
基于声学定位的自动控量点胶装置及点胶方法、点胶设备.pdf

邻家****mk

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于声学定位的自动控量点胶装置及点胶方法、点胶设备.pdf
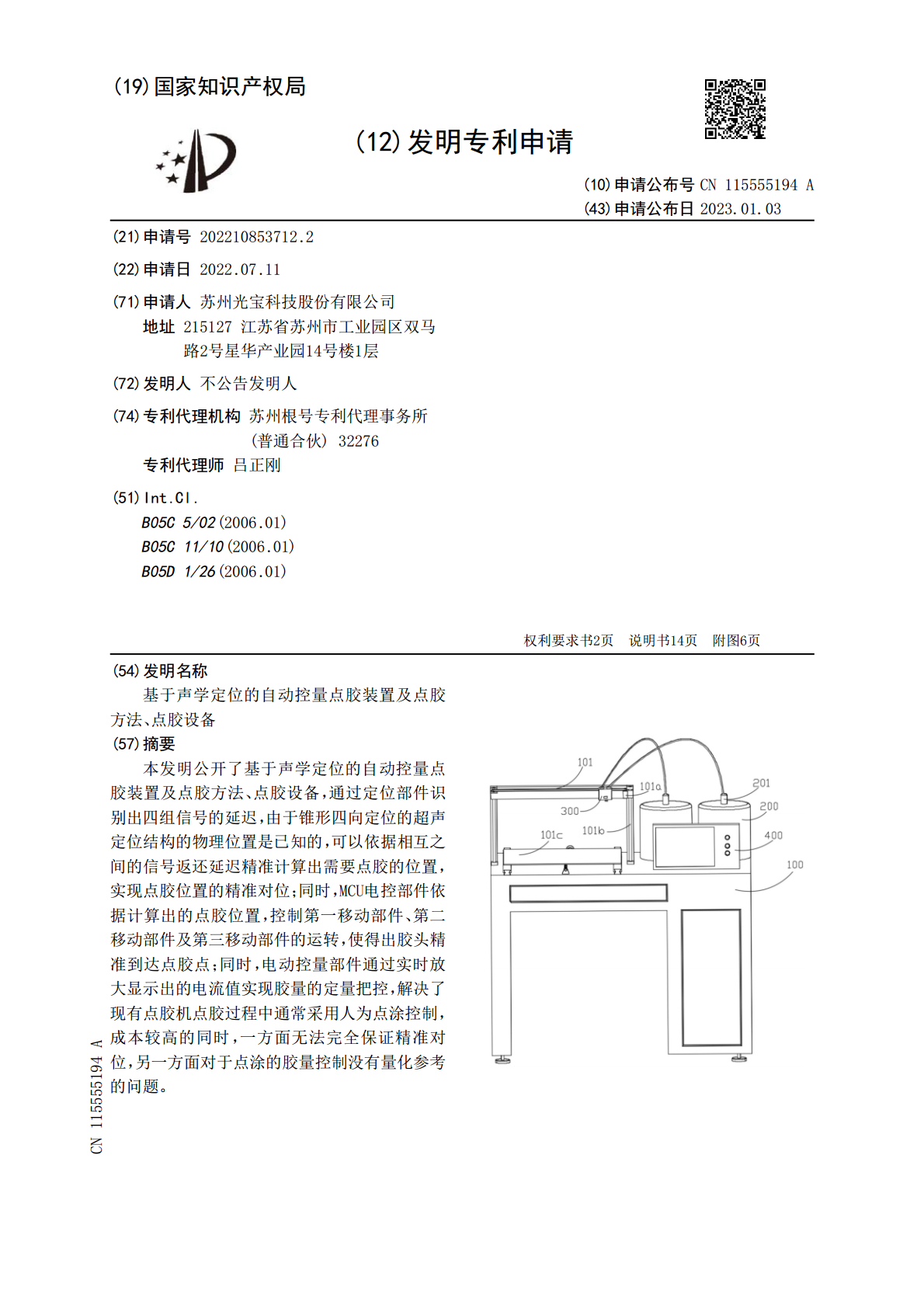
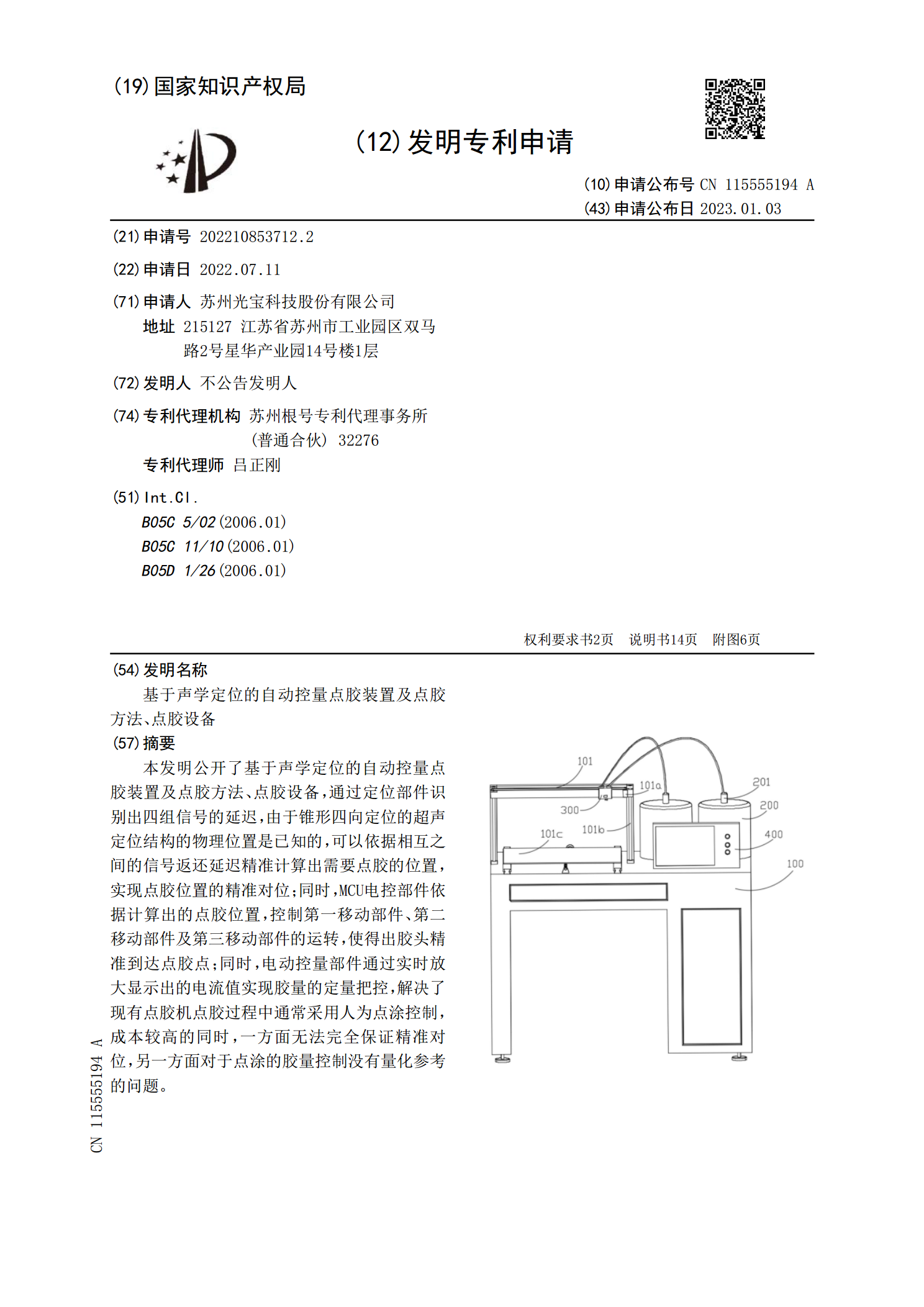
本发明公开了基于声学定位的自动控量点胶装置及点胶方法、点胶设备,通过定位部件识别出四组信号的延迟,由于锥形四向定位的超声定位结构的物理位置是已知的,可以