
ToF深度相机的标定方法及装置、电子设备.pdf

一只****签网


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

ToF深度相机的标定方法及装置、电子设备.pdf
本申请涉及一种ToF深度相机的标定方法及装置、电子设备。所述方法包括:在初始延时值时,对测量相位进行第一预设次数的时域平均获取相应的平均测量相位;以中心点测量相位为种子点、遍历查找测量相位相同的像素点、并获取目标像素坐标;以预设步长调整延时值,并在每次调整延时值后抓取预设帧的当前测量相位、获取与所述目标像素坐标相同的当前测量相位并进行平均、以作为当前延时值对应的当前中心点测量相位;以及当完成预设周期的延时值调整以及相应中心点测量相位获取后,生成测量相位和真实相位的映射表,完成wiggling标定。本申请通

ToF相机的FPPN标定方法及装置、电子设备.pdf
本发明公开了一种ToF相机的FPPN标定方法及装置、电子设备。所述方法包括如下步骤:获取ToF相机视场中作为标定板的棋盘格的灰度图;将所述灰度图进行亮度二值化,并剔除所述灰度图中棋盘格的黑色部分;获取所述灰度图中棋盘格的白色部分的FPPN值;将所述灰度图按照预定块尺寸划分为多个块,并获取每个块的特征值;以及根据所述灰度图中每个像素点的坐标判定对应像素点所处的块,进而根据所处的块的特征值获取对应像素点的校正值,以完成ToF相机的FPPN标定。本发明所提供的技术方案可以节约标定时间以及标定成本,且避免将光强度

