
台达DVP28SV11PLC控制台达B2伺服接线及程序说明.doc

胜利****实阿

1/2
2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

台达DVP28SV11PLC控制台达B2伺服接线及程序说明.doc
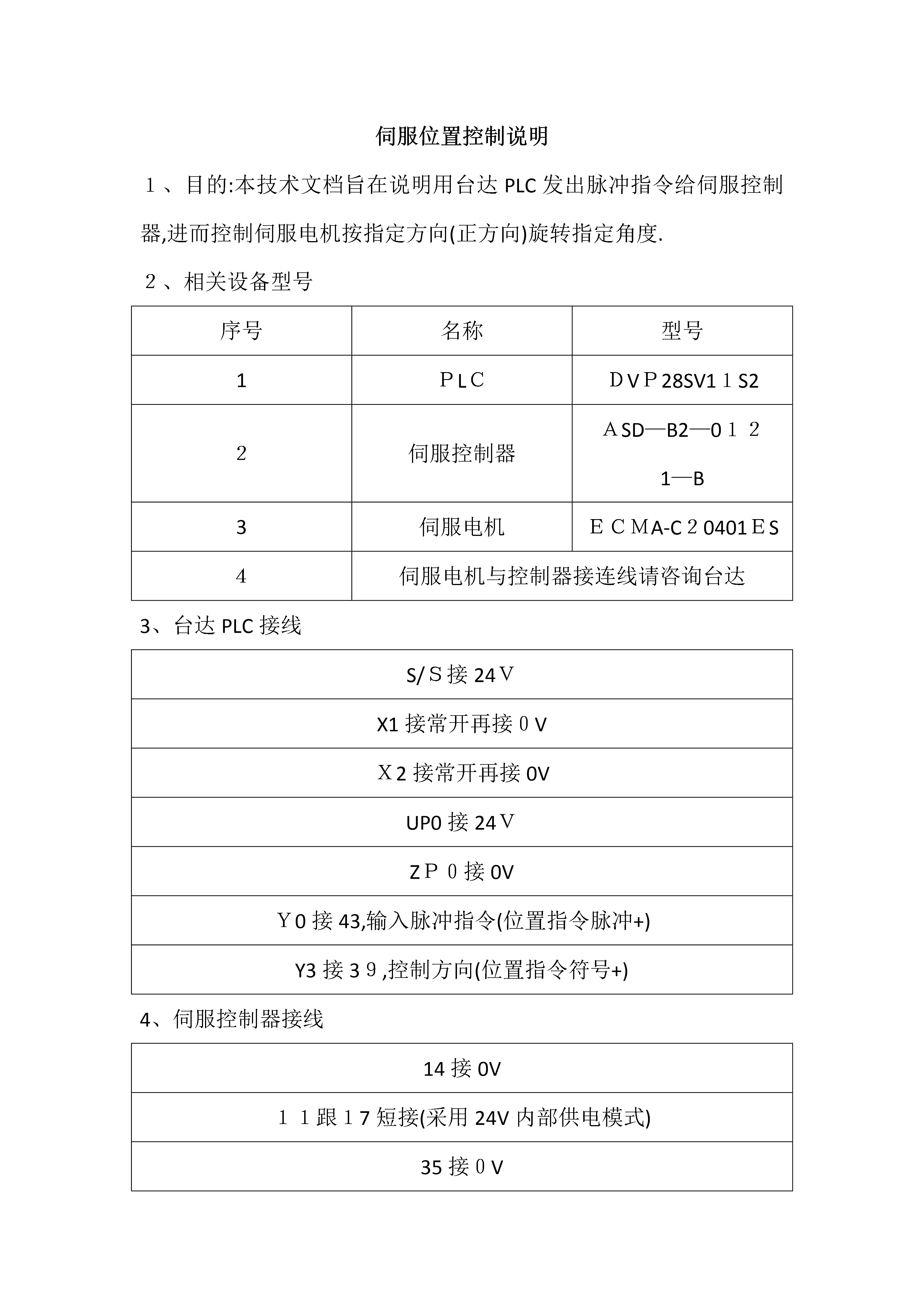
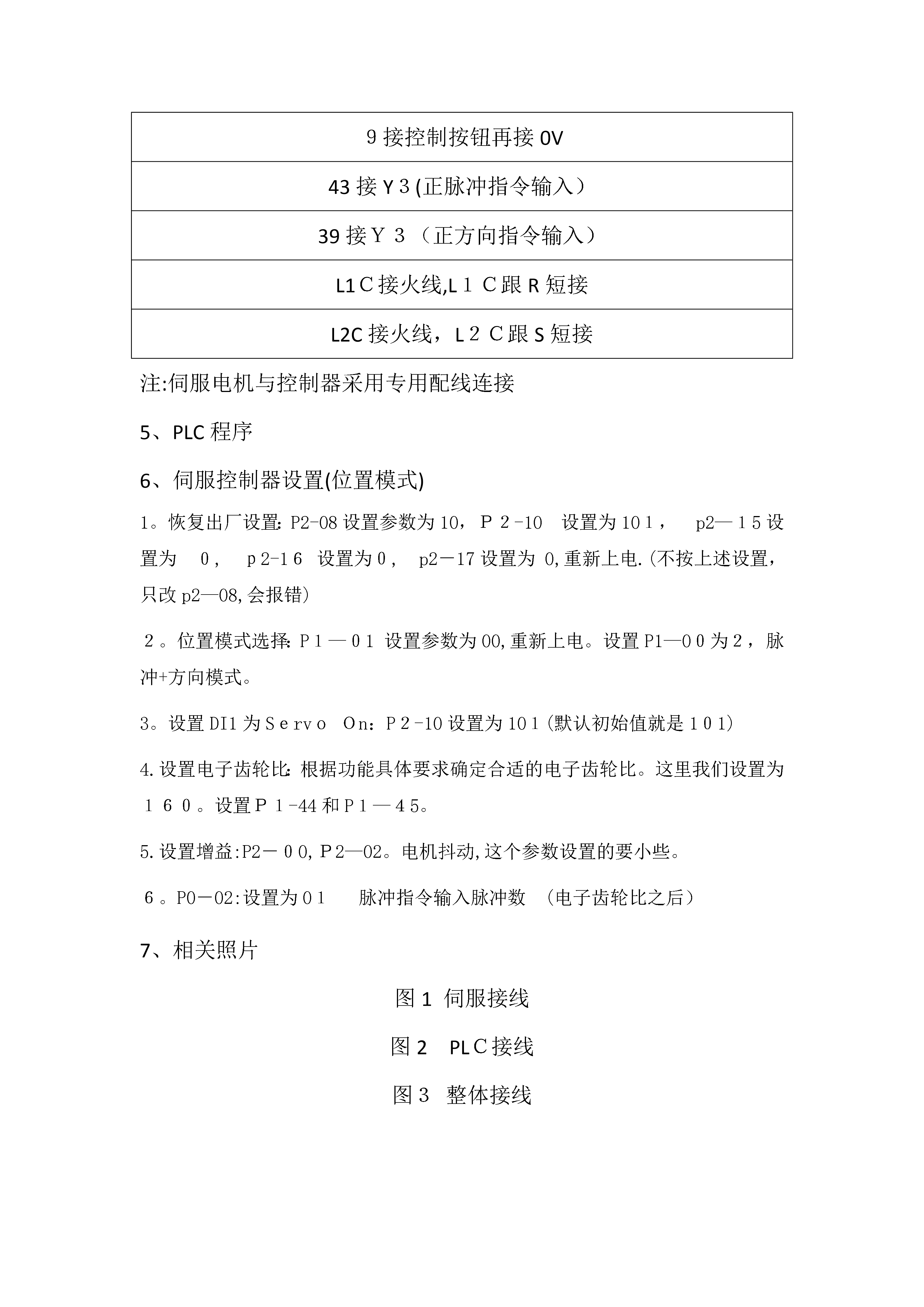
伺服位置控制说明1、目的:本技术文档旨在说明用台达PLC发出脉冲指令给伺服控制器,进而控制伺服电机按指定方向(正方向)旋转指定角度.2、相关设备型号序号名称型号1PLCDVP28SV11S22伺服控制器ASD—B2—0121—B3伺服电机ECMA-C20401ES4伺服电机与控制器接连线请咨询台达3、台达PLC接线S/S接24VX1接常开再接0VX2接常开再接0VUP0接24VZP0接0VY0接43,输入脉冲指令(位置指令脉冲+)Y3接39,控制方向(位置指令符号+)4、伺服控制器接线14接0V11跟17

