
水稻联合收割机辅助导航方法及装置.pdf

一条****轩吗


1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
水稻联合收割机辅助导航方法及装置.pdf
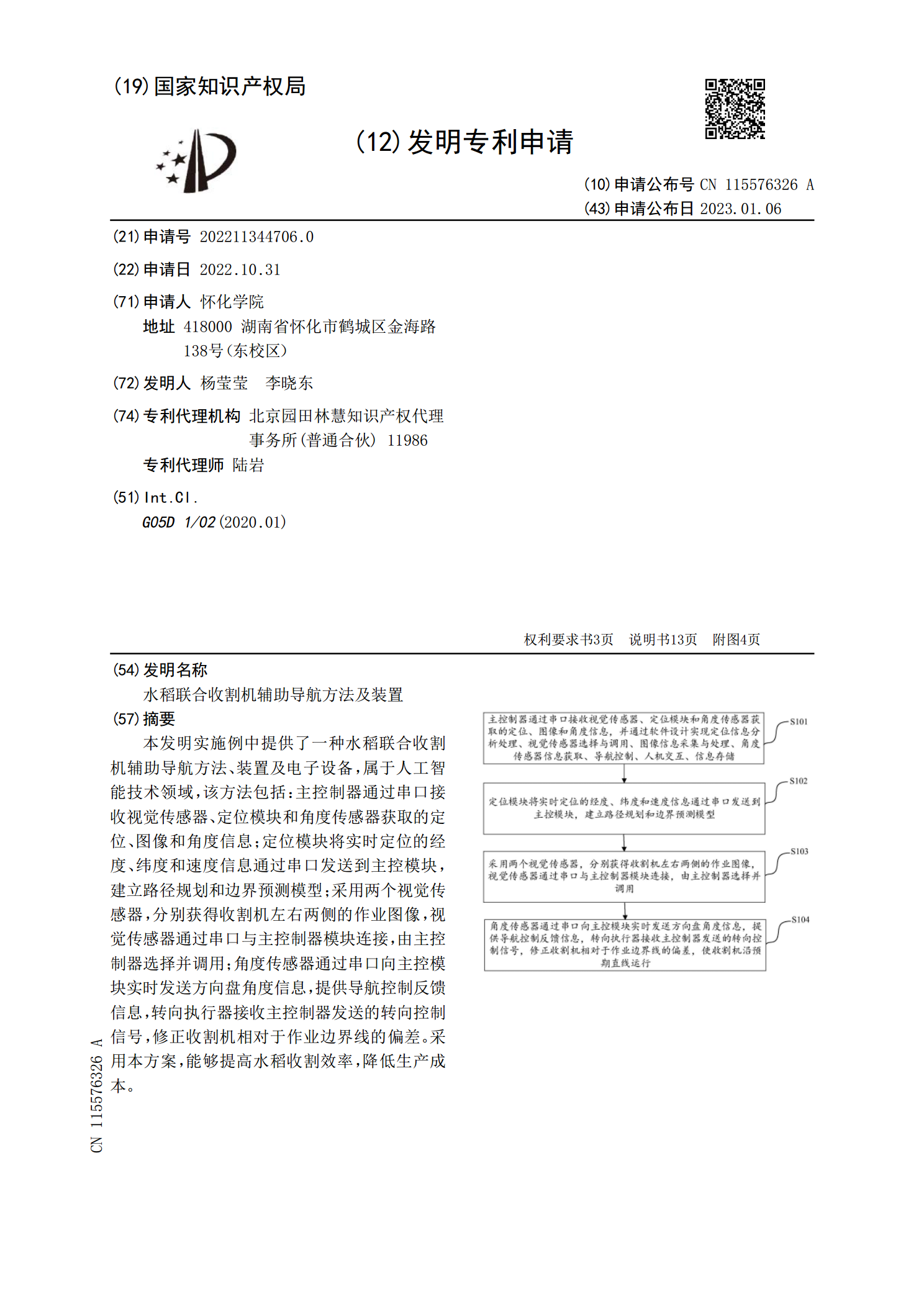
本发明实施例中提供了一种水稻联合收割机辅助导航方法、装置及电子设备,属于人工智能技术领域,该方法包括:主控制器通过串口接收视觉传感器、定位模块和角度传感器获取的定位、图像和角度信息;定位模块将实时定位的经度、纬度和速度信息通过串口发送到主控模块,建立路径规划和边界预测模型;采用两个视觉传感器,分别获得收割机左右两侧的作业图像,