
水稻联合收割机脱粒装置的自适应控制方法及装置.pdf

桂香****盟主

1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
水稻联合收割机脱粒装置的自适应控制方法及装置.pdf
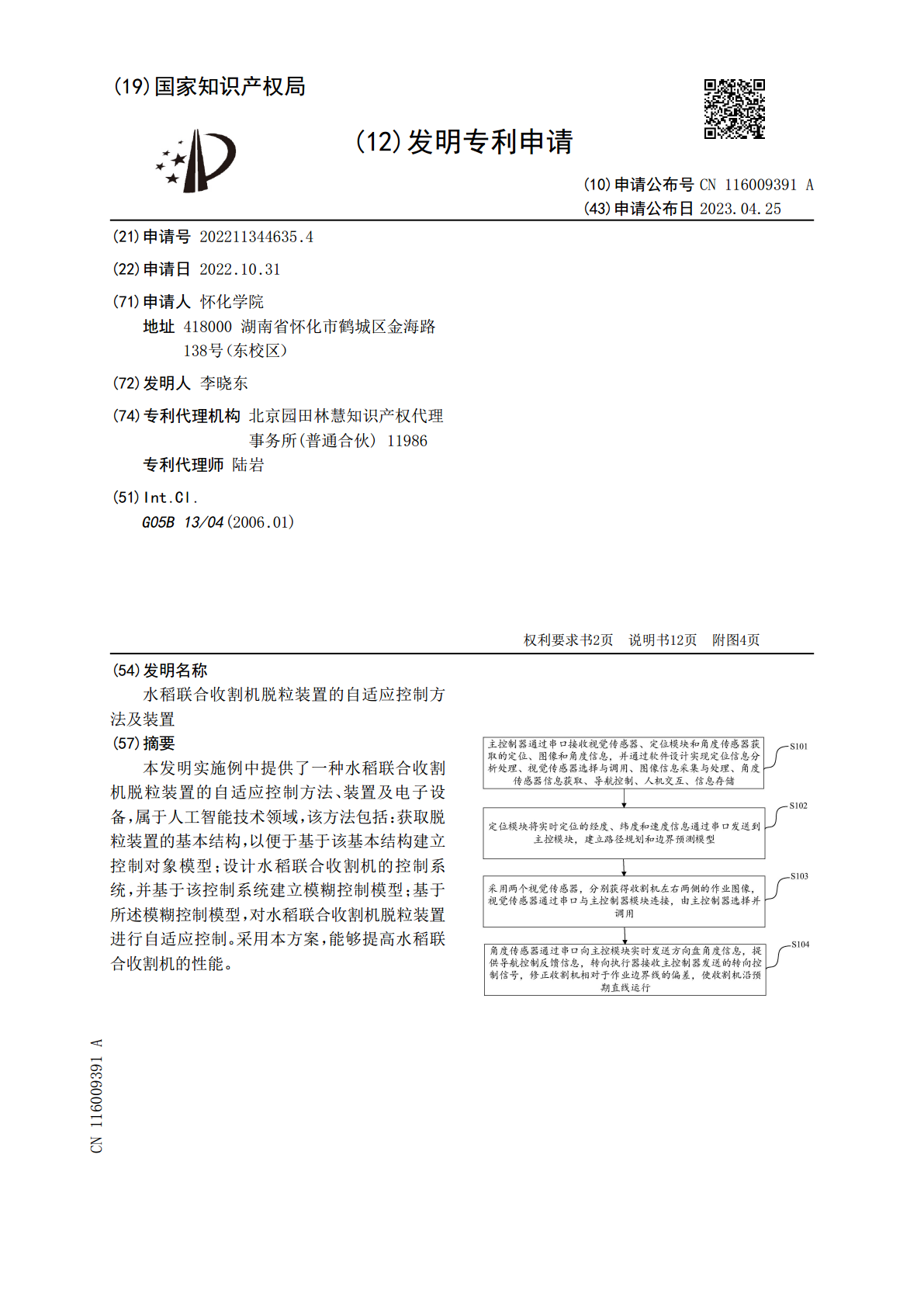
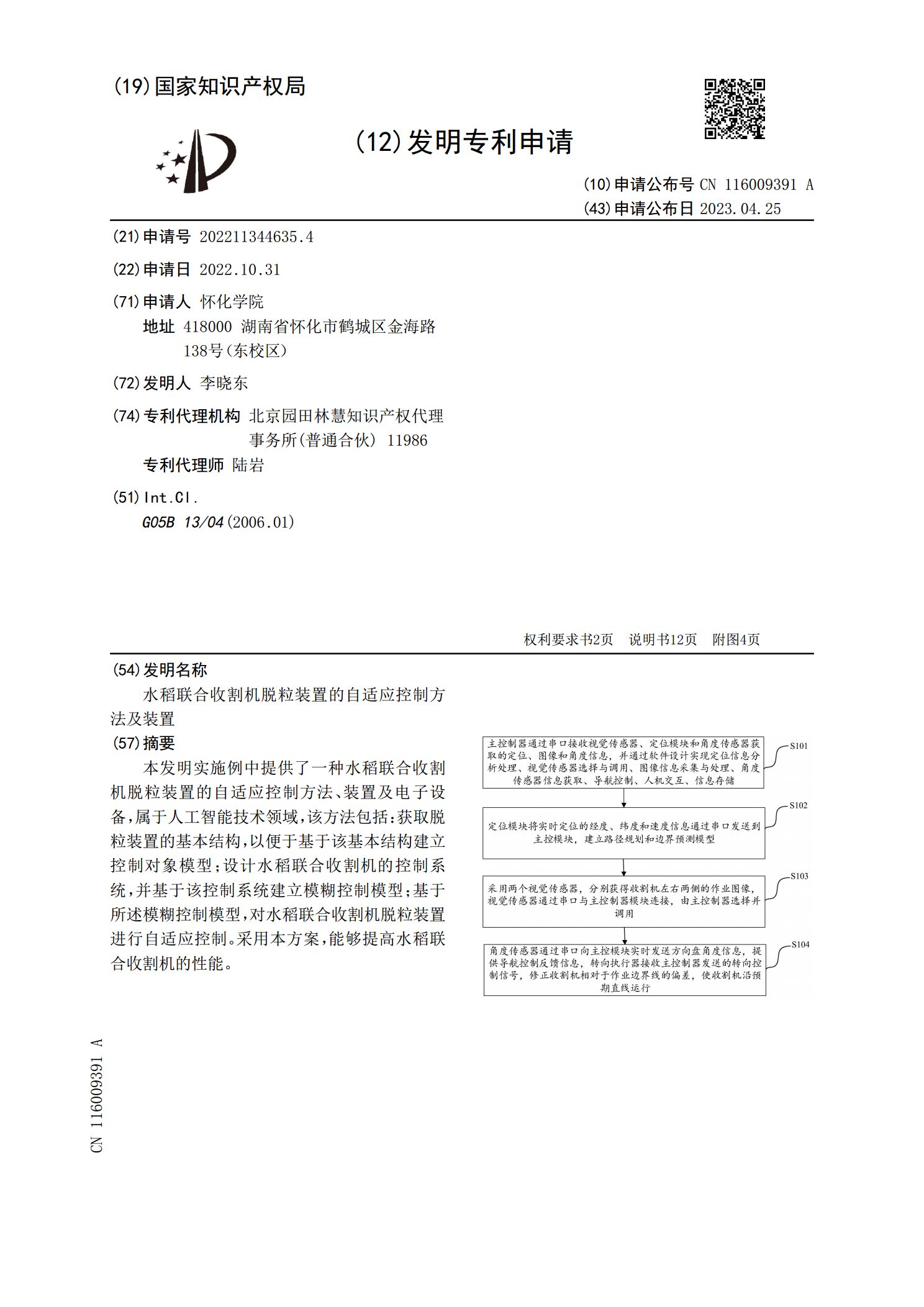
