
BLDC电机控制算法瑞萨.pdf

文库****品店


1/10
2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
BLDC电机控制算法瑞萨.pdf
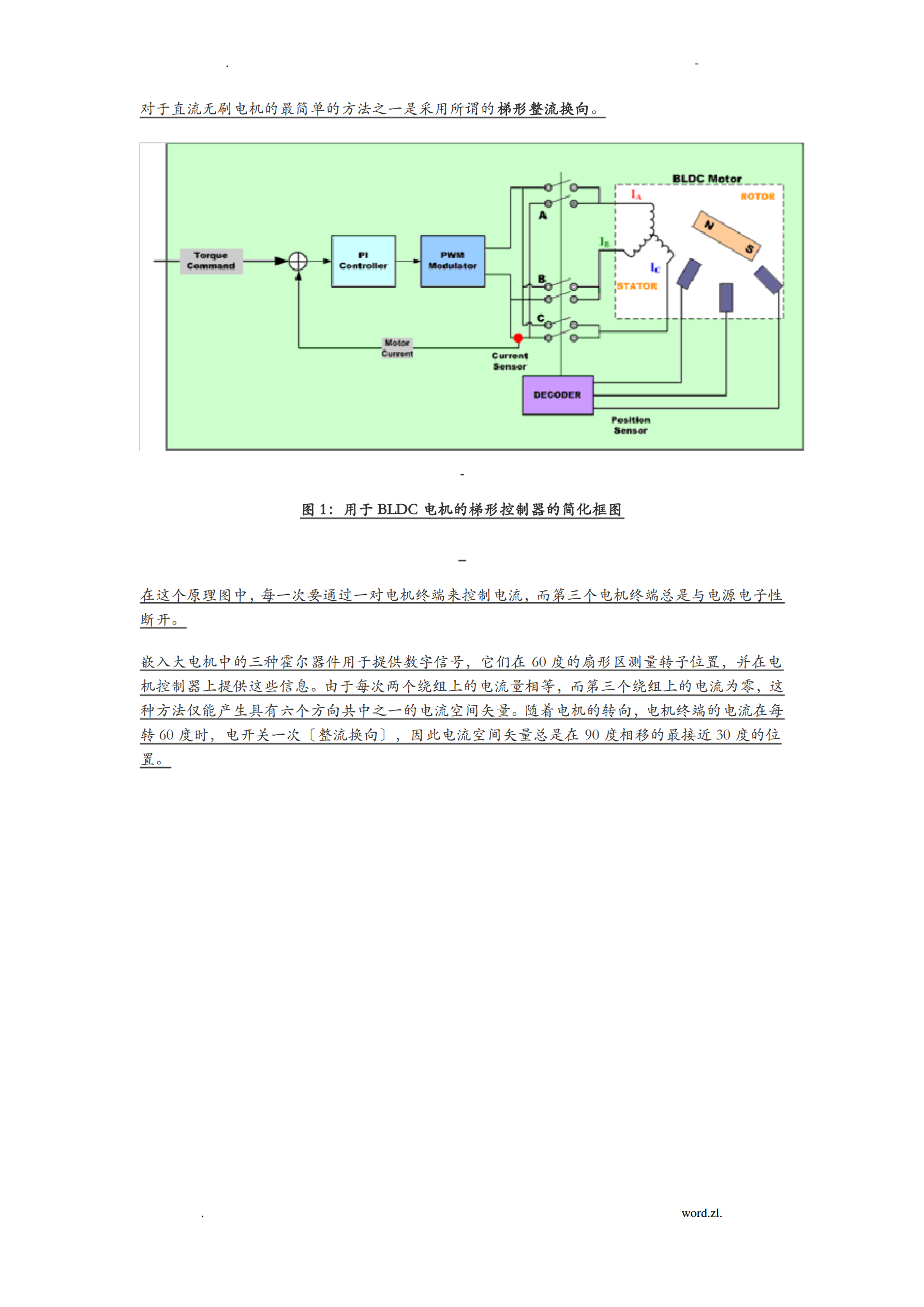
.-BLDC电机控制算法无刷电机属于自換流型(自我方向轉換),因此控制起来更加复杂。BLDC电机控制要求了解电机进展整流转向的转子位置和机制。对于闭环速度控制,有两个附加要求,即对于转子速度/或电机电流以及PWM信号进展测量,以控制电机速度功率。BLDC电机可以根据应用要求采用边排列或中心排列PWM信号。大多数应用仅要求速度变化操作,将采用6个独立的边排列PWM信号。这就提供了最高的分辨率。如果应用要求效劳器定位、能耗制动或动力倒转,推荐使用补充的中心排列PWM信号。为了感应转子位置,BLDC电机采用霍尔
单线圈BLDC电机的控制.pdf
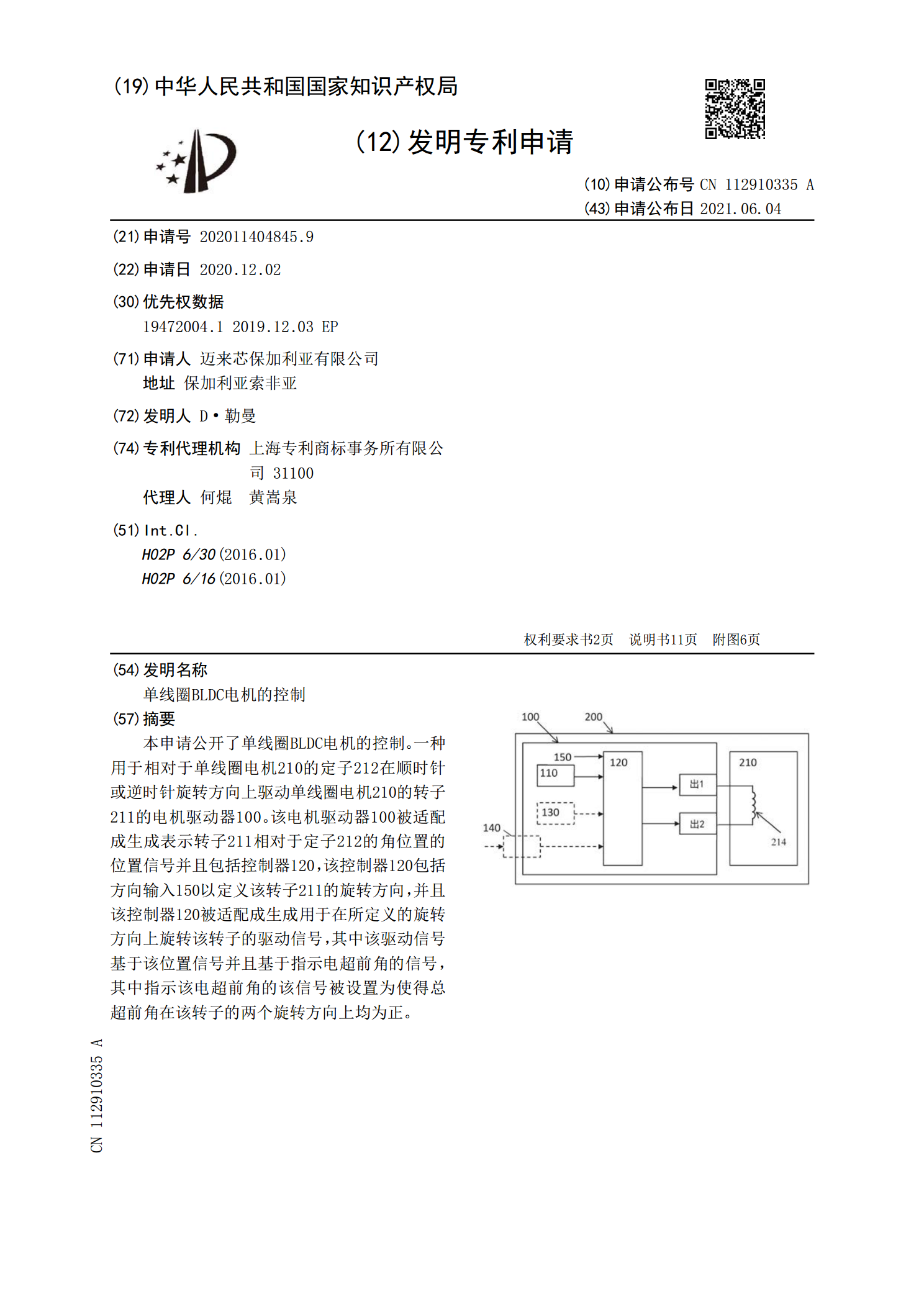