视觉传感器通过串口与主控制器模块连接,由主控制器选择并调用;角度传感器通过串口向主控模块实时发送方向盘角度信息,提供导航控制反馈信息,转向执行器接收主控制器发送的转向控制信号,修正收
水稻联合收割机脱粒装置的自适应控制方法及装置.pdf
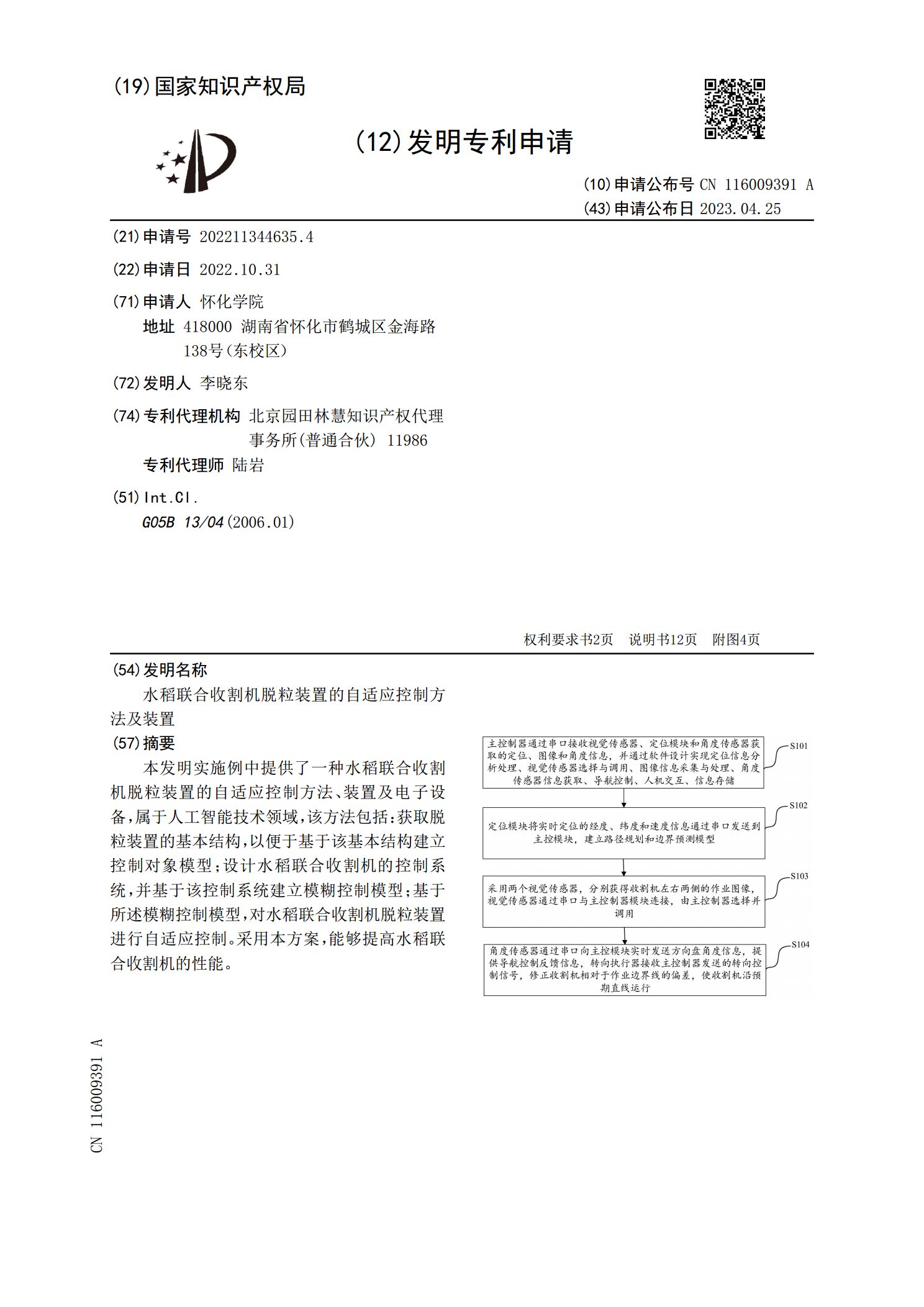
本发明实施例中提供了一种水稻联合收割机脱粒装置的自适应控制方法、装置及电子设备,属于人工智能技术领域,该方法包括:获取脱粒装置的基本结构,以便于基于该基本结构建立控制对象模型;设计水稻联合收割机的控制系统,并基于该控制系统建立模糊控制模型;基于所述模糊控制模型,对水稻联合收割机脱粒装置进行自适应控制。采用本方案,能够提高水稻联合收割机的性能。