西门子200smart控制台达B2系列伺服电机案例.pdf
西门子200smart控制台达B2系列伺服电机案例接线图如下:伺服参数设置,其他功能简略使用运动控制向导生成子程序,此处根据伺服电机编码器精度设置,精度为17-bit(160000p/rev),这个参数的意思是伺服电机旋转一周需要160000个脉冲。参数中设置电子齿轮比为16,那么电机转一圈需要160000/16=10000个脉冲此处的应用的最大电机速度与设定的每转需要的脉冲数有关。由于西门子200smartCPU的输出脉冲是100KHZ(也就是每秒输出100000个脉冲),由于前边设置了电机旋转一周行程
台达PLC控制伺服说明.pdf
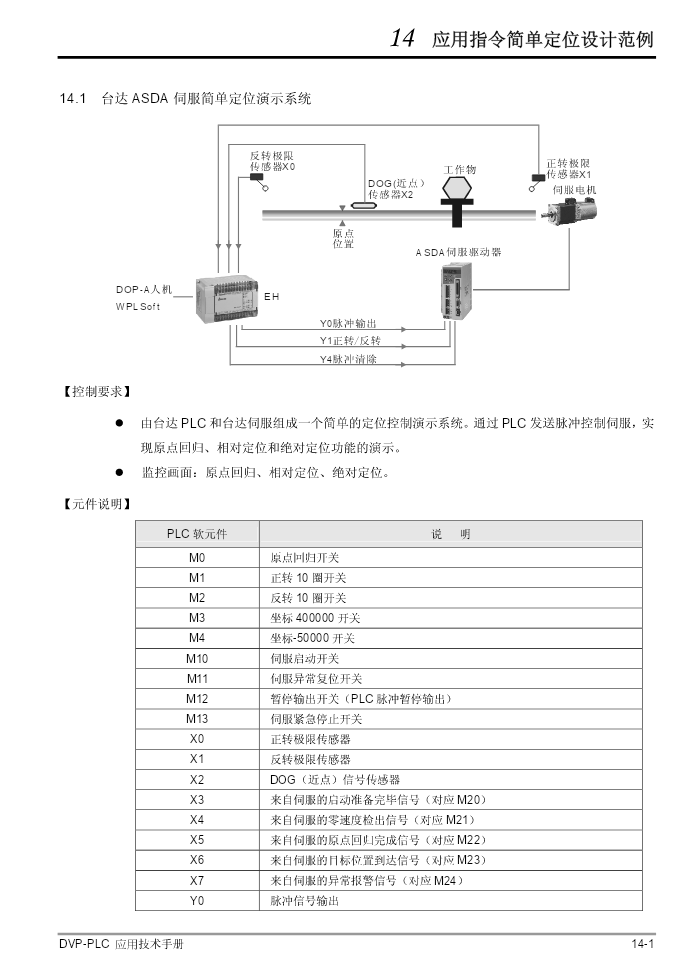
14应用指令简单定位设计范例14.1台达ASDA伺服简单定位演示系统反转极限正转极限传感器X0工作物传感器X1DOG(近点)伺服电机传感器X2原点位置ASDA伺服驱动器DOP-A人机EHWPLSoftY0脉冲输出Y1正转/反转Y4脉冲清除【控制要求】z由台达PLC和台达伺服组成一个简单的定位控制演示系统。通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。z监控画面:原点回归、相对定位、绝对定位。【元件说明】PLC软元件说明M0原点回归开关M1正转10圈开关M2反转10圈开关M3坐标4

