
西门子200smart控制台达B2系列伺服电机案例.pdf

文库****品店


1/10
2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

西门子200smart控制台达B2系列伺服电机案例.pdf
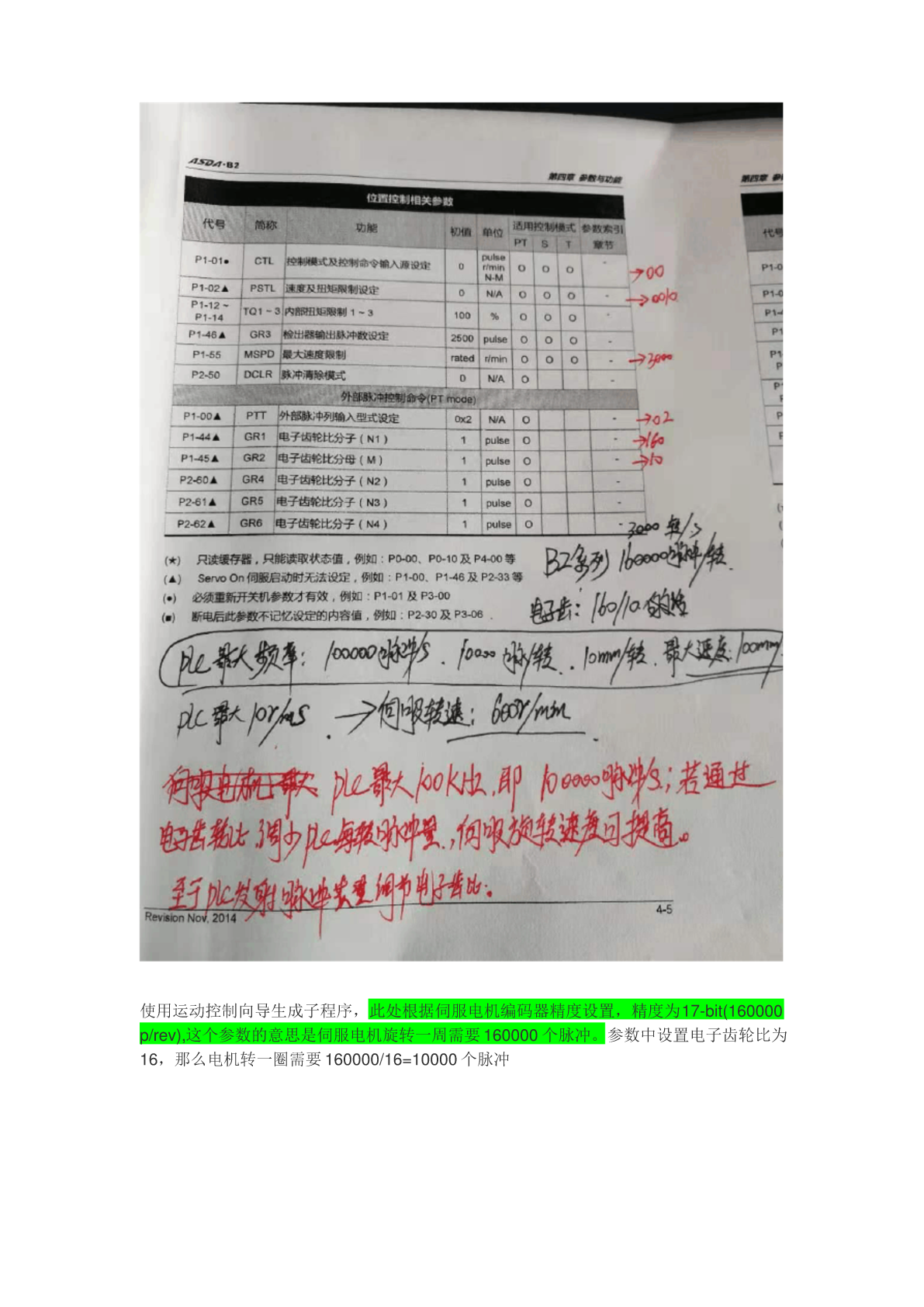
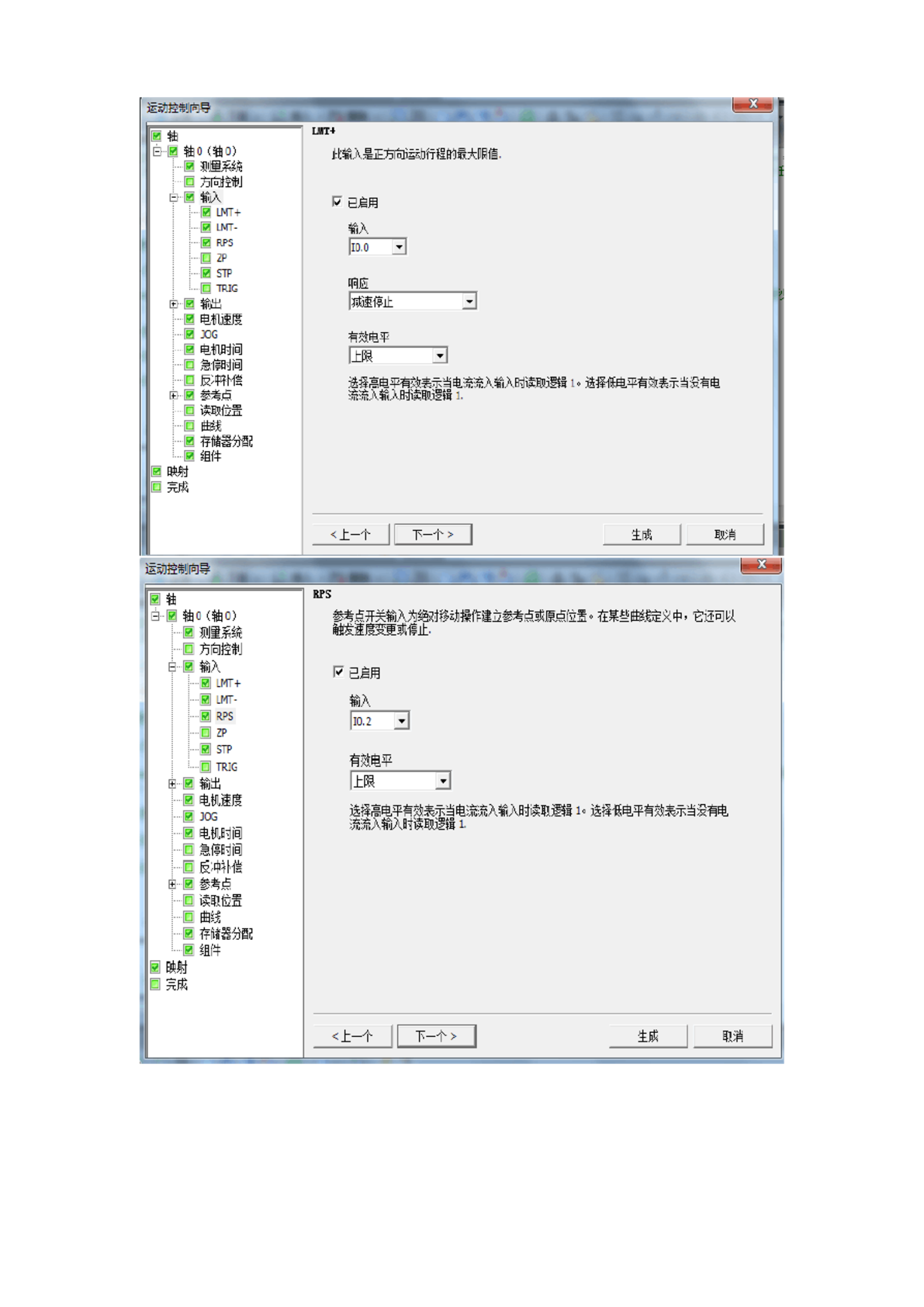
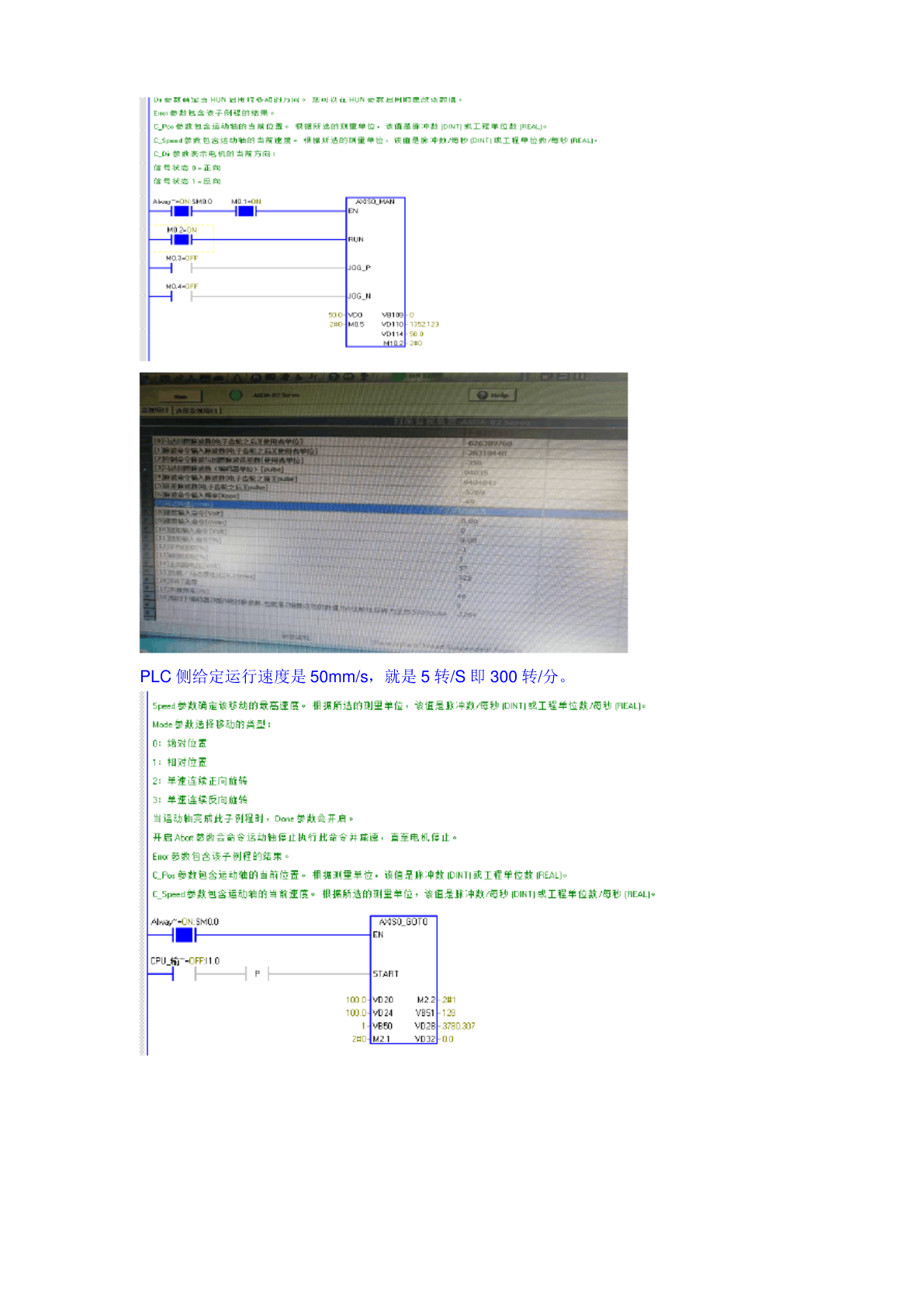
西门子200smart控制台达B2系列伺服电机案例接线图如下:伺服参数设置,其他功能简略使用运动控制向导生成子程序,此处根据伺服电机编码器精度设置,精度为17-bit(160000p/rev),这个参数的意思是伺服电机旋转一周需要160000个脉冲。参数中设置电子齿轮比为16,那么电机转一圈需要160000/16=10000个脉冲此处的应用的最大电机速度与设定的每转需要的脉冲数有关。