本发明实施例中提供了一种水稻联合收割机脱粒装置的自适应控制方法、装置及电子设备,属于人工智能技术领域,该方法包括:获取脱粒装置的基本结构,以便于基于该基本结构建立控制对象模型;设计水稻联合收割机的控制系统,并基于该控制系统建立模糊控制模型;基于所述模糊控制模型,对水稻联合收割机脱粒装置进行自适应控制。采用本方案,能够提高水稻联合收割机的性能。
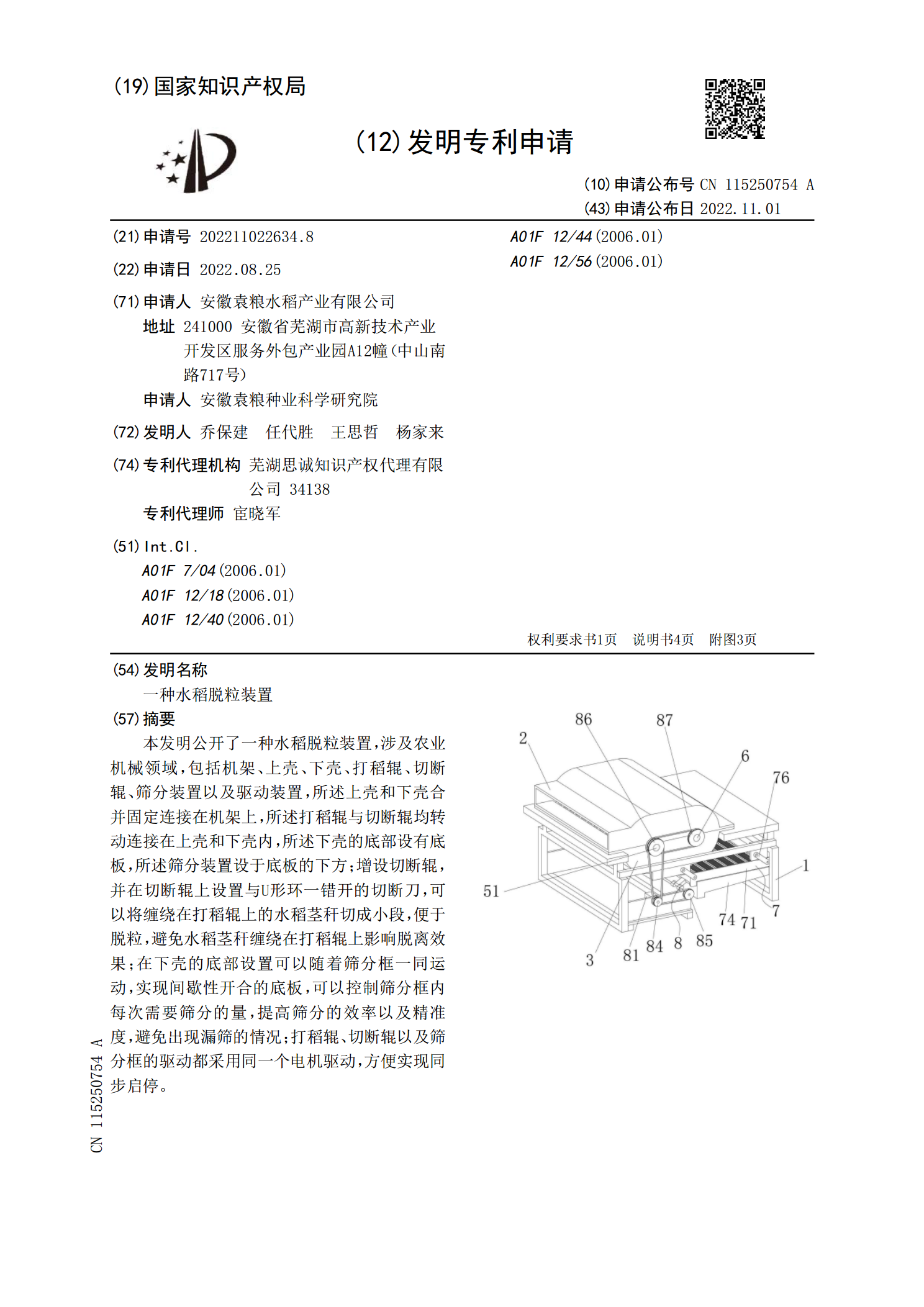
一种水稻脱粒装置.pdf
