
共轴双旋翼无人机的喷气式姿态控制装置及姿态控制方法.pdf

邻家****文章

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
共轴双旋翼无人机的喷气式姿态控制装置及姿态控制方法.pdf
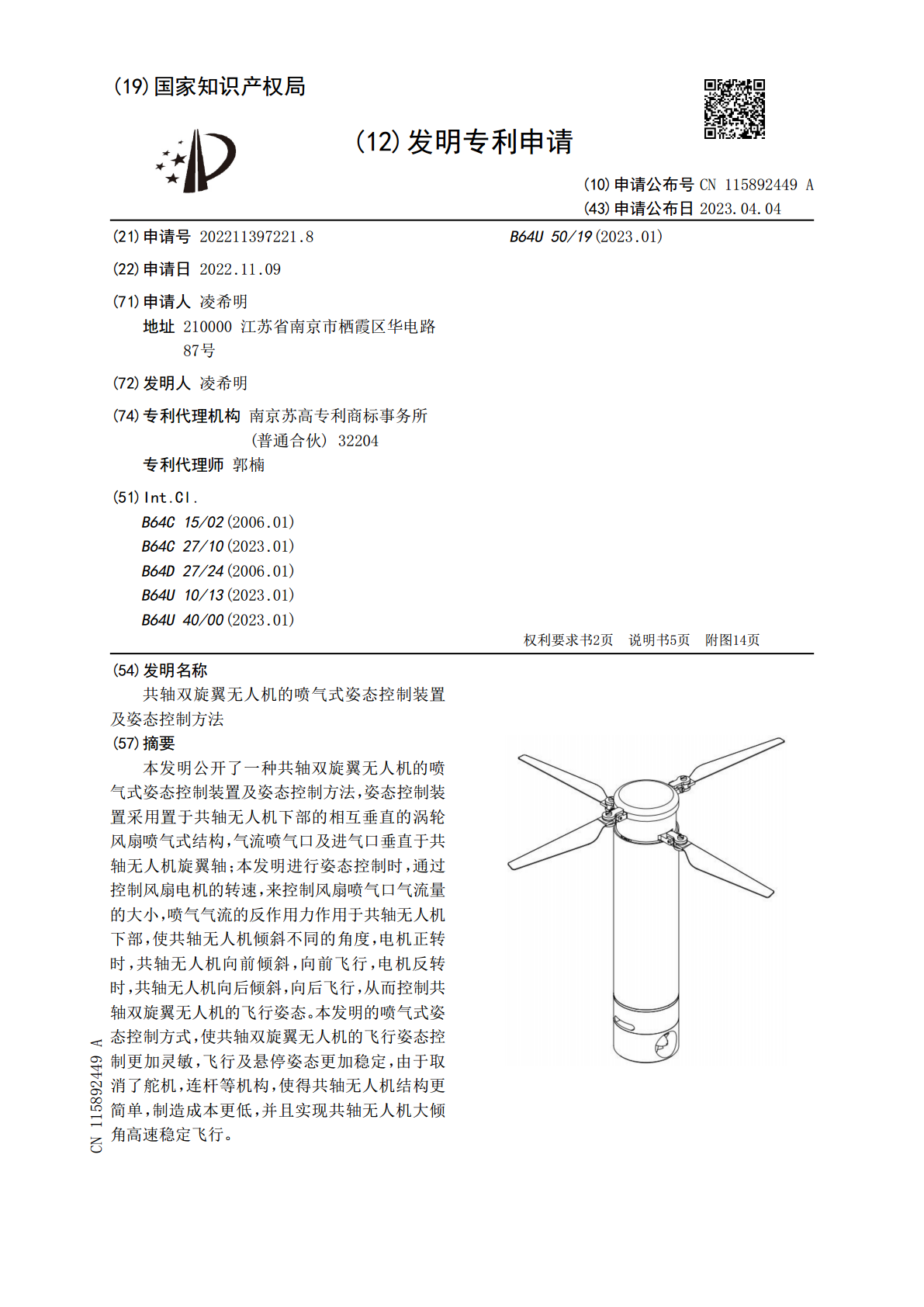
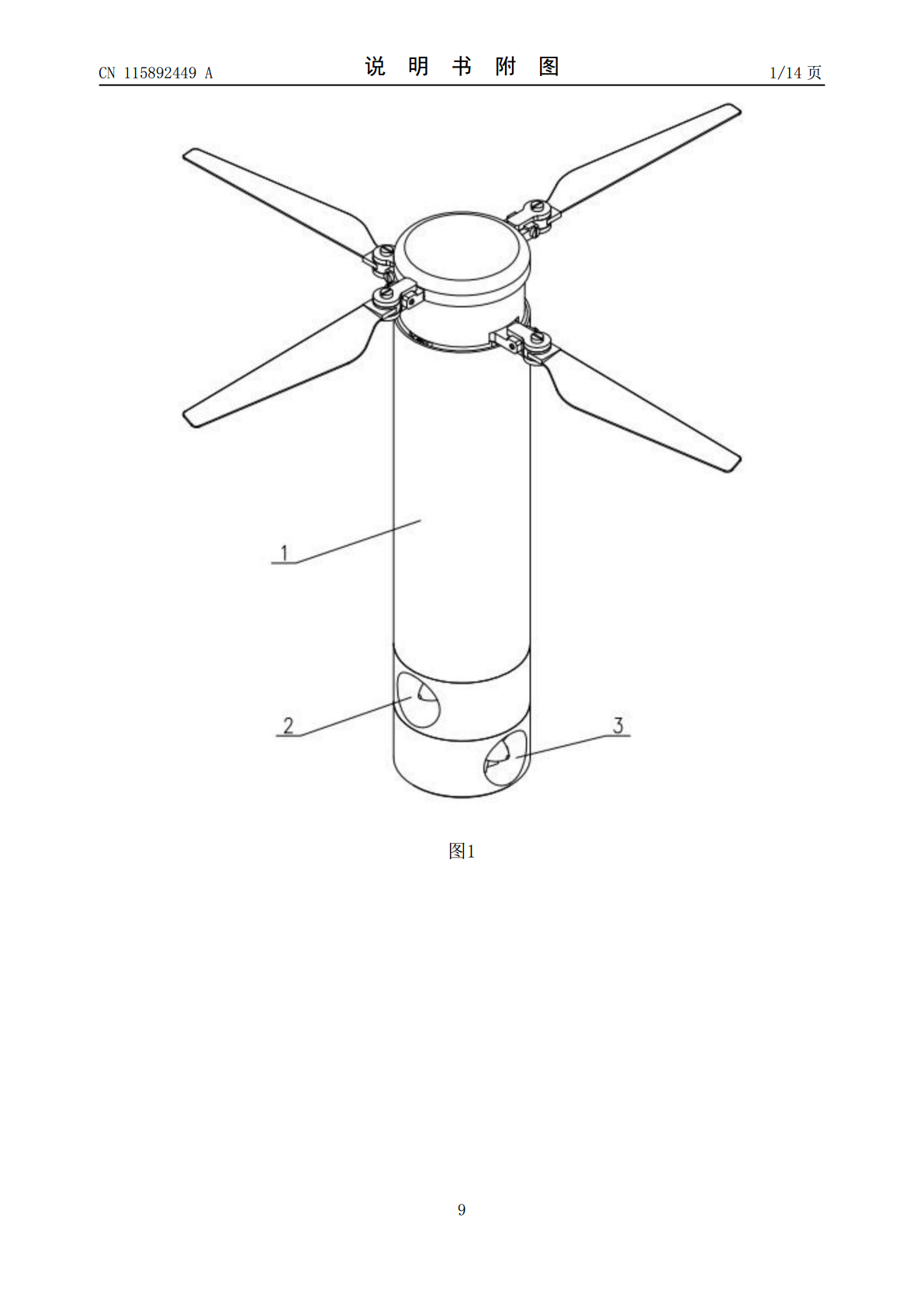
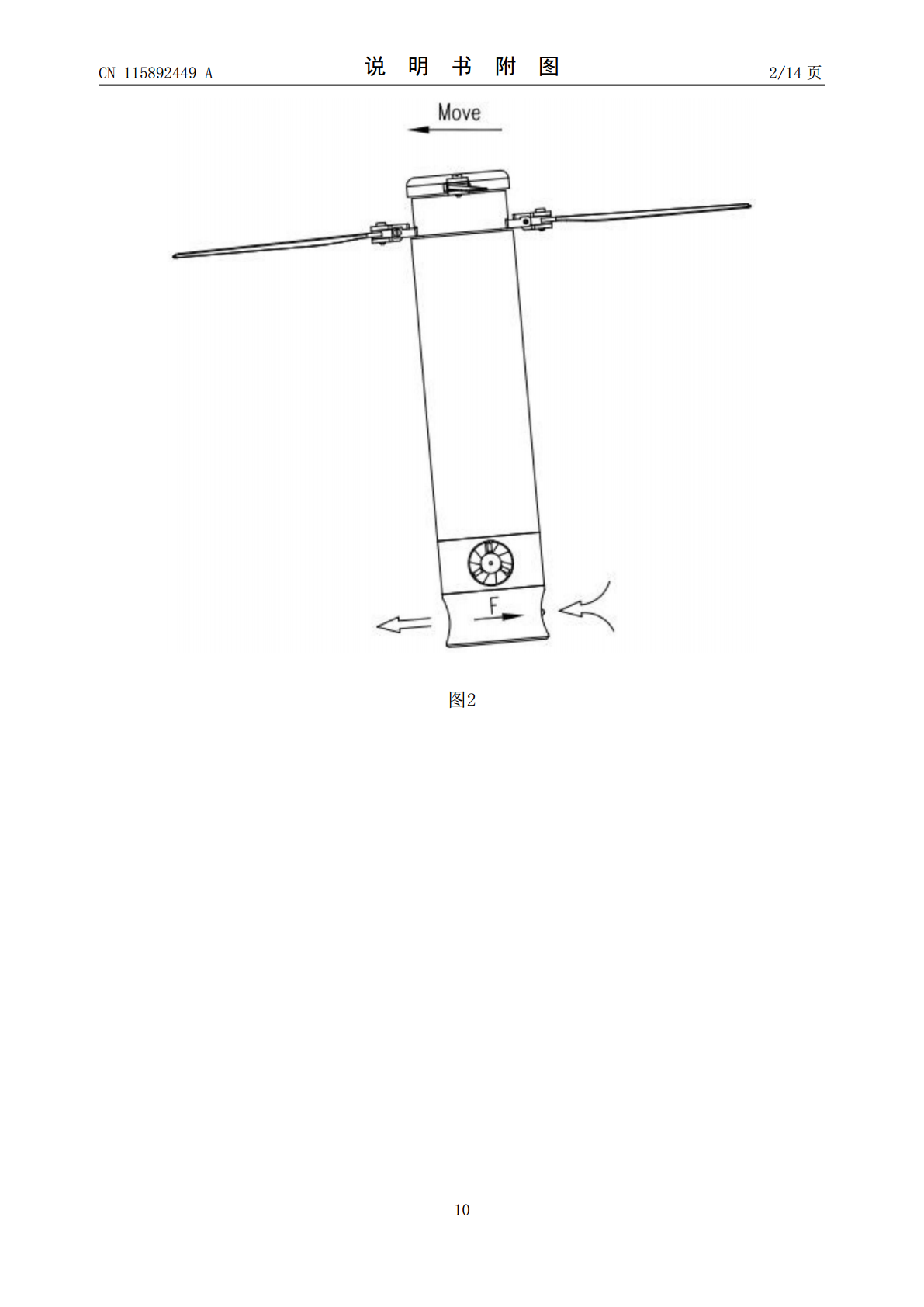
本发明公开了一种共轴双旋翼无人机的喷气式姿态控制装置及姿态控制方法,姿态控制装置采用置于共轴无人机下部的相互垂直的涡轮风扇喷气式结构,气流喷气口及进气口垂直