由于西门子200smartCPU的输出脉冲是100KHZ(也就是每秒输出100000个脉冲),由于前边设置了电机旋转一周行程

台达DVP28SV11PLC控制台达B2伺服接线及程序说明.doc
伺服位置控制说明1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度.2、相关设备型号序号名称型号1PLCDVP28SV11S22伺服控制器ASD—B2—0121—B3伺服电机ECMA-C20401ES4伺服电机与控制器接连线请咨询台达3、台达PLC接线S/S接24VX1接常开再接0VX2接常开再接0VUP0接24VZP0接0VY0接43,输入脉冲指令(位置指令脉冲+)Y3接39,控制方向(位置指令符号+)4、伺服控制器接线14接0V11跟17
西门子伺服电机维修.pdf
关于西门子伺服电机内置编码器的正确安装方法一、工作内容1、这项技术适用于对德国西门子伺服电机(型号为1FT603-1FT613,1FK604-1FK610)内置编码器损坏后的安装、调试,配置的增量型编码器为德国海德汉公司的ERN1387.001/020,绝对值编码器为海德汉公司EQN1325.001。2、使用工具公制内六方扳手一套,自制专用工具一个,十字改锥及一字改锥各一把,梅花改锥6件套。3、可解决的问题对有故障的西门子伺服电机进行修理或更换损坏的伺服电机内置编码器,做到修旧利废,节约维修费用。二、操作

西门子伺服电机维修.doc
关于西门子伺服电机内置编码器的正确安装方法一、工作内容1、这项技术适用于对德国西门子伺服电机(型号为1FT603-1FT613,1FK604-1FK610)内置编码器损坏后的安装、调试,配置的增量型编码器为德国海德汉公司的ERN1387.001/020,绝对值编码器为海德汉公司EQN1325.001。