本发明公开了一种水稻脱粒装置,涉及农业机械领域,包括机架、上壳、下壳、打稻辊、切断辊、筛分装置以及驱动装置,所述上壳和下壳合并固定连接在机架上,所述打稻辊与切断辊均转动连接在上壳和下壳内,所述下壳的底部设有底板,所述筛分装置设于底板的下方;增设切断辊,并在切断辊上设置与U形环一错开的切断刀,可以将缠绕在打稻辊上的水稻茎秆切成小段,便于脱粒,避免水稻茎秆缠绕在打稻辊上影响脱离效果;在下壳的底部设置可以随着筛分框一同运动,实现间歇性开合的底板,可以控制筛分框内每次需要筛分的量,提高筛分的效率以及精准度,避免出
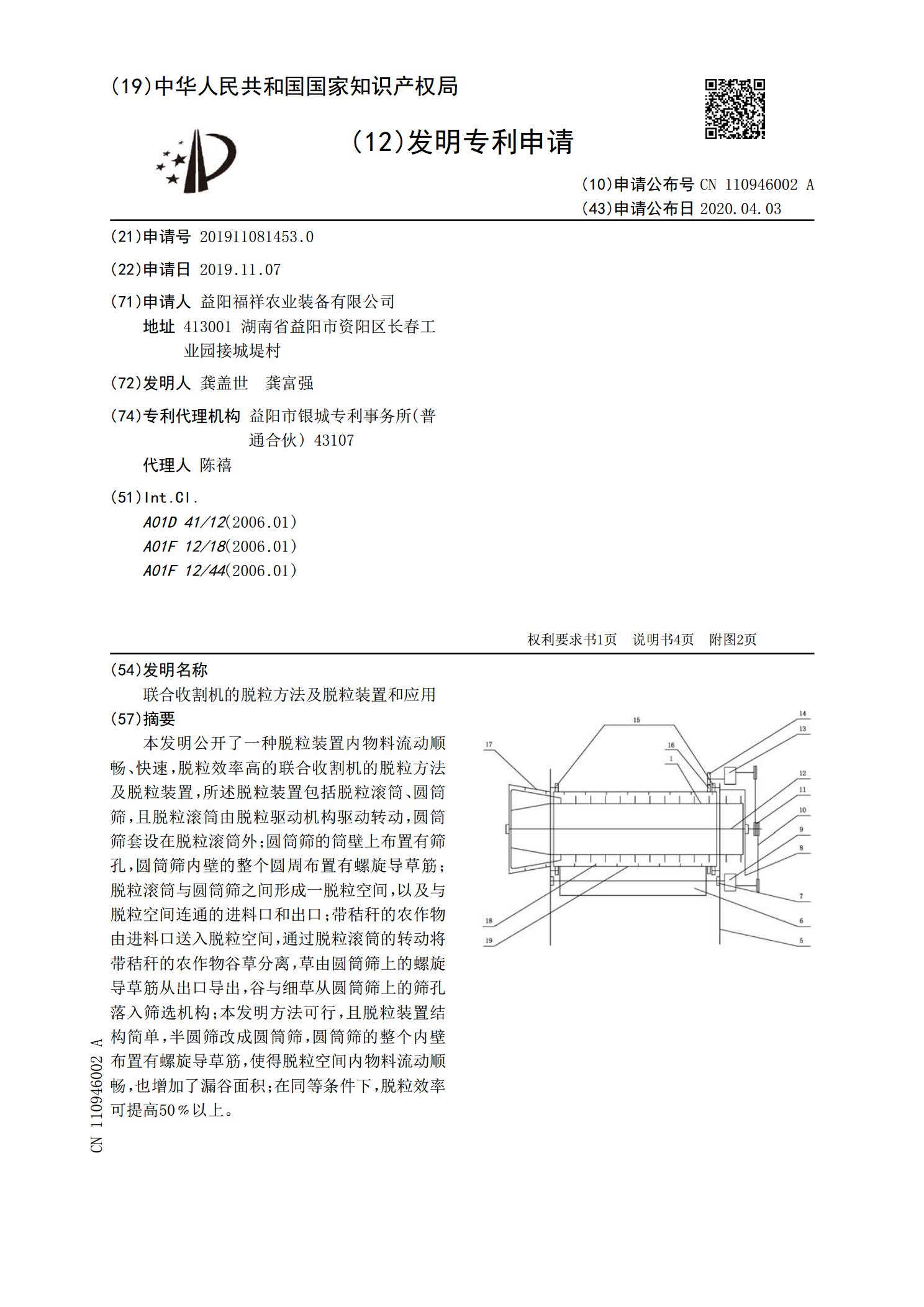
联合收割机的脱粒方法及脱粒装置和应用.pdf
本发明公开了一种脱粒装置内物料流动顺畅、快速,脱粒效率高的联合收割机的脱粒方法及脱粒装置,所述脱粒装置包括脱粒滚筒、圆筒筛,且脱粒滚筒由脱粒驱动机构驱动转动,圆筒筛套设在脱粒滚筒外;圆筒筛的筒壁上布置有筛孔,圆筒筛内壁的整个圆周布置有螺旋导草筋;脱粒滚筒与圆筒筛之间形成一脱粒空间,以及与脱粒空间连通的进料口和出口;带秸秆的农作物由进料口送入脱粒