
柔性机械臂逆动力学问题的分析和求解.docx

书生****aa


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

柔性机械臂逆动力学问题的分析和求解.docx
柔性机械臂逆动力学问题的分析和求解摘要:采用割线坐标系对机械臂的运动进行了描述,并分快变和慢变两方面进行逆动力学问题的分析与求解。在对快变部分逆动力学性质的分析中发现,快变部分精确的逆动力学解是发散的。在进行柔性机械臂逆动力学求解时,应在慢变的意义上进行。文中给出了一种去掉系统快变部分的简单方法,并进行了逆动力学求解。数值仿真结果表明,该处理方法是合理的。关键词:柔性机械臂;动力学;逆动力学;振动;大范围运动theAnalysisandSolutionforInverseDynamicProblemsof

空间型柔性机械臂的动力学分析的综述报告.docx
空间型柔性机械臂的动力学分析的综述报告空间型柔性机械臂是指由柔性材料(如橡胶、聚合物、杆状材料等)制成的机械臂。相比于硬性机械臂,柔性机械臂具有更强的适应性和灵活性,能够在复杂环境中完成更多样化的任务。然而,由于其柔性和非线性特性,柔性机械臂的动力学建模和控制变得更加复杂。动力学分析是柔性机械臂设计和控制的基础,它涉及到运动学、动力学和控制等多个方面,因此对于柔性机械臂的动力学分析的研究已经成为了机器人学领域的热点问题之一。本文将从以下三个方面综述空间型柔性机械臂的动力学分析。1.运动学分析运动学分析是指
基于神经网络和构型编码的机械臂逆运动学求解方法.pdf
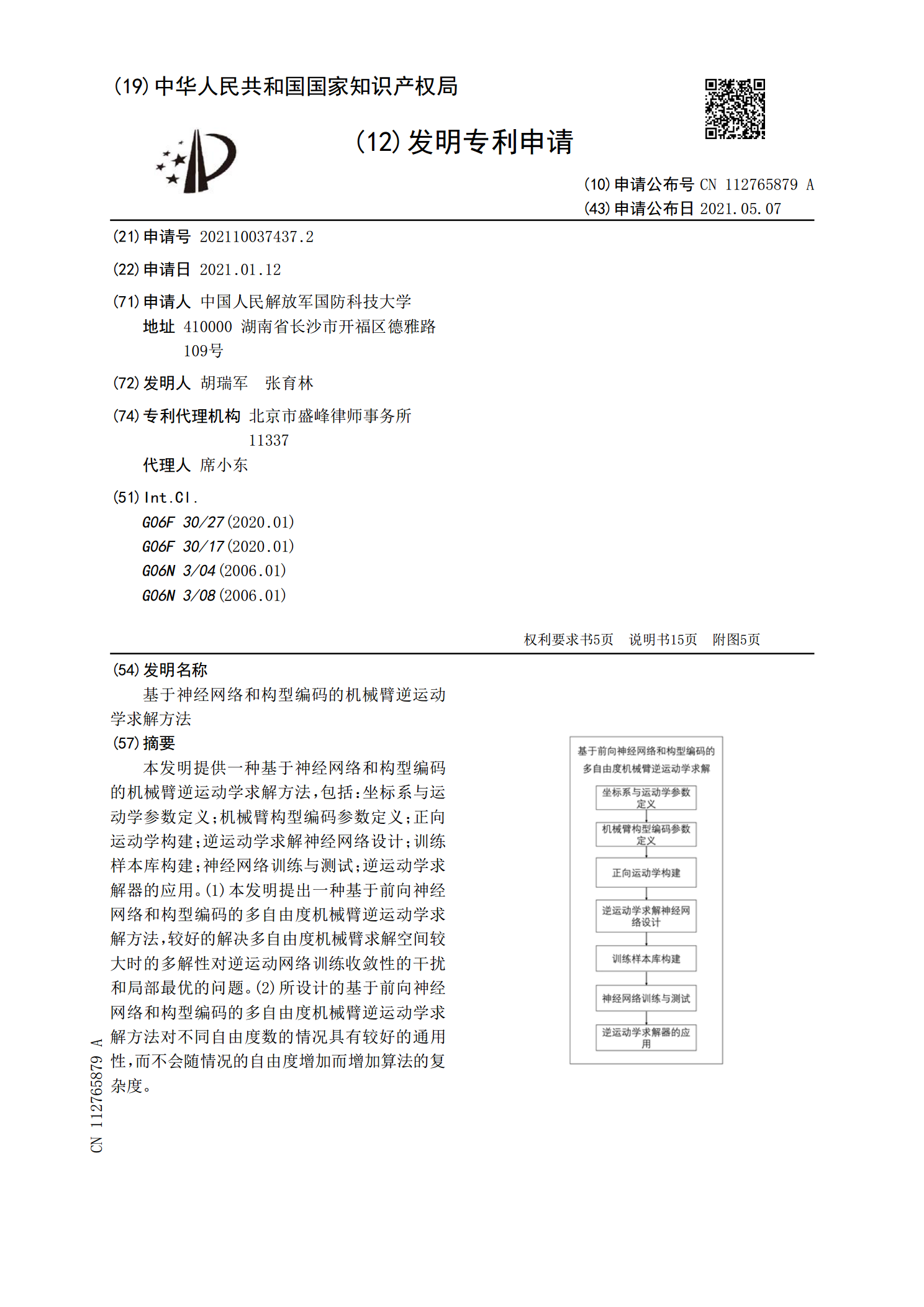
本发明提供一种基于神经网络和构型编码的机械臂逆运动学求解方法,包括:坐标系与运动学参数定义;机械臂构型编码参数定义;正向运动学构建;逆运动学求解神经网络设计;训练样本库构建;神经网络训练与测试;逆运动学求解器的应用。(1)本发明提出一种基于前向神经网络和构型编码的多自由度机械臂逆运动学求解方法,较好的解决多自由度机械臂求解空间较大时的多解性对逆运动网络训练收敛性的干扰和局部最优的问题。(2)所设计的基于前向神经网络和构型编码的多自由度机械臂逆运动学求解方法对不同自由度数的情况具有较好的通用性,而不会随情况

