
无人机输电线路巡检系统及方法.pdf

Ke****67

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

无人机输电线路巡检系统及方法.pdf
本申请公开了一种无人机输电线路巡检系统及方法,通过激光跟踪仪在无人机飞行过程中跟踪反射球,并以反射球为坐标原点建立坐标系,得到无人机在飞行过程中的坐标数据,以实现无人机的初始定位;再通过激光点阵发射器实时计算无人机与输电线路之间的相对位置数据,以及通过飞行控制模块在坐标数据满足预设坐标条件时,基于相对位置数据,对无人机进行飞行控制,以利用输电线路为位置参考对象,使得无人机在与输电线路保持相对位置的情况下沿线飞行,从而使得无人机在受到电磁干扰而脱离定位模块的情况下也能够精准定位,有效防止电磁场干扰导致定位不
无人机架空输电线路巡检方法及系统.pdf
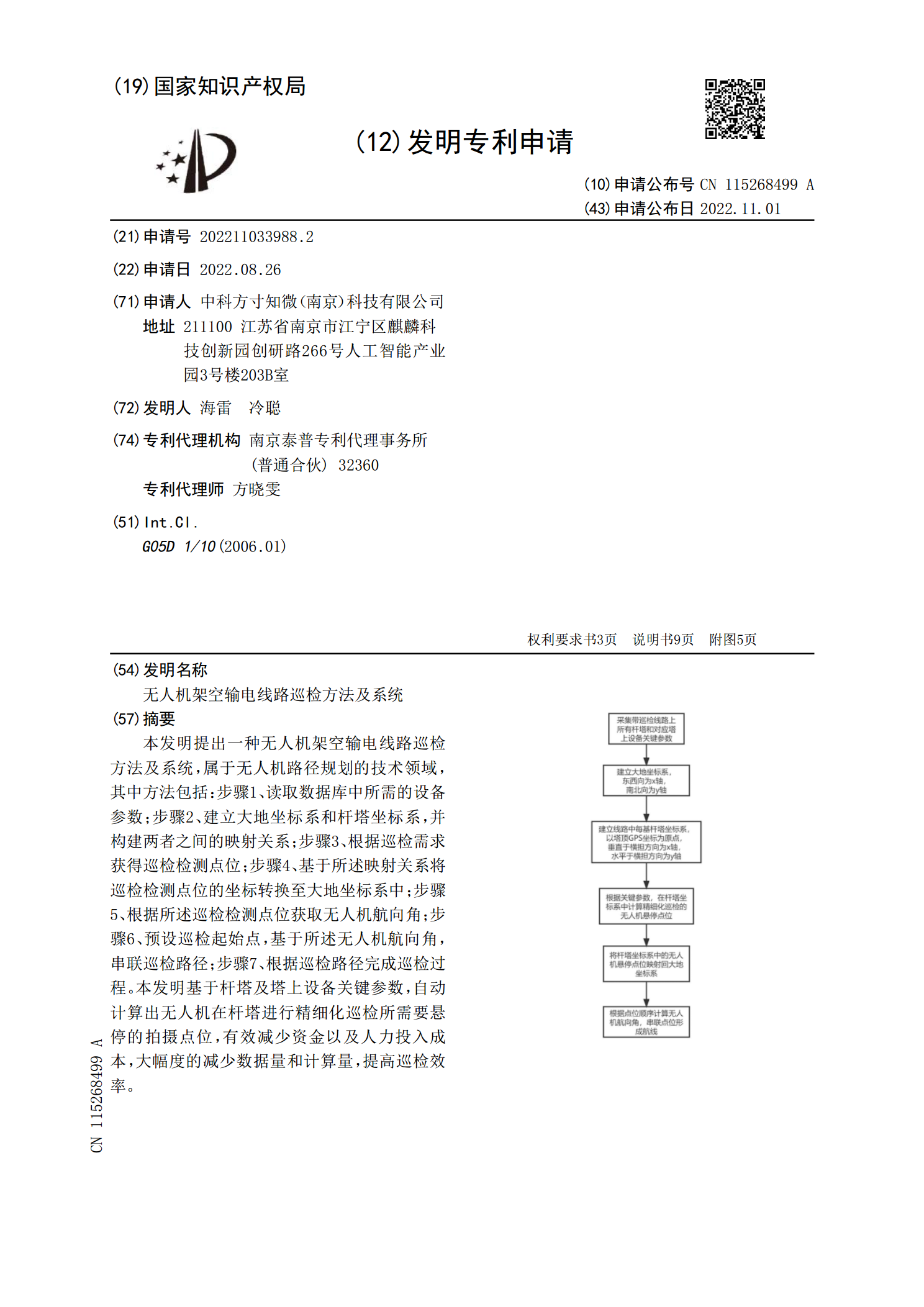