一种无人作业谷物联合收割机导航方法与导航装置.pdf
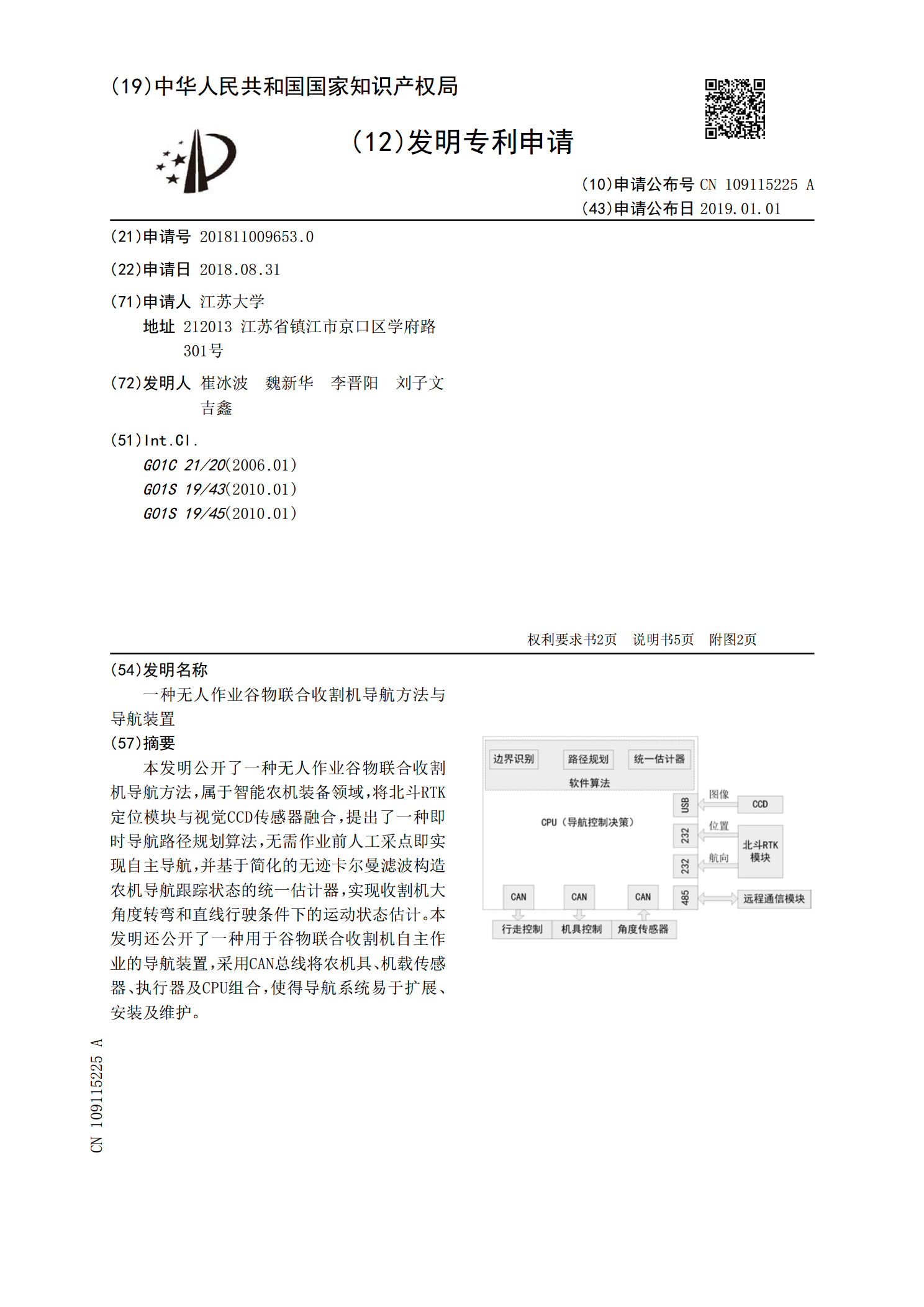
本发明公开了一种无人作业谷物联合收割机导航方法,属于智能农机装备领域,将北斗RTK定位模块与视觉CCD传感器融合,提出了一种即时导航路径规划算法,无需作业前人工采点即实现自主导航,并基于简化的无迹卡尔曼滤波构造农机导航跟踪状态的统一估计器,实现收割机大角度转弯和直线行驶条件下的运动状态估计。本发明还公开了一种用于谷物联合收割机自主作业的导航装置,采用CAN总线将农机具、机载传感器、执行器及CPU组合,使得导航系统易于扩展、安装及维护。
