
DH坐标系建立省公共课一等奖全国赛课获奖课件.pptx

胜利****实阿


1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共55页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

DH坐标系建立省公共课一等奖全国赛课获奖课件.pptx
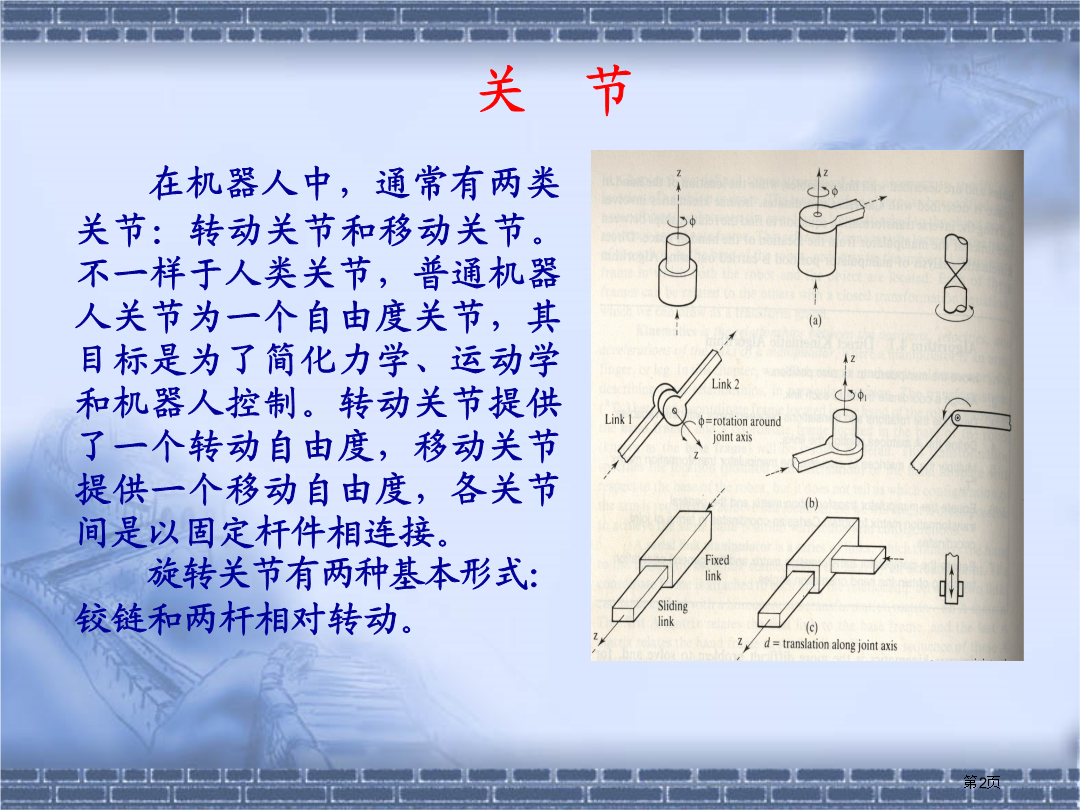
