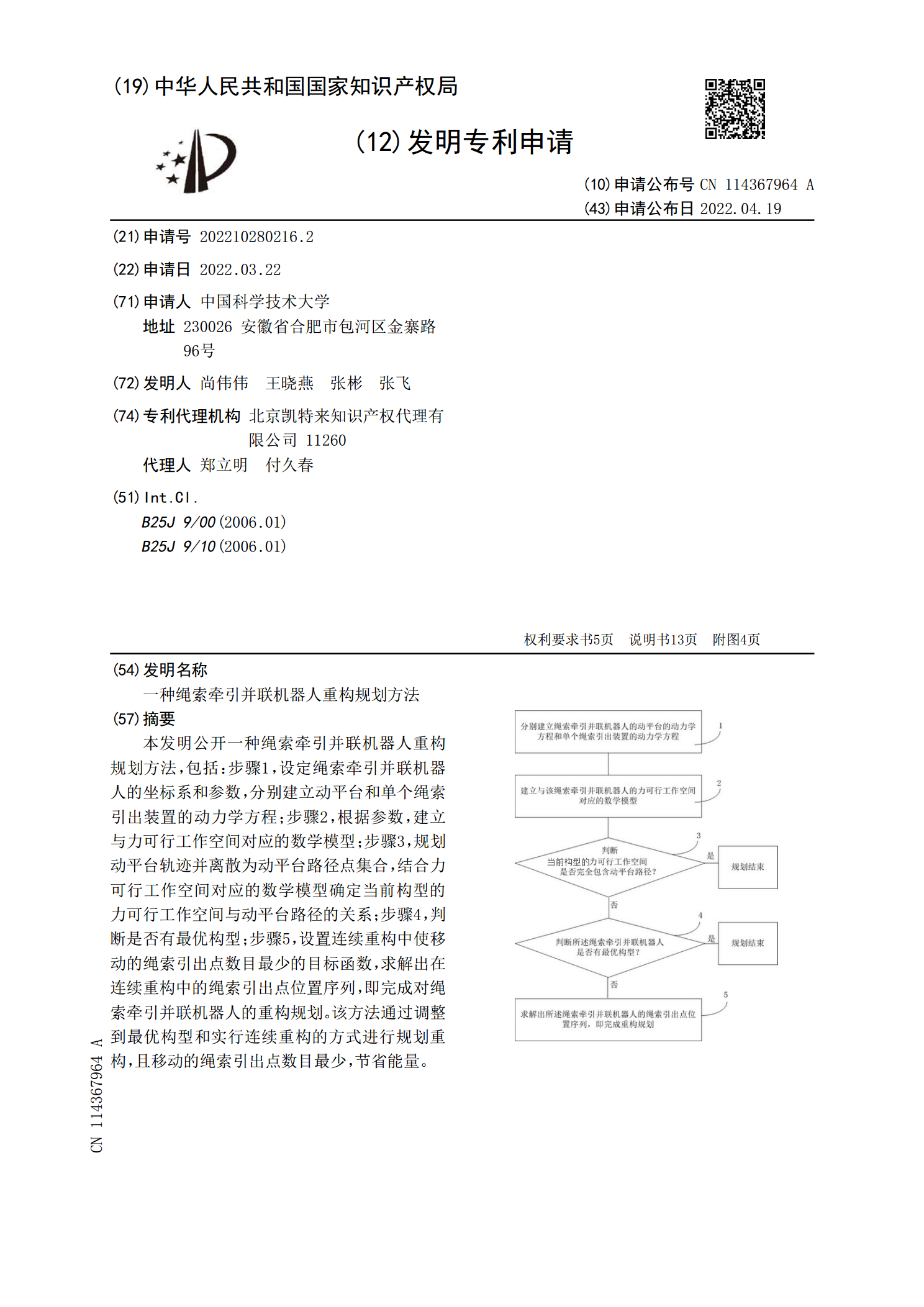
本发明公开一种绳索牵引并联机器人重构规划方法,包括:步骤1,设定绳索牵引并联机器人的坐标系和参数,分别建立动平台和单个绳索引出装置的动力学方程;步骤2,根据参数,建立与力可行工作空间对应的数学模型;步骤3,规划动平台轨迹并离散为动平台路径点集合,结合力可行工作空间对应的数学模型确定当前构型的力可行工作空间与动平台路径的关系;步骤4,判断是否有最优构型;步骤5,设置连续重构中使移动的绳索引出点数目最少的目标函数,求解出在连续重构中的绳索引出点位置序列,即完成对绳索牵引并联机器人的重构规划。该方法通过调整到最

一种连续非奇异快速终端滑模控制方法.docx
一种连续非奇异快速终端滑模控制方法导言随着科学技术的发展,在控制领域,滑模控制已经成为一种重要的非线性控制方法之一。它可以通过快速和准确的控制系统构建来应对各种复杂的控制问题,同时控制效果也比传统控制方法更优秀。近年来,快速终端滑模控制被广泛研究和应用,能够应对系统的动态变化,提高系统鲁棒性和响应速度。本文将介绍一种连续非奇异快速终端滑模控制方法,通过详细的理论阐述和实验验证,证明该方法在实际应用中具有很好的效果。快速终端滑模控制方法快速终端滑模控制是一种基于非线性滑模控制的改进方法,它充分利用快速终端滑