导航方法、装置、存储介质及高级驾驶辅助系统.pdf
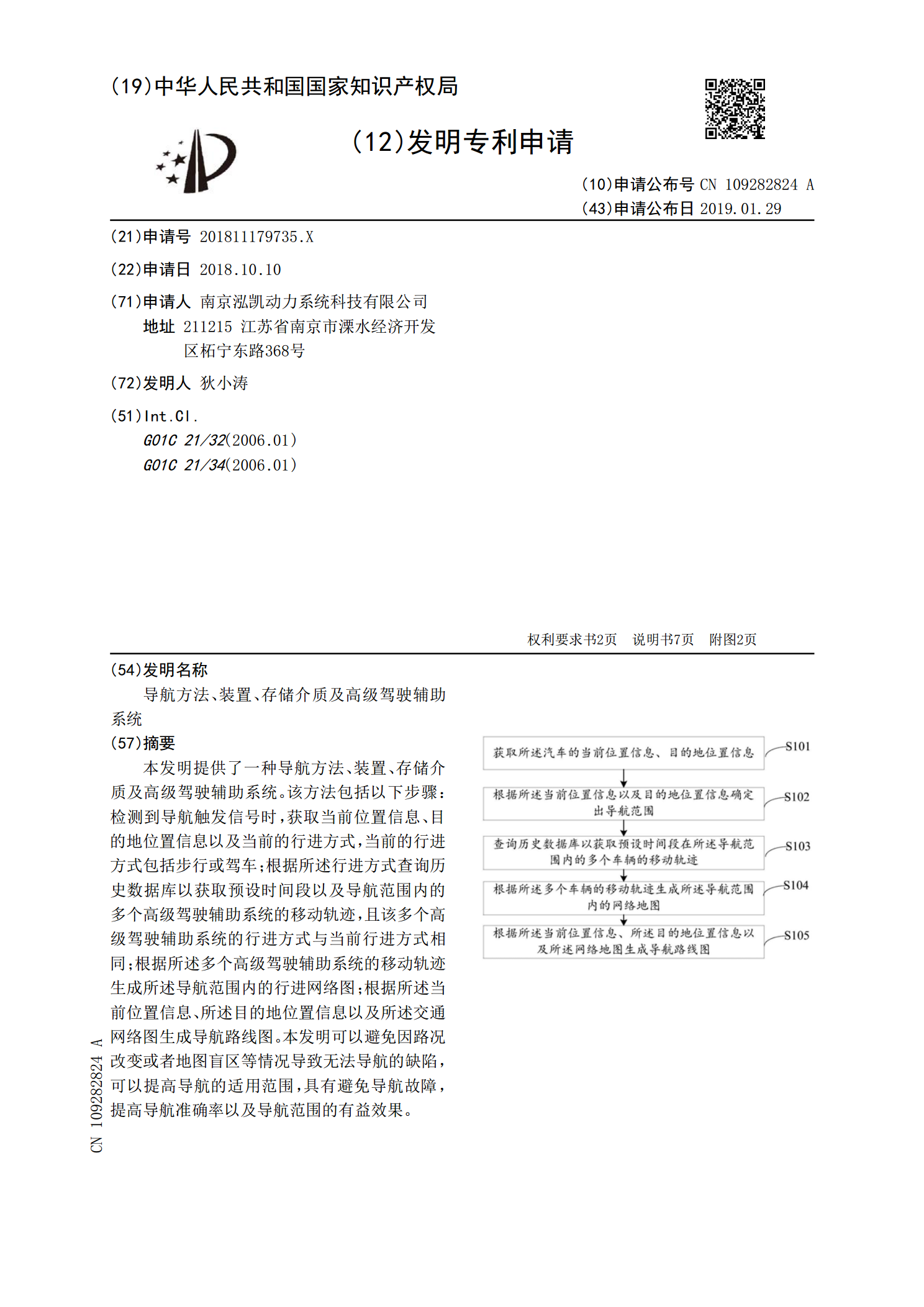
本发明提供了一种导航方法、装置、存储介质及高级驾驶辅助系统。该方法包括以下步骤:检测到导航触发信号时,获取当前位置信息、目的地位置信息以及当前的行进方式,当前的行进方式包括步行或驾车;根据所述行进方式查询历史数据库以获取预设时间段以及导航范围内的多个高级驾驶辅助系统的移动轨迹,且该多个高级驾驶辅助系统的行进方式与当前行进方式相同;根据所述多个高级驾驶辅助系统的移动轨迹生成所述导航范围内的行进网络图;根据所述当前位置信息、所述目的地位置信息以及所述交通网络图生成导航路线图。本发明可以避免因路况改变或者地图盲