于共轴无人机旋翼轴;本发明进行姿态控制时,通过控制风扇电机的转速,来控制风扇喷气口气流量的大小,喷气气流的反作用力作用于共轴无人机下部,使共轴无人机倾斜不同的角度,电机正转时,共轴无人机向前倾斜,向前飞行,电机反转时,共轴无人机向后倾斜,向后飞行,从而控制共轴双旋翼无人机的飞行姿态。本发明的喷气式姿态控制方式,使共轴双旋翼无人机的飞行姿态控制更加灵敏,

受扰四旋翼无人机姿态与高度系统的非线性鲁棒控制方法.pdf
本发明属于无人机控制技术领域,具体为受扰四旋翼无人机姿态与高度系统的非线性鲁棒控制方法。本发明方法首先在确定合适的地球固联坐标系和机体坐标系为前提条件下,构建四旋翼无人机的空气动力学方程,同时引入的干扰量即滚转扰动量、俯仰扰动量、偏航扰动量和高度扰动量;接着,确定好状态收敛函数后,根据受扰情况下四旋翼无人机的非线性动力学方程确定非线性鲁棒控制系统的输入量;然后,将由基于神经网络的自适应法则、扰动观测器和非线性鲁棒控制方法结合构成姿态与高度系统非线性鲁棒控制器;最后使用Lyapunov稳定性理论对构建的实时

一种四旋翼无人机姿态自适应扰动实时补偿控制方法.pdf
本发明公开了一种四旋翼无人机姿态自适应扰动实时补偿控制方法,包括以下步骤:1)建立考虑系统总和扰动的四旋翼无人机姿态控制系统模型;2)设计四旋翼无人机姿态跟踪自适应线性扩张状态观测器;3)设计四旋翼无人机姿态跟踪滑模控制律;4)四旋翼无人机系统稳定性分析。发明所设计的自适应线性扩张状态观测器可依据扰动量大小的变化自动修正观测器增益参数,从而可以使得观测器的估计误差始终保持在一个较高的精度内。