2、使用工具公制内六方扳手一套,自制专用工具一个,十字改锥及一字改锥各一把,梅花改锥6件套。3、可解决的问题对有故障的西门子伺服电机进行修理或更换损坏的伺服电机内置编码器,做到修旧利废,节约维修费用。二、操作
西门子伺服电机_蜗轮蜗杆减速机 西门子伺服电机选型手册.pdf
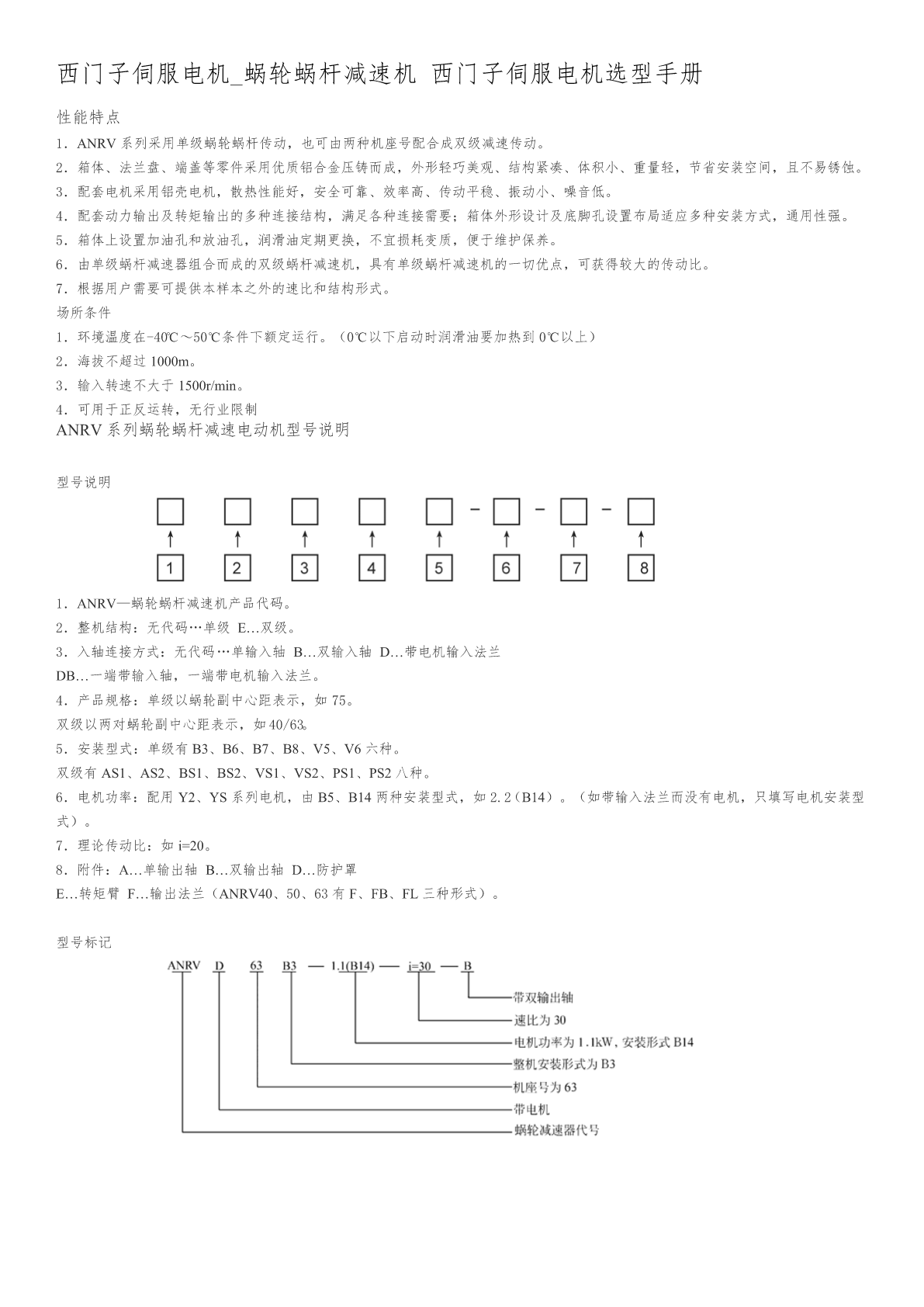
西门子伺服电机_蜗轮蜗杆减速机西门子伺服电机选型手册性能特点1.ANRV系列采用单级蜗轮蜗杆传动,也可由两种机座号配合成双级减速传动。2.箱体、法兰盘、端盖等零件采用优质铝合金压铸而成,外形轻巧美观、结构紧凑、体积小、重量轻,节省安装空间,且不易锈蚀。3.配套电机采用铝壳电机,散热性能好,安全可靠、效率高、传动平稳、振动小、噪音低。4.配套动力输出及转矩输出的多种连接结构,满足各种连接需要;箱体外形设计及底脚孔设置布局适应多种安装方式,通用性强。5.箱体上设置加油孔和放油孔,润滑油定期更换,不宜损耗变质,