一种水稻人工授粉的辅助装置及方法.pdf
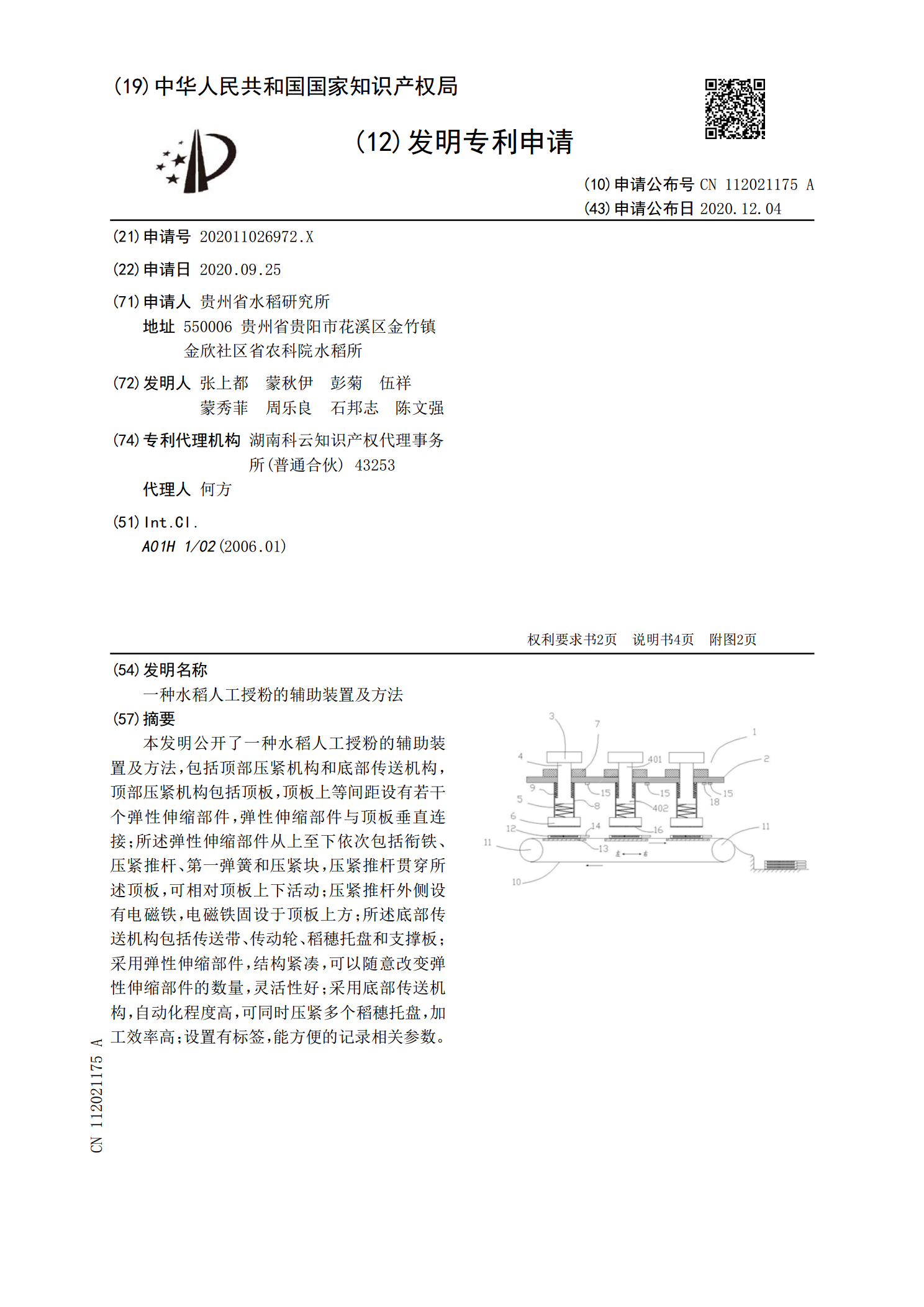
本发明公开了一种水稻人工授粉的辅助装置及方法,包括顶部压紧机构和底部传送机构,顶部压紧机构包括顶板,顶板上等间距设有若干个弹性伸缩部件,弹性伸缩部件与顶板垂直连接;所述弹性伸缩部件从上至下依次包括衔铁、压紧推杆、第一弹簧和压紧块,压紧推杆贯穿所述顶板,可相对顶板上下活动;压紧推杆外侧设有电磁铁,电磁铁固设于顶板上方;所述底部传送机构包括传送带、传动轮、稻穗托盘和支撑板;采用弹性伸缩部件,结构紧凑,可以随意改变弹性伸缩部件的数量,灵活性好;采用底部传送机构,自动化程度高,可同时压紧多个稻穗托盘,加工效率高;