本发明提出一种无人机架空输电线路巡检方法及系统,属于无人机路径规划的技术领域,其中方法包括:步骤1、读取数据库中所需的设备参数;步骤2、建立大地坐标系和杆塔坐标系,并构建两者之间的映射关系;步骤3、根据巡检需求获得巡检检测点位;步骤4、基于所述映射关系将巡检检测点位的坐标转换至大地坐标系中;步骤5、根据所述巡检检测点位获取无人机航向角;步骤6、预设巡检起始点,基于所述无人机航向角,串联巡检路径;步骤7、根据巡检路径完成巡检过程。本发明基于杆塔及塔上设备关键参数,自动计算出无人机在杆塔进行精细化巡检所需要悬
无人机架空输电线路巡检方法及系统.pdf
本发明提出一种无人机架空输电线路巡检方法及系统,属于无人机路径规划的技术领域,其中方法包括:步骤1、读取数据库中所需的设备参数;步骤2、建立大地坐标系和杆塔坐标系,并构建两者之间的映射关系;步骤3、根据巡检需求获得巡检检测点位;步骤4、基于所述映射关系将巡检检测点位的坐标转换至大地坐标系中;步骤5、根据所述巡检检测点位获取无人机航向角;步骤6、预设巡检起始点,基于所述无人机航向角,串联巡检路径;步骤7、根据巡检路径完成巡检过程。本发明基于杆塔及塔上设备关键参数,自动计算出无人机在杆塔进行精细化巡检所需要悬