基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法.pdf
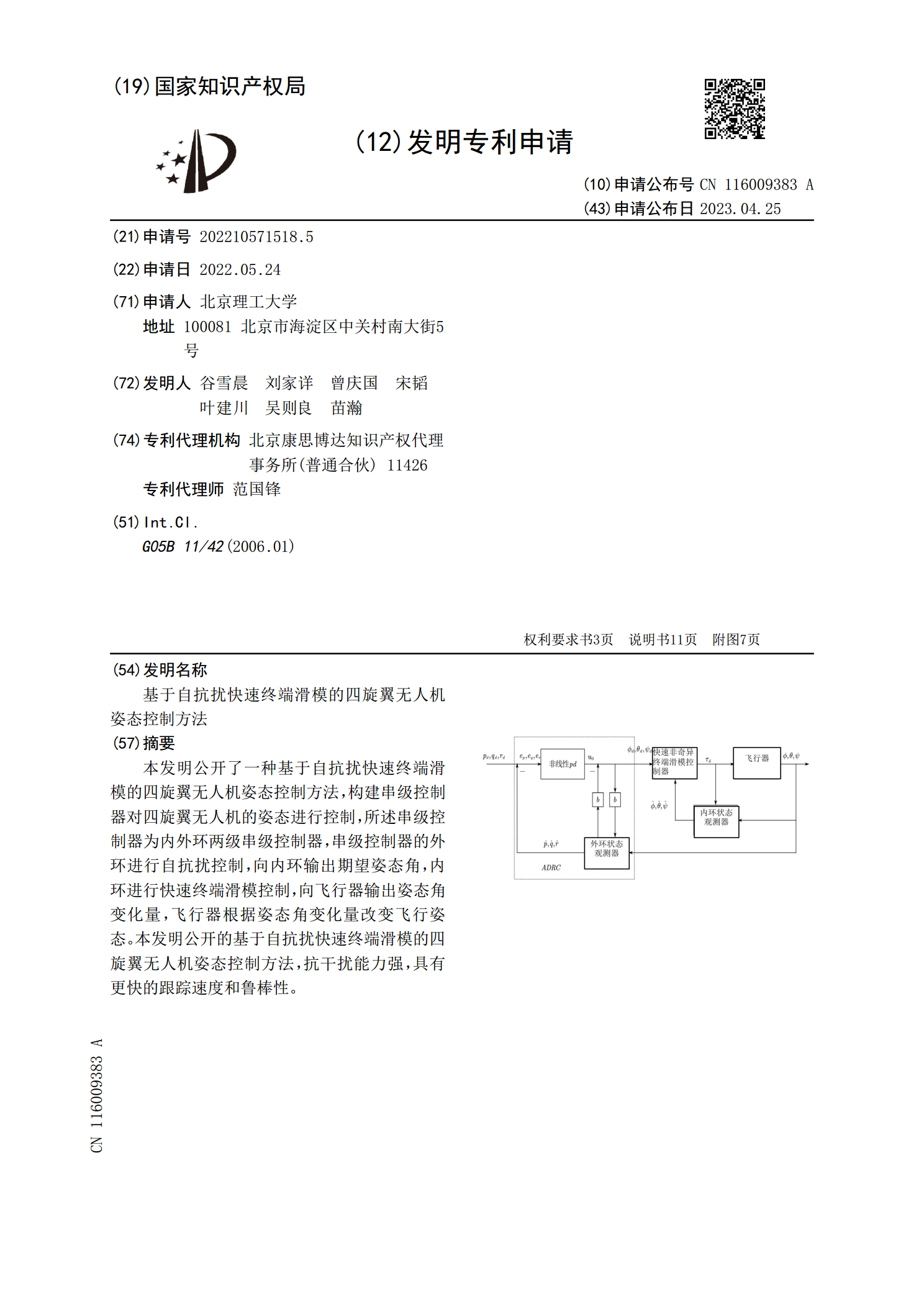
本发明公开了一种基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法,构建串级控制器对四旋翼无人机的姿态进行控制,所述串级控制器为内外环两级串级控制器,串级控制器的外环进行自抗扰控制,向内环输出期望姿态角,内环进行快速终端滑模控制,向飞行器输出姿态角变化量,飞行器根据姿态角变化量改变飞行姿态。本发明公开的基于自抗扰快速终端滑模的四旋翼无人机姿态控制方法,抗干扰能力强,具有更快的跟踪速度和鲁棒性。

电力巡线自转旋翼无人机姿态控制算法的研究的开题报告.docx
电力巡线自转旋翼无人机姿态控制算法的研究的开题报告一、选题背景电力巡线自转旋翼无人机具有飞行灵活、操作简便、效率高等优点,是电力巡检的一种新型技术手段。然而,飞行中存在的姿态变化、气流干扰等问题会影响无人机的稳定性和安全性,需要对其姿态进行控制。因此,研究电力巡线自转旋翼无人机姿态控制算法,对其进一步的发展具有重要意义。二、研究内容1.电力巡线自转旋翼无人机的姿态控制原理;2.研究电力巡线自转旋翼无人机的姿态控制算法,包括控制模型的建立、算法设计等;3.仿真实验与实际测试,验证算法的有效性。三、研究方法1