
码垛机械手抓取机构.pdf

文库****品店

1/4
2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
码垛机械手抓取机构.pdf
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)申请公布号CN202828980U(43)申请公布日2013.03.27(21)申请号CN201220437858.0(22)申请日2012.08.30(71)申请人江苏依斯曼智能机械科技有限公司地址213000江苏省常州市武进区横林镇庆丰南路9号(72)发明人陈海军;徐寿平(74)专利代理机构浙江永鼎律师事务所代理人陆永强(51)Int.CI权利要求说明书说明书幅图(54)发明名称码垛机械手抓取机构(57)摘要本实用新型属于机械技术领域,涉

机械手抓取机构.pdf
本发明公开了一种机械手抓取机构,包括支撑机构、第一驱动装置、摆动组件、第二驱动装置和抓取装置,其中,支撑机构包括支撑主体和支撑杆,其中,支撑杆垂直设置于支撑主体的一端,支撑主体的另一端与摆动组件可枢转相连;第一驱动装置可伸缩且其一端与支撑杆可枢转相连,第一驱动装置的另一端与摆动组件可枢转相连;抓取装置与摆动组件可枢转相连,其中,摆动组件上设置有第一铰接座,抓取装置上设置有第二铰接座;第二驱动装置可伸缩且其一端与第一铰接座可枢转相连,第二驱动装置的另一端与第二铰接座可枢转相连。本申请实施例的机械手抓取机构,
一种新型码垛机抓取机构.pdf
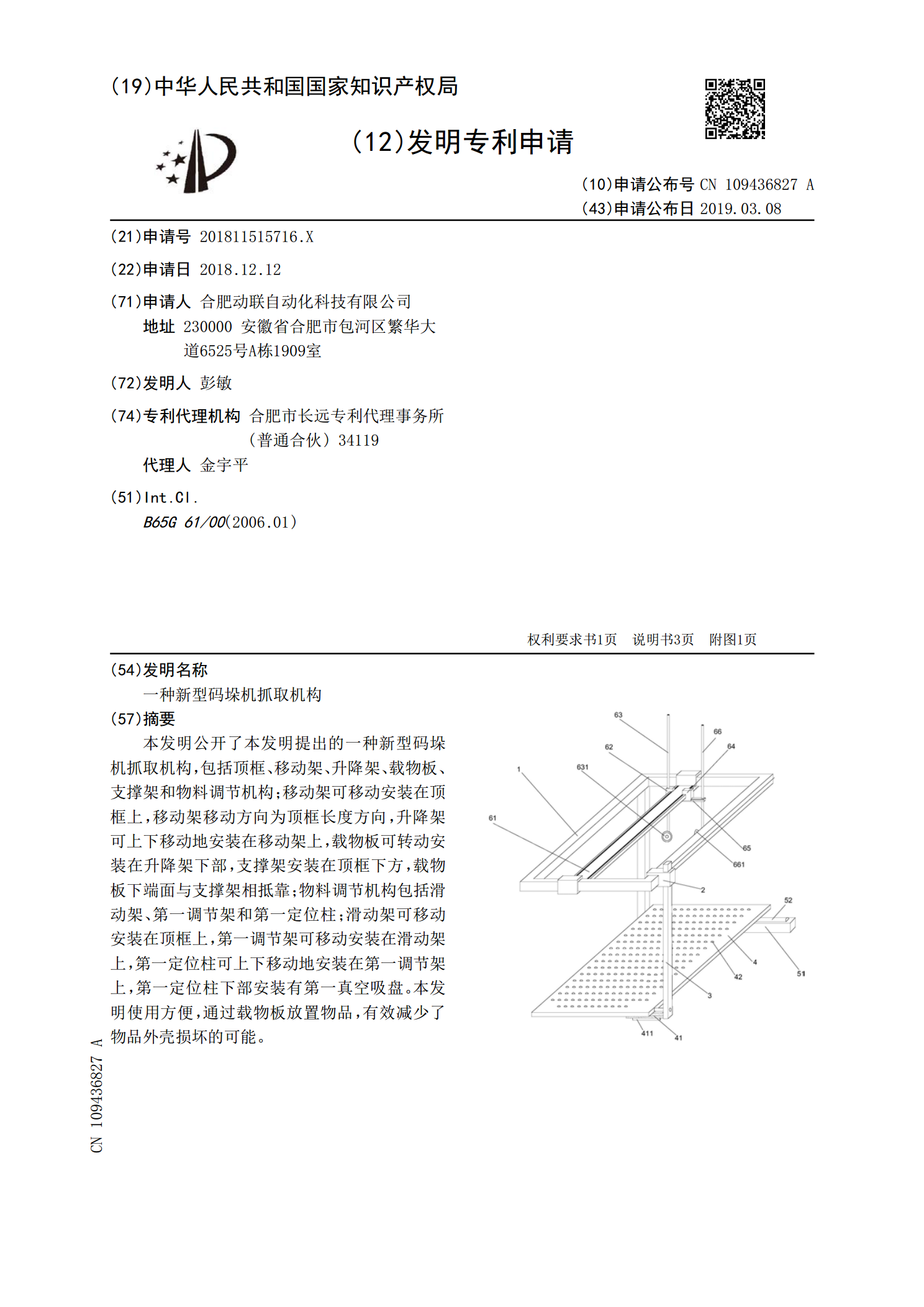
本发明公开了本发明提出的一种新型码垛机抓取机构,包括顶框、移动架、升降架、载物板、支撑架和物料调节机构;移动架可移动安装在顶框上,移动架移动方向为顶框长度方向,升降架可上下移动地安装在移动架上,载物板可转动安装在升降架下部,支撑架安装在顶框下方,载物板下端面与支撑架相抵靠;物料调节机构包括滑动架、第一调节架和第一定位柱;滑动架可移动安装在顶框上,第一调节架可移动安装在滑动架上,第一定位柱可上下移动地安装在第一调节架上,第一定位柱下部安装有第一真空吸盘。本发明使用方便,通过载物板放置物品,有效减少了物品外壳
烘干设备的机械手及抓取机构.pdf
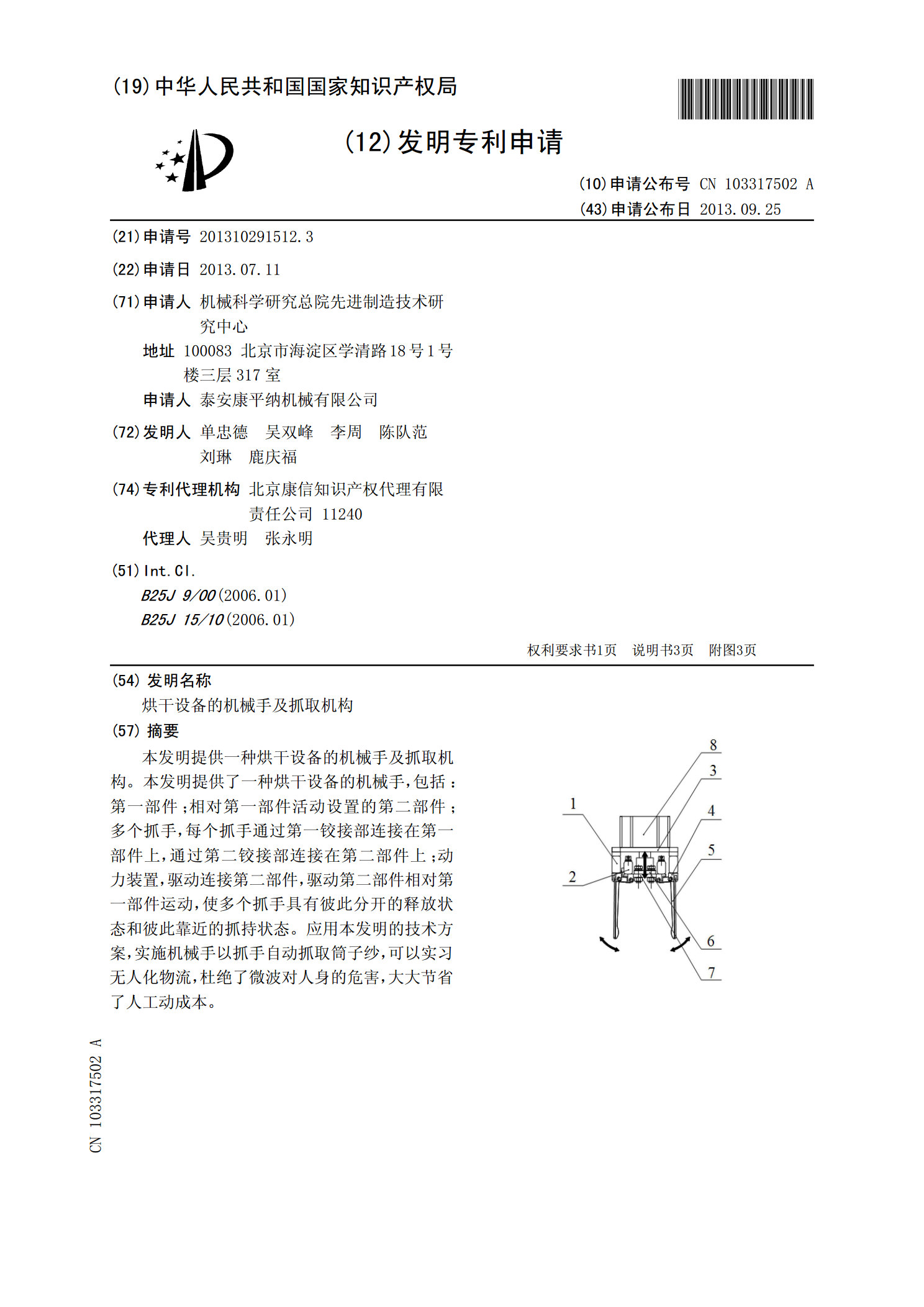