本申请公开了单线圈BLDC电机的控制。一种用于相对于单线圈电机210的定子212在顺时针或逆时针旋转方向上驱动单线圈电机210的转子211的电机驱动器100。该电机驱动器100被适配成生成表示转子211相对于定子212的角位置的位置信号并且包括控制器120,该控制器120包括方向输入150以定义该转子211的旋转方向,并且该控制器120被适配成生成用于在所定义的旋转方向上旋转该转子的驱动信号,其中该驱动信号基于该位置信号并且基于指示电超前角的信号,其中指示该电超前角的该信号被设置为使得总超前角在该转子的两

BLDC电机基本控制原理.ppt
注:n为要积分的数值。A:转速控制就是改变电机两端的电压来控制电机的转速B:当检测到转速低于设定转速时通过增加电机两端的电压,当检测到转速高于设定转速时减少电机电机两端的电压,通过PID控制就可以实现转速的稳定结束

基于模型设计的BLDC电机调速控制.docx
基于模型设计的BLDC电机调速控制论文题目:基于模型设计的BLDC电机调速控制摘要:无刷直流电机(BLDC)在许多应用领域中得到了广泛的应用,如工业制造、汽车、家用电器等。为了实现对BLDC电机的高效、稳定的调速控制,许多控制策略被提出并应用于实际系统中。本论文针对BLDC电机调速控制问题,基于模型设计的方法进行研究,并通过仿真实验验证其有效性和鲁棒性。第一部分:绪论1.1研究背景1.2研究目的和意义1.3文章结构第二部分:BLDC电机及其数学模型2.1BLDC电机结构及工作原理2.2BLDC电机的数学模
BLDC电机组件.pdf
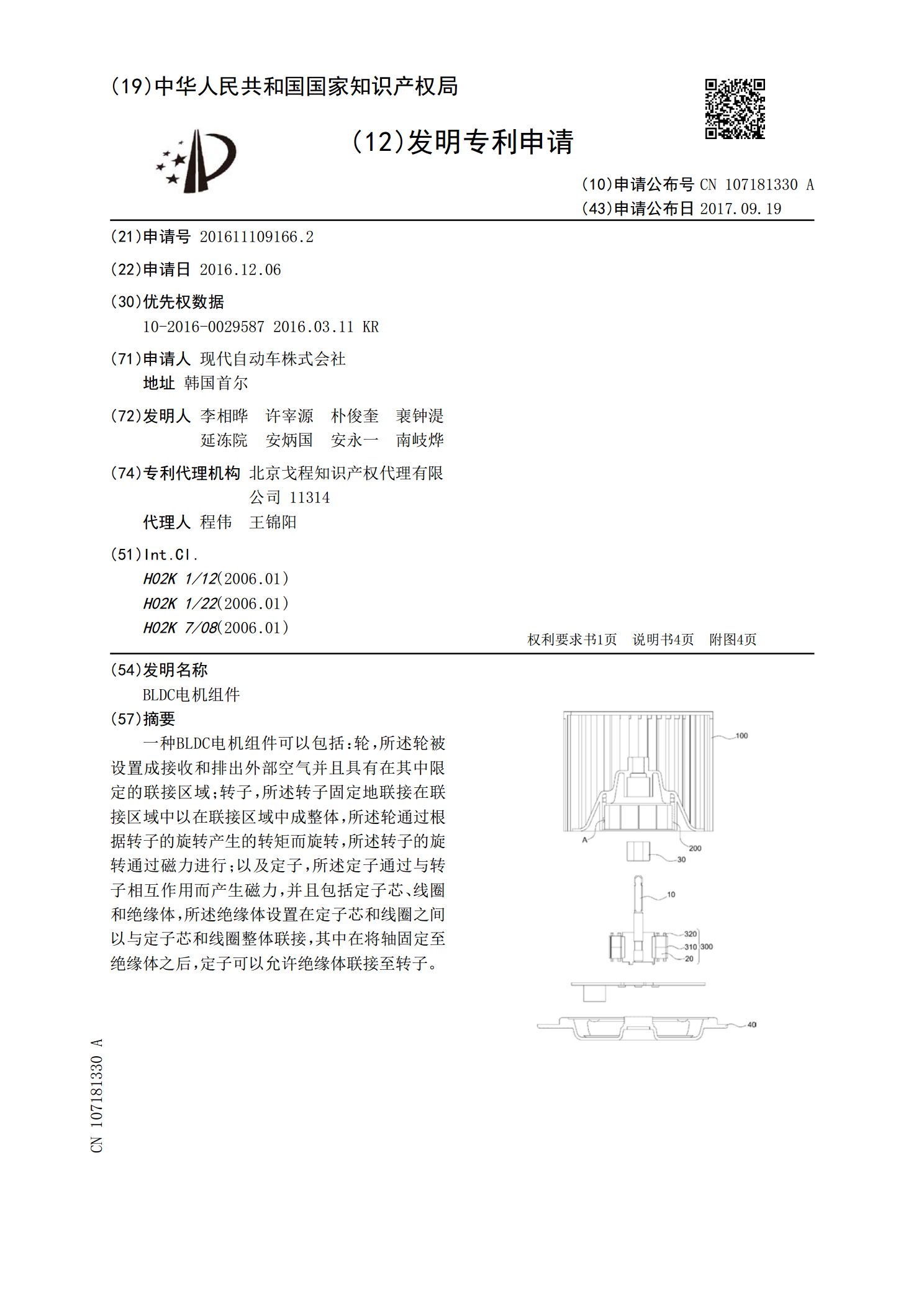
一种BLDC电机组件可以包括:轮,所述轮被设置成接收和排出外部空气并且具有在其中限定的联接区域;转子,所述转子固定地联接在联接区域中以在联接区域中成整体,所述轮通过根据转子的旋转产生的转矩而旋转,所述转子的旋转通过磁力进行;以及定子,所述定子通过与转子相互作用而产生磁力,并且包括定子芯、线圈和绝缘体,所述绝缘体设置在定子芯和线圈之间以与定子芯和线圈整体联接,其中在将轴固定至绝缘体之后,定子可以允许绝缘体联接至转子。