空间,通过脱粒滚筒的转动将带秸秆的农作物谷草分离,草由圆筒筛上的螺旋导草筋从出口导出,谷与细草从圆筒筛上的筛孔落入筛选机构;本发明方法可行,且脱粒装置结构简单,半圆
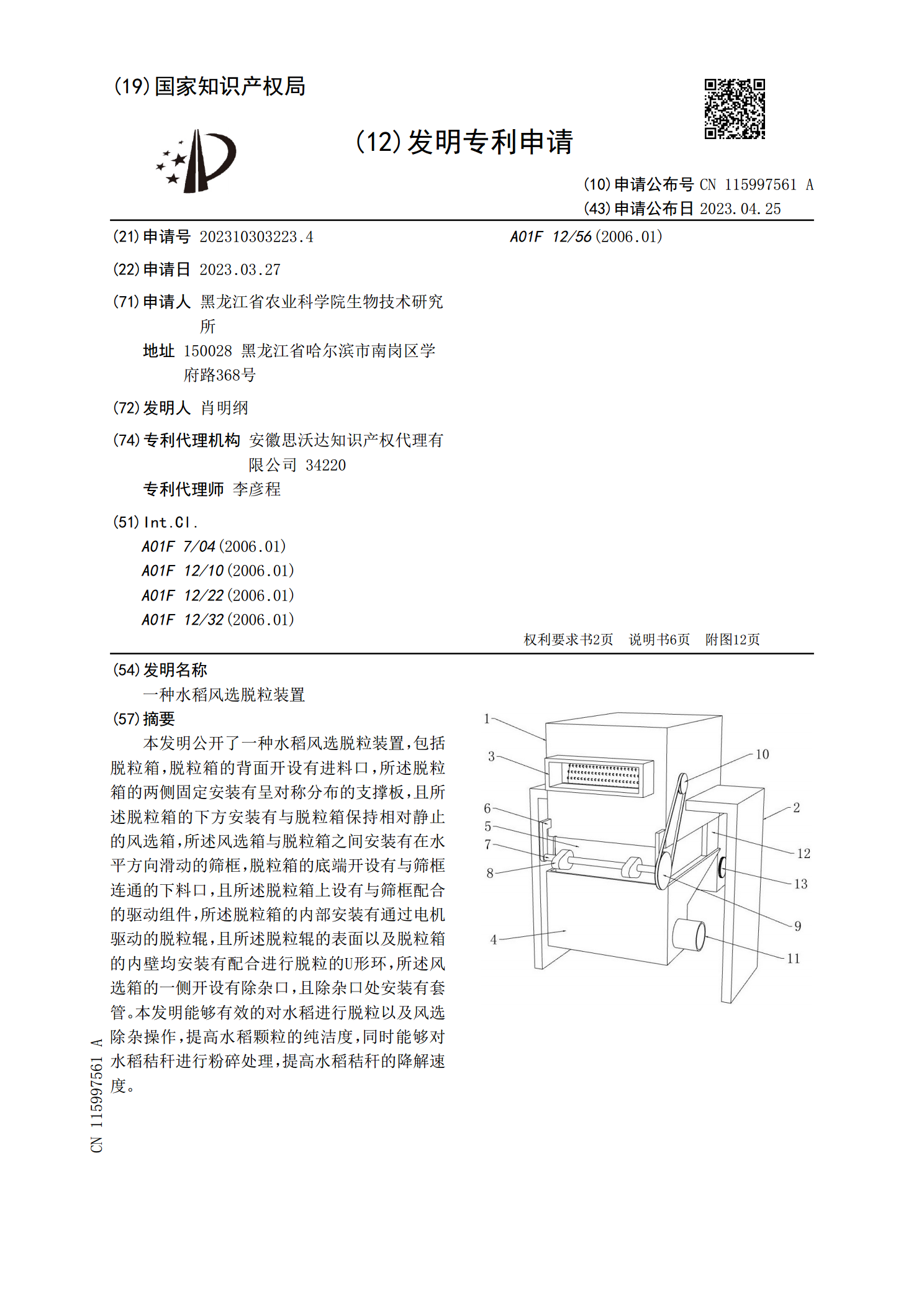
一种水稻风选脱粒装置.pdf
本发明公开了一种水稻风选脱粒装置,包括脱粒箱,脱粒箱的背面开设有进料口,所述脱粒箱的两侧固定安装有呈对称分布的支撑板,且所述脱粒箱的下方安装有与脱粒箱保持相对静止的风选箱,所述风选箱与