本发明提供一种烘干设备的机械手及抓取机构。本发明提供了一种烘干设备的机械手,包括:第一部件;相对第一部件活动设置的第二部件;多个抓手,每个抓手通过第一铰接部连接在第一部件上,通过第二铰接部连接在第二部件上;动力装置,驱动连接第二部件,驱动第二部件相对第一部件运动,使多个抓手具有彼此分开的释放状态和彼此靠近的抓持状态。应用本发明的技术方案,实施机械手以抓手自动抓取筒子纱,可以实习无人化物流,杜绝了微波对人身的危害,大大节省了人工动成本。
机械手的自定心抓取机构.pdf
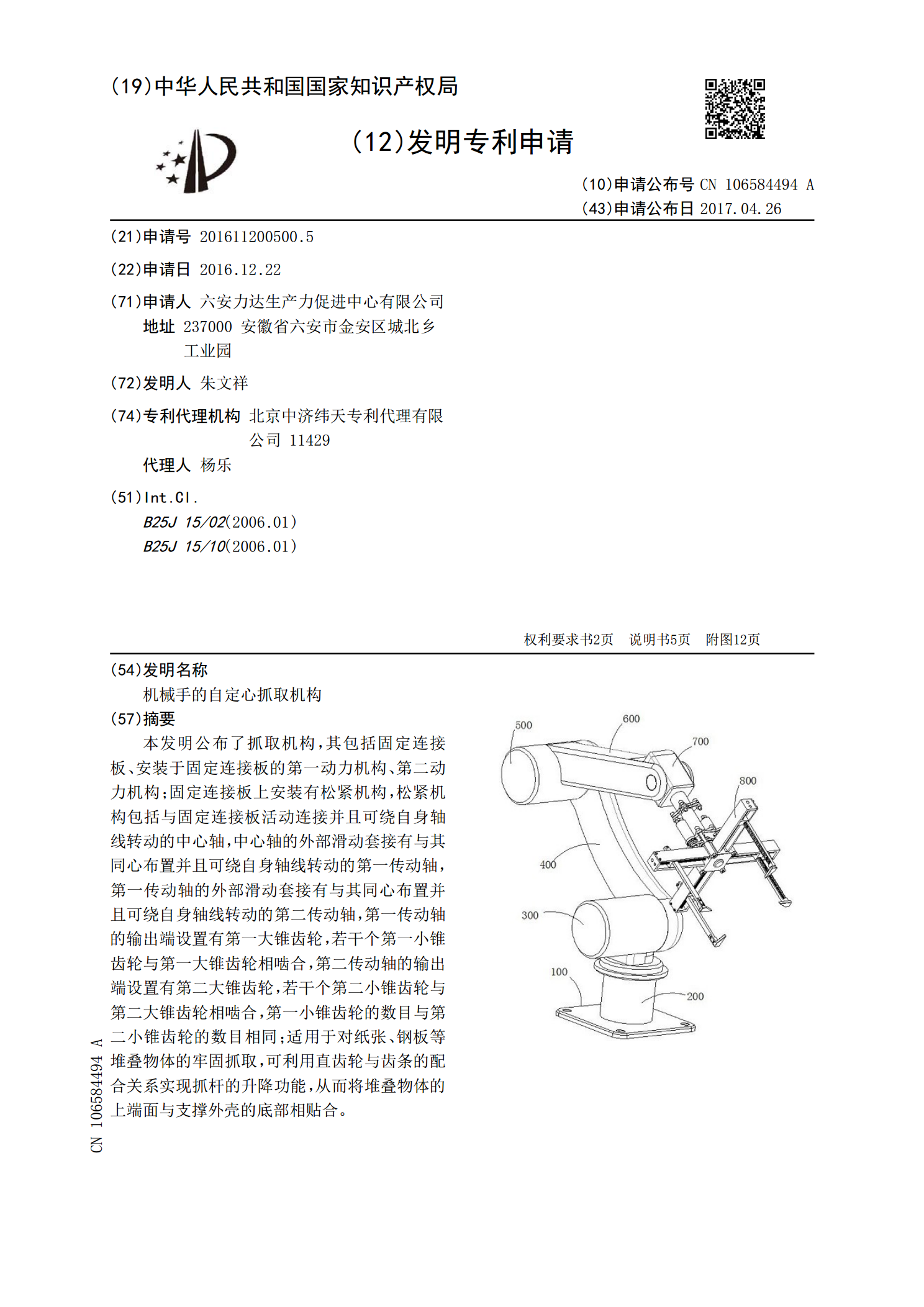
本发明公布了抓取机构,其包括固定连接板、安装于固定连接板的第一动力机构、第二动力机构;固定连接板上安装有松紧机构,松紧机构包括与固定连接板活动连接并且可绕自身轴线转动的中心轴,中心轴的外部滑动套接有与其同心布置并且可绕自身轴线转动的第一传动轴,第一传动轴的外部滑动套接有与其同心布置并且可绕自身轴线转动的第二传动轴,第一传动轴的输出端设置有第一大锥齿轮,若干个第一小锥齿轮与第一大锥齿轮相啮合,第二传动轴的输出端设置有第二大锥齿轮,若干个第二小锥齿轮与第二大锥齿轮相啮合,第一小锥齿轮的数目与第二小锥齿轮的数目