依据相互之间的信号返还延迟精准计算出需要点胶的位置,实现点胶位置的精准对位;同时,MCU电控部件依据计算出的点胶位置,控制第一移动部件、第二移动部件及第三移动部件的运转,使得出胶头精准到达点胶点;同时,电动控量部件通过实时放大显示出的电流值实现胶量的定量把控,解决了现有点胶机点胶过程中通常采用人为点涂控制,成本较高的同时,一方面无法完全保证精准对位,另一方
基于声学定位的自动控量点胶装置及点胶方法、点胶设备.pdf
本发明公开了基于声学定位的自动控量点胶装置及点胶方法、点胶设备,通过定位部件识别出四组信号的延迟,由于锥形四向定位的超声定位结构的物理位置是已知的,可以依据相互之间的信号返还延迟精准计算出需要点胶的位置,实现点胶位置的精准对位;同时,MCU电控部件依据计算出的点胶位置,控制第一移动部件、第二移动部件及第三移动部件的运转,使得出胶头精准到达点胶点;同时,电动控量部件通过实时放大显示出的电流值实现胶量的定量把控,解决了现有点胶机点胶过程中通常采用人为点涂控制,成本较高的同时,一方面无法完全保证精准对位,另一方
一种点胶胶量检测方法和装置、点胶设备.pdf
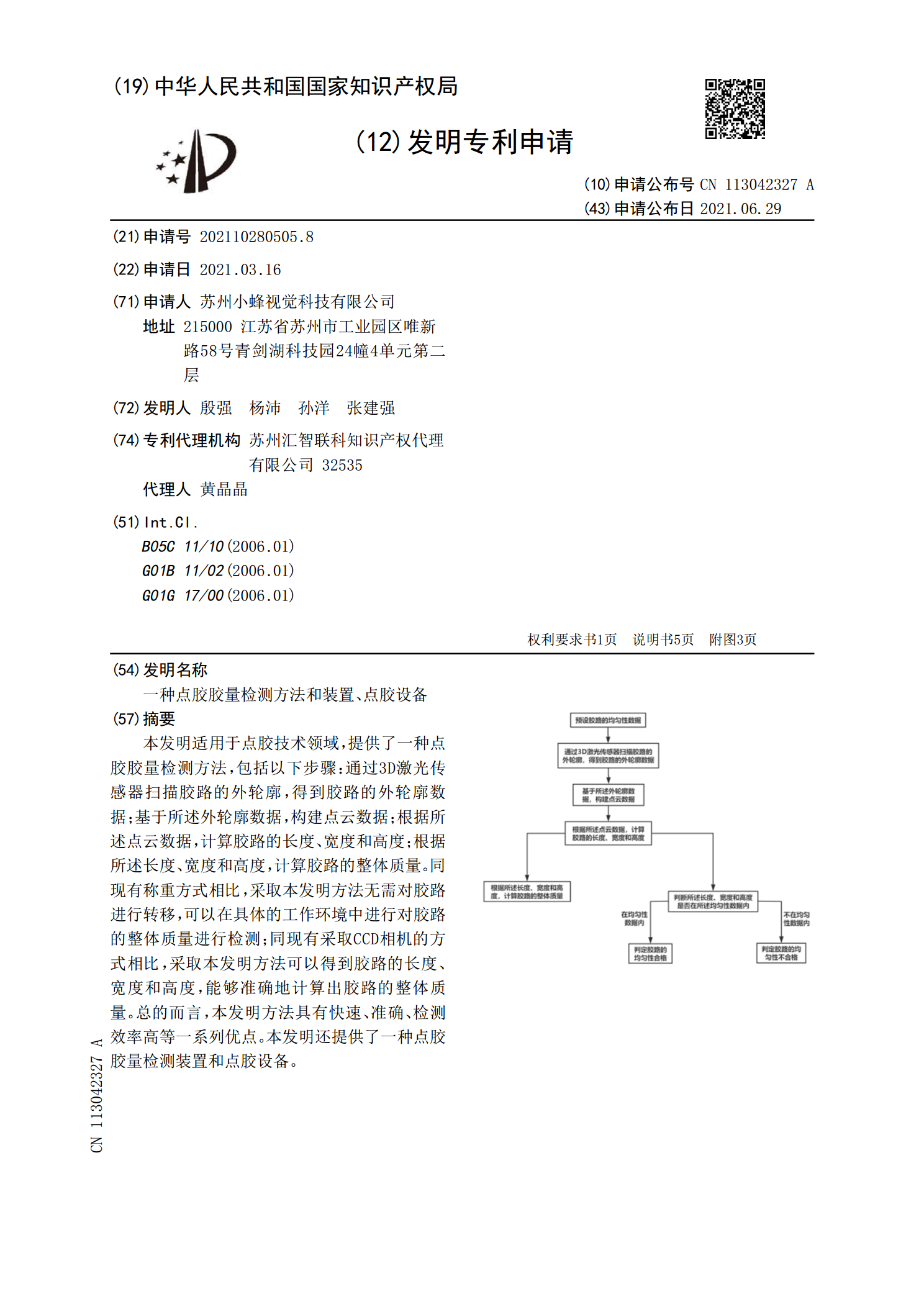