台达伺服问答.doc
精品资料精品资料可编辑修改可编辑修改精品资料可编辑修改01、问台达交流伺服系统ASDA-M系列所提供DI/O功能与交流伺服系统ASDA-A2系列有何差异?答台达交流伺服系统ASDA-M系列各轴各提供6个DI,3个DO;共有18个DI,9个DO。交流伺服系统ASDA-A2则提供8个DI,5个DI。ASDA-M系列硬件的DI与DO分别在三轴的50PINConnector上,透过韧体的转换,可以将各轴6个DI与3个DO整合之后分配给其他轴使用。为避免一些共享DI重复及节省DI脚位,可透过参数设定三轴共享DI,目

台达伺服问答.doc
精品资料精品资料可编辑修改可编辑修改精品资料可编辑修改01、问台达交流伺服系统ASDA-M系列所提供DI/O功能与交流伺服系统ASDA-A2系列有何差异?答台达交流伺服系统ASDA-M系列各轴各提供6个DI,3个DO;共有18个DI,9个DO。交流伺服系统ASDA-A2则提供8个DI,5个DI。ASDA-M系列硬件的DI与DO分别在三轴的50PINConnector上,透过韧体的转换,可以将各轴6个DI与3个DO整合之后分配给其他轴使用。为避免一些共享DI重复及节省DI脚位,可透过参数设定三轴共享DI,目