空间柔性机械臂的动力学特性与主动控制研究的开题报告.docx
空间柔性机械臂的动力学特性与主动控制研究的开题报告一、选题背景随着工业自动化水平的不断提高,柔性机械臂的应用越来越广泛。与传统的机械臂相比,柔性机械臂具有结构轻巧、精度高、运动速度快、运动轨迹灵活等特点。而空间柔性机械臂又比普通柔性机械臂更为复杂,其动力学特性和控制问题更加突出。因此,研究空间柔性机械臂的动力学特性与主动控制问题具有重要的理论意义和实际应用价值。二、选题目的和意义本研究旨在深入探究空间柔性机械臂的动力学特性和主动控制问题,为提高柔性机械臂的控制精度和控制效率,为柔性机械臂的应用提供科学依据

一种七轴工业机械臂的逆动学求解方法.pdf
本发明实施例提供了一种七轴工业机械臂的逆动学求解方法,根据每两个离散点得到第一关节角的变化趋势得到离散点集合中每一点对应的第一关节角的值;采用每个离散点的末端位姿矩阵,获取第五或第六姿态的坐标原点,再求出第三姿态的坐标原点,求出第二关节角;根据第四关节角、第四关节角的第一特征角以及第四关节角的第二特征角之间的条件关系求解第四关节角;由关于第一关节角、第二关节角、第四关节角的方程以及第三关节角的两个等式,求出第三关节角;获取第四姿态的坐标原点坐标,求出第六关节角的特征角,根据第六关节角的特征角求解第六关节角