本发明适用于点胶技术领域,提供了一种点胶胶量检测方法,包括以下步骤:通过3D激光传感器扫描胶路的外轮廓,得到胶路的外轮廓数据;基于所述外轮廓数据,构建点云数据;根据所述点云数据,计算胶路的长度、宽度和高度;根据所述长度、宽度和高度,计算胶路的整体质量。同现有称重方式相比,采取本发明方法无需对胶路进行转移,可以在具体的工作环境中进行对胶路的整体质量进行检测;同现有采取CCD相机的方式相比,采取本发明方法可以得到胶路的长度、宽度和高度,能够准确地计算出胶路的整体质量。总的而言,本发明方法具有快速、准确、检测效
自动点胶生产线的点胶装置.pdf
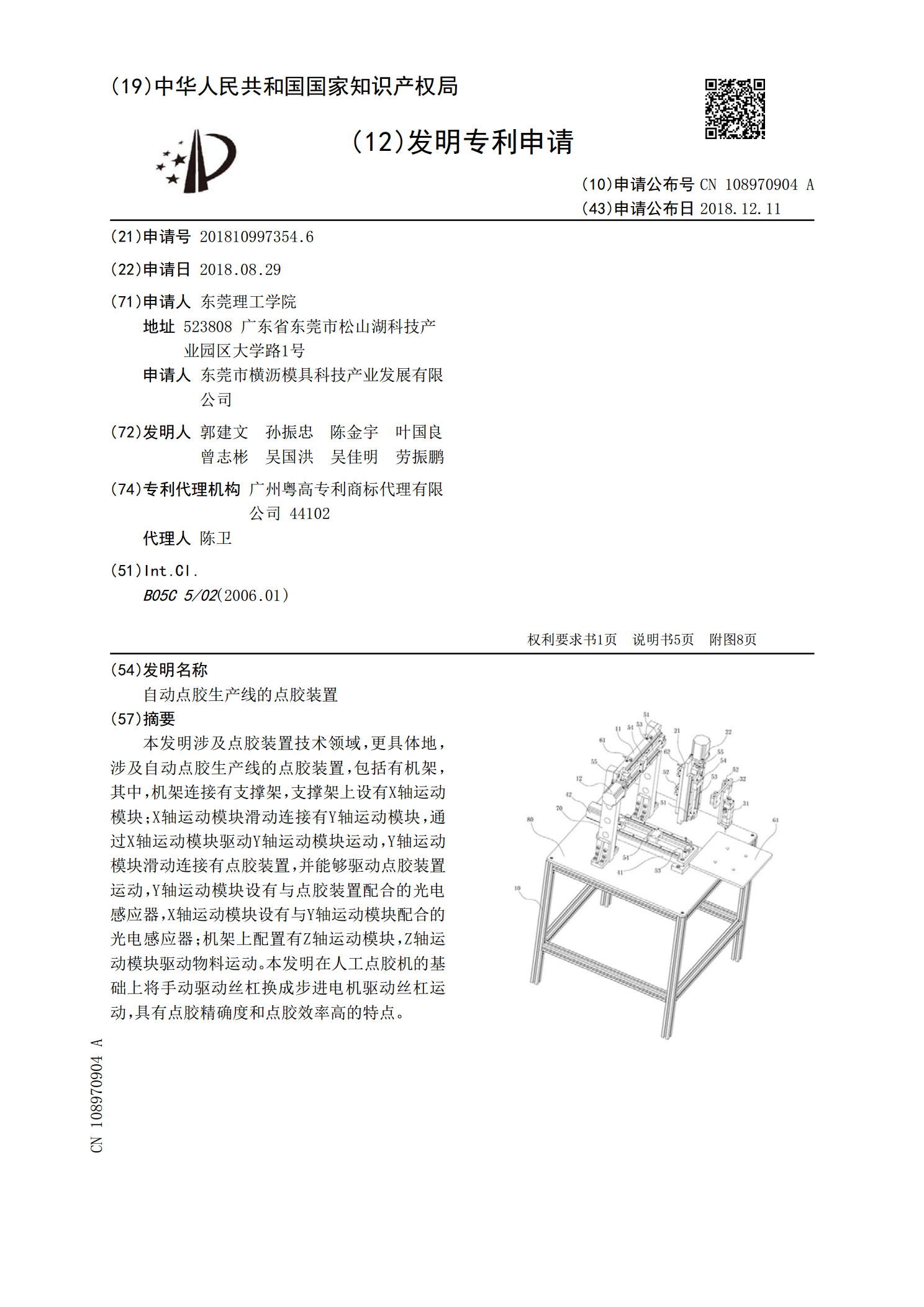
