
空间型柔性机械臂的动力学分析的综述报告.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

空间型柔性机械臂的动力学分析的综述报告.docx
空间型柔性机械臂的动力学分析的综述报告空间型柔性机械臂是指由柔性材料(如橡胶、聚合物、杆状材料等)制成的机械臂。相比于硬性机械臂,柔性机械臂具有更强的适应性和灵活性,能够在复杂环境中完成更多样化的任务。然而,由于其柔性和非线性特性,柔性机械臂的动力学建模和控制变得更加复杂。动力学分析是柔性机械臂设计和控制的基础,它涉及到运动学、动力学和控制等多个方面,因此对于柔性机械臂的动力学分析的研究已经成为了机器人学领域的热点问题之一。本文将从以下三个方面综述空间型柔性机械臂的动力学分析。1.运动学分析运动学分析是指

空间柔性机械臂的动力学特性与主动控制研究的开题报告.docx
空间柔性机械臂的动力学特性与主动控制研究的开题报告一、选题背景随着工业自动化水平的不断提高,柔性机械臂的应用越来越广泛。与传统的机械臂相比,柔性机械臂具有结构轻巧、精度高、运动速度快、运动轨迹灵活等特点。而空间柔性机械臂又比普通柔性机械臂更为复杂,其动力学特性和控制问题更加突出。因此,研究空间柔性机械臂的动力学特性与主动控制问题具有重要的理论意义和实际应用价值。二、选题目的和意义本研究旨在深入探究空间柔性机械臂的动力学特性和主动控制问题,为提高柔性机械臂的控制精度和控制效率,为柔性机械臂的应用提供科学依据

柔性机械臂的智能控制方法研究的综述报告.docx
柔性机械臂的智能控制方法研究的综述报告随着工业智能化的发展和机器人技术的不断革新,柔性机械臂作为机器人的一种,得到了越来越广泛的关注和应用。相比传统机械臂,柔性机械臂具有更好的自适应性、敏捷性和柔性度,可以更好地适应复杂的工作环境和任务需求。而智能控制方法是提高柔性机械臂性能和应用效果的关键技术之一。本综述将从以下几个方面,介绍当前柔性机械臂智能控制方法的研究现状和进展。一、传统控制方法的缺陷和挑战传统的PID控制、模糊控制、神经网络控制等方法存在的问题在柔性机械臂的控制上更加显著。例如,由于柔性机械臂的
一种空间柔性机械臂.pdf
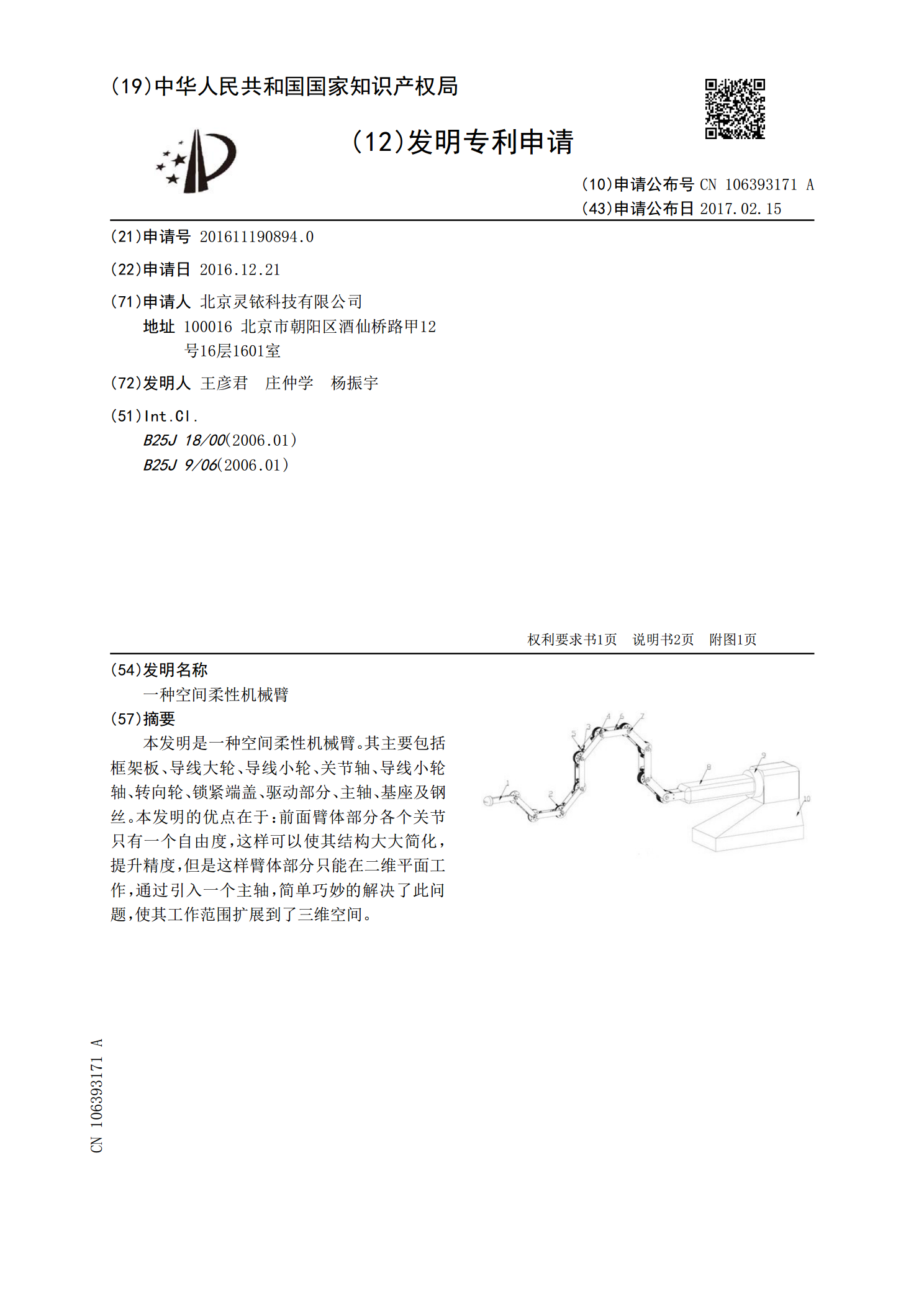
本发明是一种空间柔性机械臂。其主要包括框架板、导线大轮、导线小轮、关节轴、导线小轮轴、转向轮、锁紧端盖、驱动部分、主轴、基座及钢丝。本发明的优点在于:前面臂体部分各个关节只有一个自由度,这样可以使其结构大大简化,提升精度,但是这样臂体部分只能在二维平面工作,通过引入一个主轴,简单巧妙的解决了此问题,使其工作范围扩展到了三维空间。

柔性机械臂逆动力学问题的分析和求解.docx
柔性机械臂逆动力学问题的分析和求解摘要:采用割线坐标系对机械臂的运动进行了描述,并分快变和慢变两方面进行逆动力学问题的分析与求解。在对快变部分逆动力学性质的分析中发现,快变部分精确的逆动力学解是发散的。在进行柔性机械臂逆动力学求解时,应在慢变的意义上进行。文中给出了一种去掉系统快变部分的简单方法,并进行了逆动力学求解。数值仿真结果表明,该处理方法是合理的。关键词:柔性机械臂;动力学;逆动力学;振动;大范围运动theAnalysisandSolutionforInverseDynamicProblemsof