输电线路多旋翼无人机精细智能巡检系统及其方法.pdf
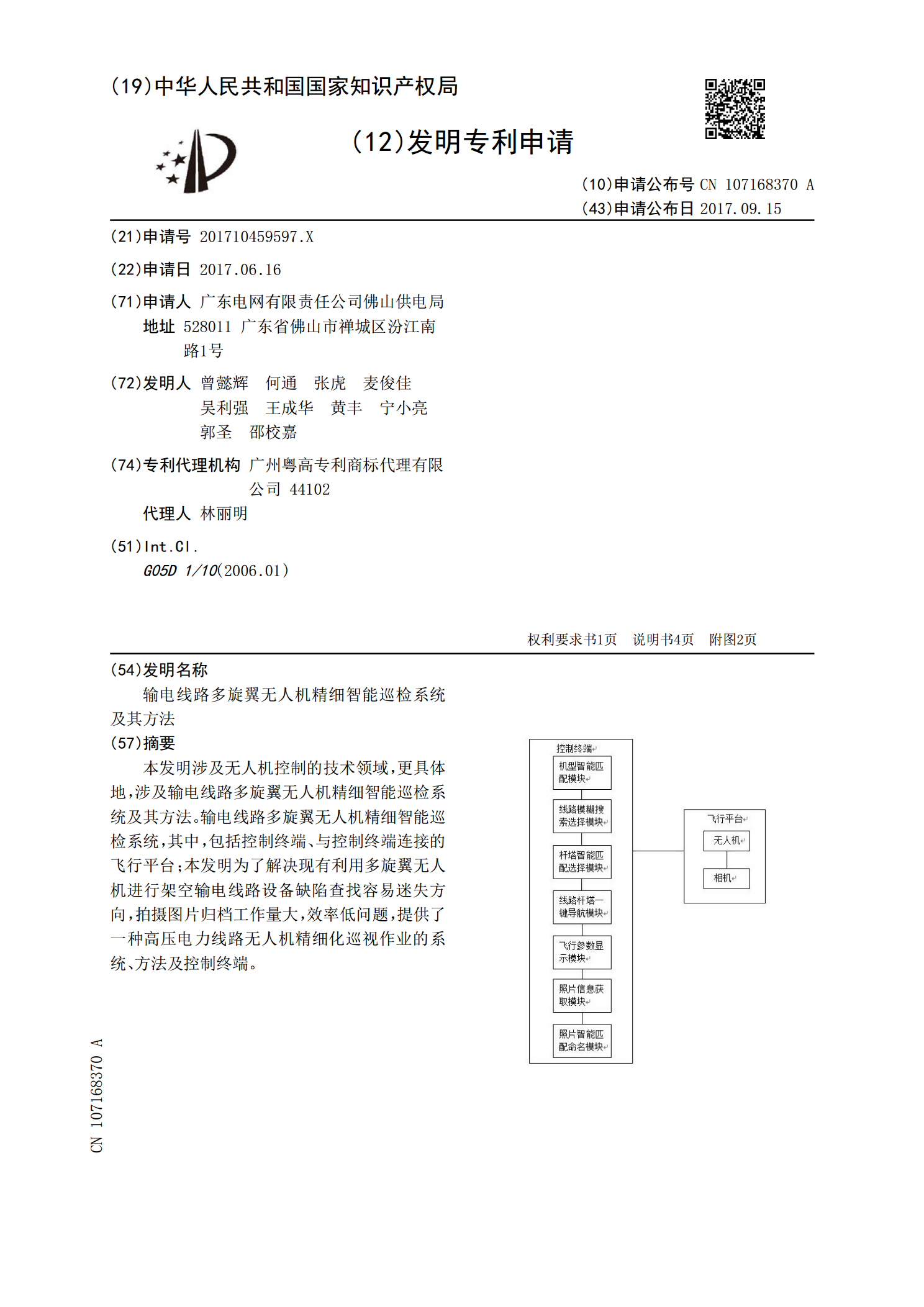
本发明涉及无人机控制的技术领域,更具体地,涉及输电线路多旋翼无人机精细智能巡检系统及其方法。输电线路多旋翼无人机精细智能巡检系统,其中,包括控制终端、与控制终端连接的飞行平台;本发明为了解决现有利用多旋翼无人机进行架空输电线路设备缺陷查找容易迷失方向,拍摄图片归档工作量大,效率低问题,提供了一种高压电力线路无人机精细化巡视作业的系统、方法及控制终端。
一种输电线路的无人机巡检方法、装置、存储介质及系统.pdf
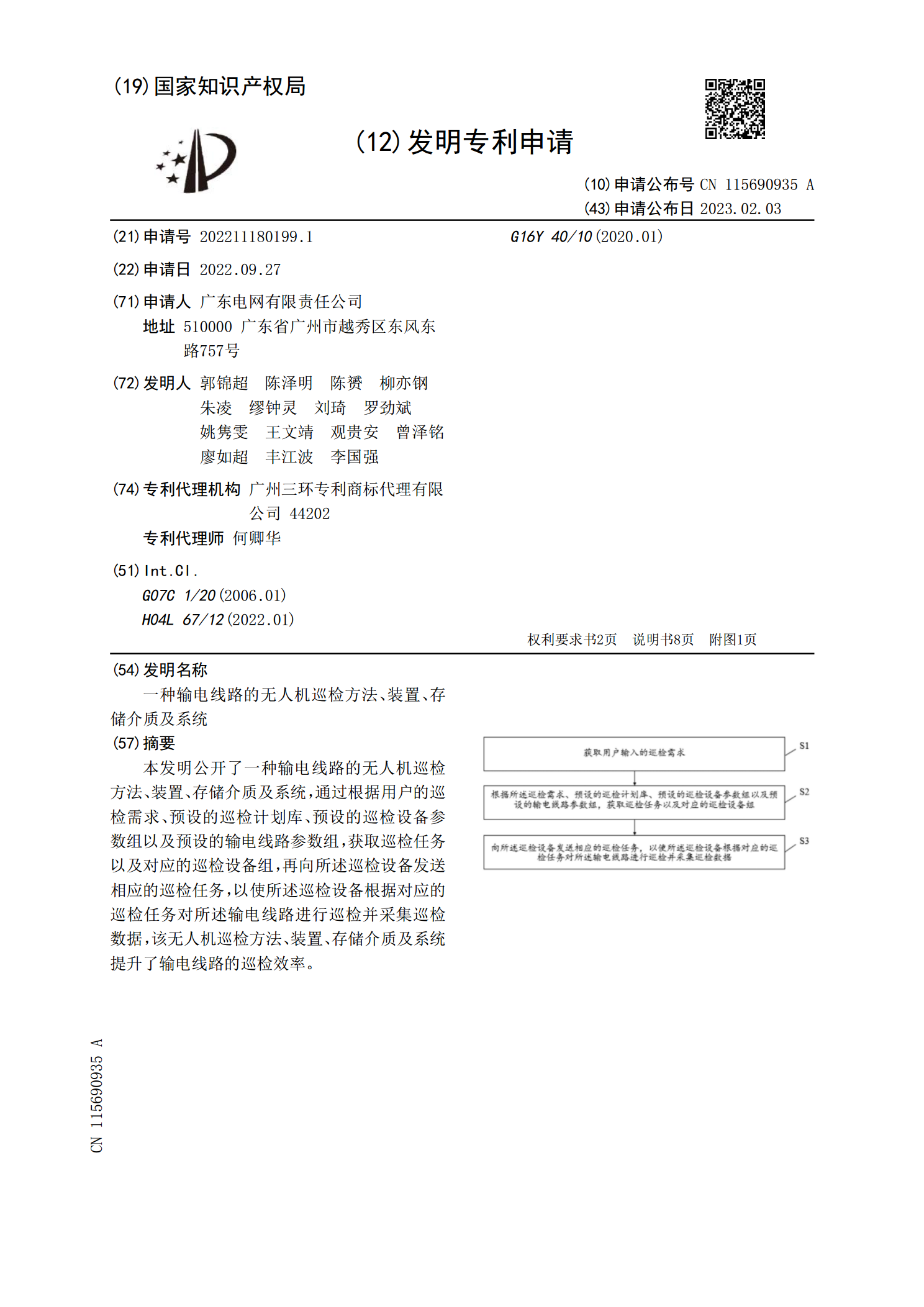
本发明公开了一种输电线路的无人机巡检方法、装置、存储介质及系统,通过根据用户的巡检需求、预设的巡检计划库、预设的巡检设备参数组以及预设的输电线路参数组,获取巡检任务以及对应的巡检设备组,再向所述巡检设备发送相应的巡检任务,以使所述巡检设备根据对应的巡检任务对所述输电线路进行巡检并采集巡检数据,该无人机巡检方法、装置、存储介质及系统提升了输电线路的巡检效率。