本发明涉及点胶装置技术领域,更具体地,涉及自动点胶生产线的点胶装置,包括有机架,其中,机架连接有支撑架,支撑架上设有X轴运动模块;X轴运动模块滑动连接有Y轴运动模块,通过X轴运动模块驱动Y轴运动模块运动,Y轴运动模块滑动连接有点胶装置,并能够驱动点胶装置运动,Y轴运动模块设有与点胶装置配合的光电感应器,X轴运动模块设有与Y轴运动模块配合的光电感应器;机架上配置有Z轴运动模块,Z轴运动模块驱动物料运动。本发明在人工点胶机的基础上将手动驱动丝杠换成步进电机驱动丝杠运动,具有点胶精确度和点胶效率高的特点。
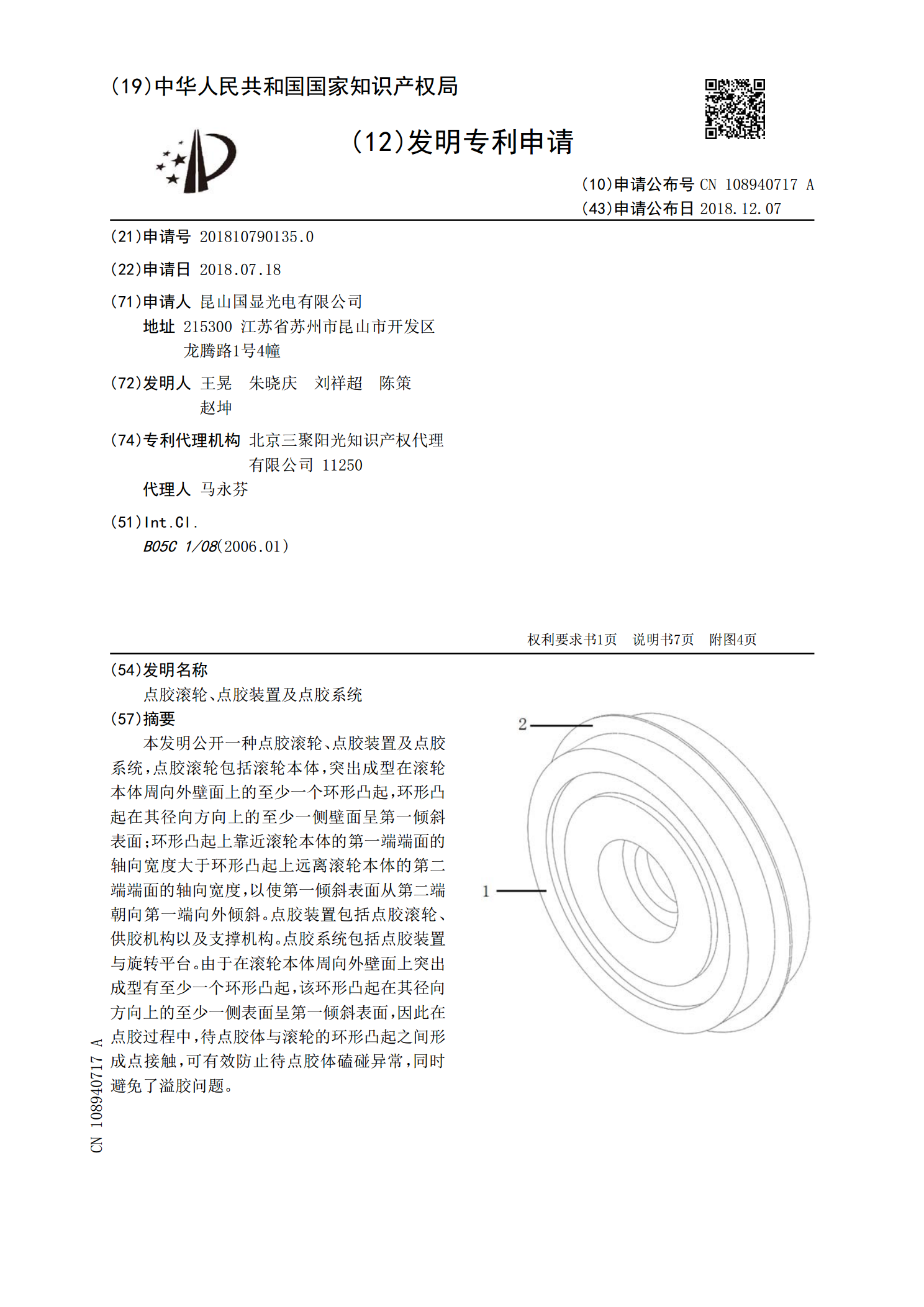
点胶滚轮、点胶装置及点胶系统.pdf
本发明公开一种点胶滚轮、点胶装置及点胶系统,点胶滚轮包括滚轮本体,突出成型在滚轮本体周向外壁面上的至少一个环形凸起,环形凸起在其径向方向上的至少一侧壁面呈第一倾斜表面;环形凸起上靠近滚轮本体的第一端端面的轴向宽度大于环形凸起上远离滚轮本体的第二端端面的轴向宽度,以使第一倾斜表面从第二端朝向第一端向外倾斜。点胶装置包括点胶滚轮、供胶机构以及支撑机构。点胶系统包括点胶装置与旋转平台。由于在滚轮本体周向外壁面上突出成型有至少一个环形凸起,该环形凸起在其径向方向上的至少一侧表面呈第一倾斜表面,因此在点胶过程中,待