脱粒箱之间安装有在水平方向滑动的筛框,脱粒箱的底端开设有与筛框连通的下料口,且所述脱粒箱上设有与筛框配合的驱动组件,所述脱粒箱的内部安装有通过电机驱动的脱粒辊,且所述脱粒辊的表面以及脱粒箱的内壁均安装有配合进行脱粒的U形环,所述风选箱的一侧开设有除杂口,且除杂口处安装有套管。本发明能够有效的对水稻进行脱粒以及风选除杂操作,提
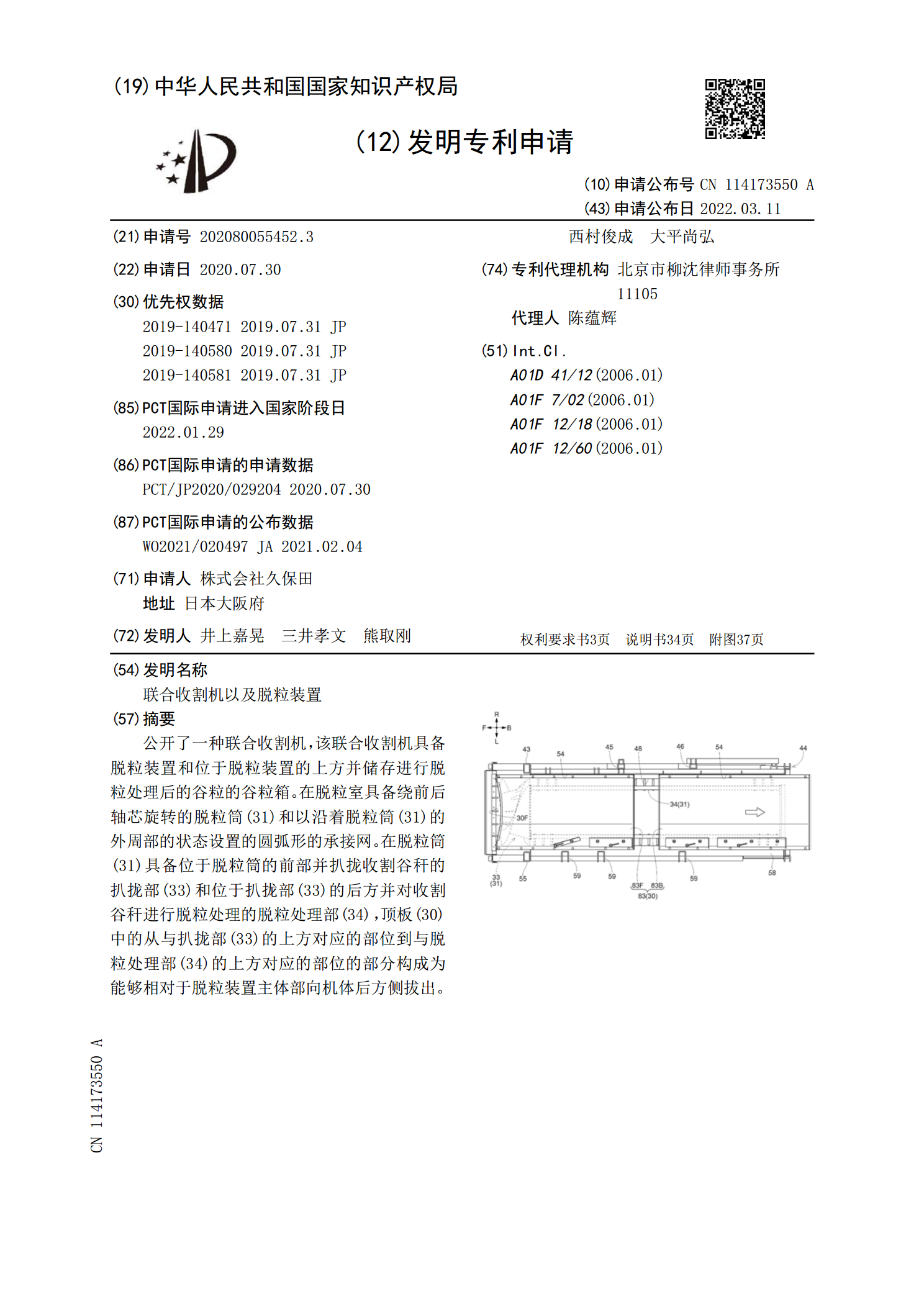
联合收割机以及脱粒装置.pdf
公开了一种联合收割机,该联合收割机具备脱粒装置和位于脱粒装置的上方并储存进行脱粒处理后的谷粒的谷粒箱。在脱粒室具备绕前后轴芯旋转的脱粒筒(31)和以沿着脱粒筒(31)的外周部的状态设置的圆弧形的承接网。在脱粒筒(31)具备位于脱粒筒的前部并扒拢收割谷秆的扒拢部(33)和位于扒拢部(33)的后方并对收割谷秆进行脱粒处理的脱粒处理部(34),顶板(30)中的从与扒拢部(33)的上方对应的部位到与脱粒处理部(34)的上方对应的部位的部分构成为能够相对于脱粒装置主体部向机体后方侧拔出。