ToF相机标定板的真实距离获取方法及装置、电子设备.pdf
本发明公开了一种ToF相机标定板的真实距离获取方法及装置、电子设备。所述方法包括:获取TOF相机视场中标定板的灰度图的各角点中的顶点,其中,以lens标定所用棋盘格作为所述标定板;以lens标定出的内参矩阵作为初始值,根据所述顶点获取相应的对角线欧式距离;根据所述棋盘格的实际长宽获取相应的对角线真实距离;根据所述对角线欧式距离与所述对角线真实距离的差值,优化所述内参矩阵;以及根据优化后的内参矩阵计算所述灰度图中每个像素点到TOF相机的图像传感器的真实距离。本发明利用lens标定所用棋盘格作为FPPN标定板
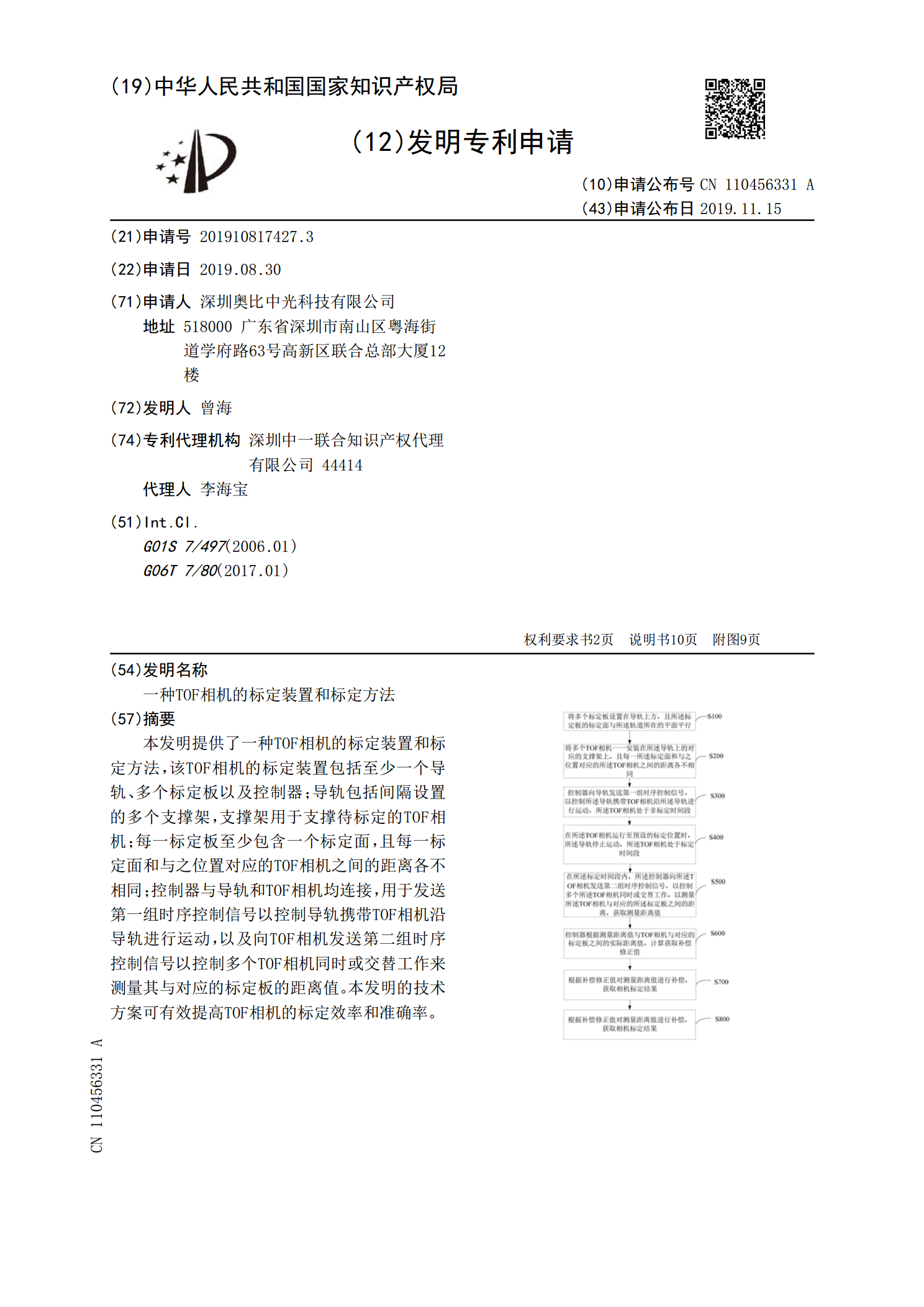
一种TOF相机的标定装置和标定方法.pdf
本发明提供了一种TOF相机的标定装置和标定方法,该TOF相机的标定装置包括至少一个导轨、多个标定板以及控制器;导轨包括间隔设置的多个支撑架,支撑架用于支撑待标定的TOF相机;每一标定板至少包含一个标定面,且每一标定面和与之位置对应的TOF相机之间的距离各不相同;控制器与导轨和TOF相机均连接,用于发送第一组时序控制信号以控制导轨携带TOF相机沿导轨进行运动,以及向TOF相机发送第二组时序控制信号以控制多个TOF相机同时或交替工作来测量其与对应的标定板的距离值。本发明的技术方案可有效提高TOF相机的标定效率
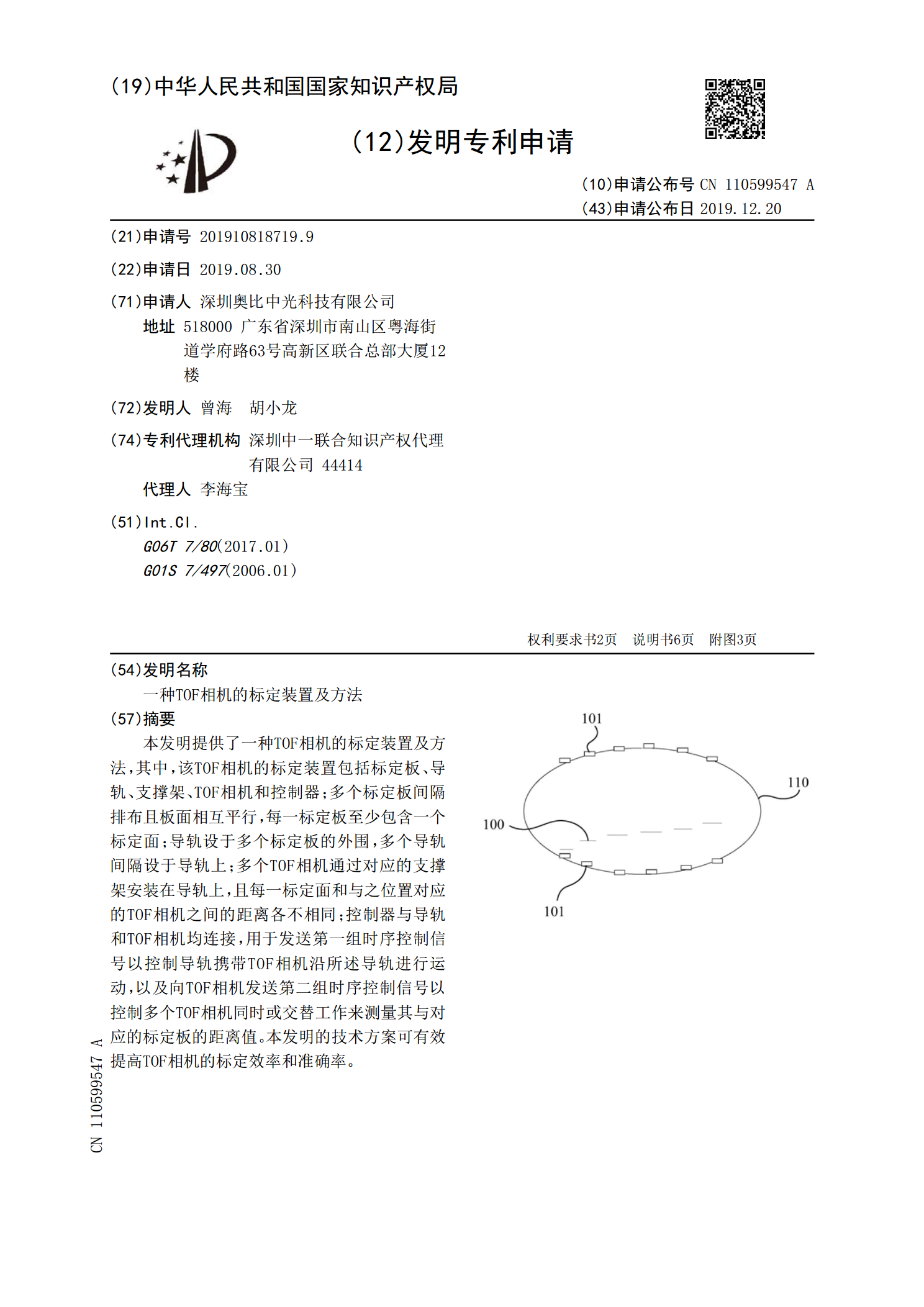
一种TOF相机的标定装置及方法.pdf
本发明提供了一种TOF相机的标定装置及方法,其中,该TOF相机的标定装置包括标定板、导轨、支撑架、TOF相机和控制器;多个标定板间隔排布且板面相互平行,每一标定板至少包含一个标定面;导轨设于多个标定板的外围,多个导轨间隔设于导轨上;多个TOF相机通过对应的支撑架安装在导轨上,且每一标定面和与之位置对应的TOF相机之间的距离各不相同;控制器与导轨和TOF相机均连接,用于发送第一组时序控制信号以控制导轨携带TOF相机沿所述导轨进行运动,以及向TOF相机发送第二组时序控制信号以控制多个TOF相机同时或交替工作来