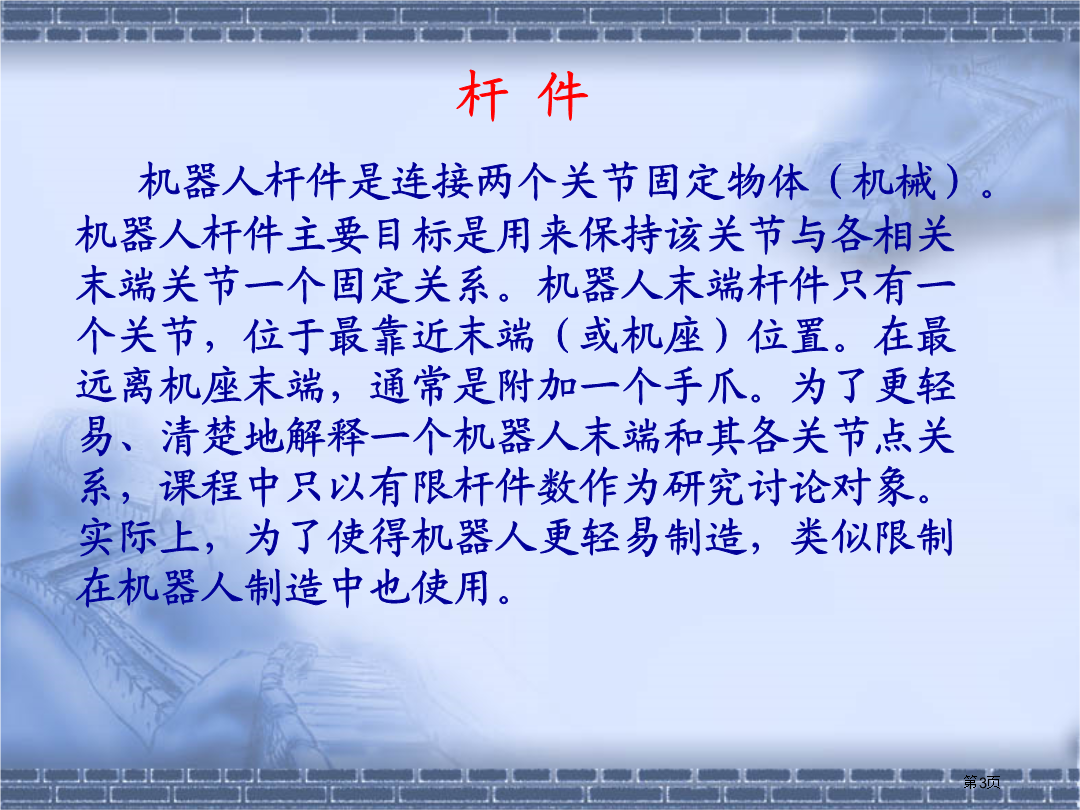
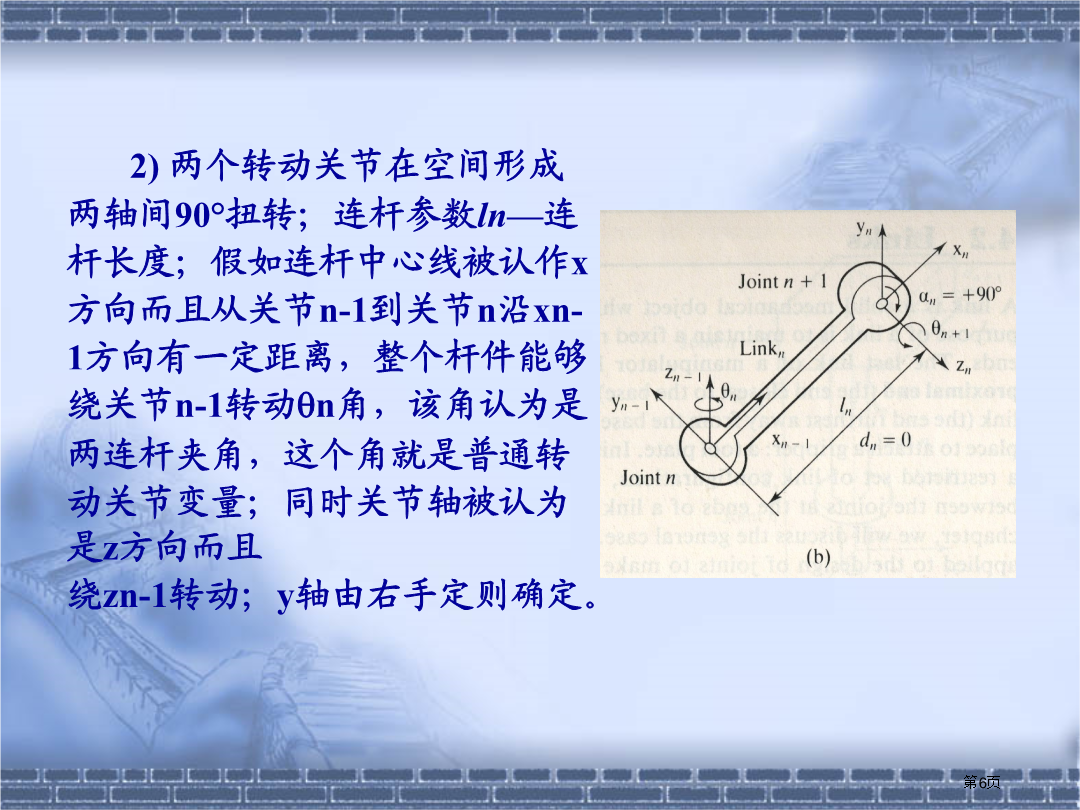
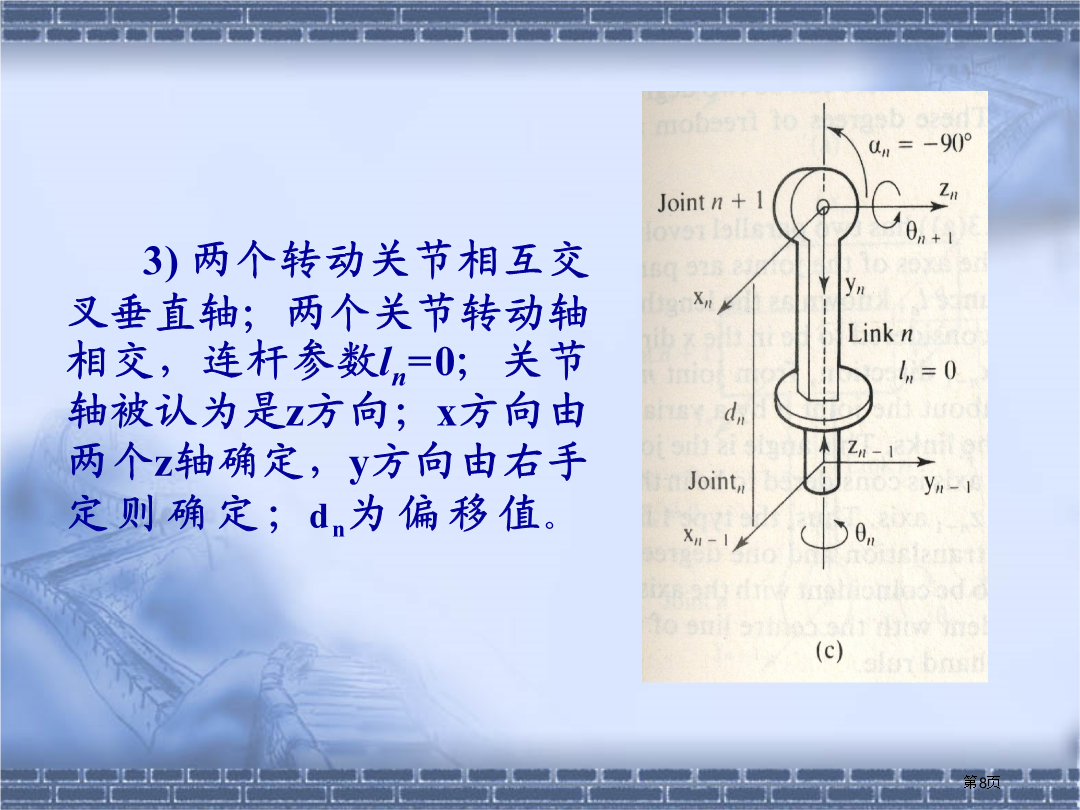
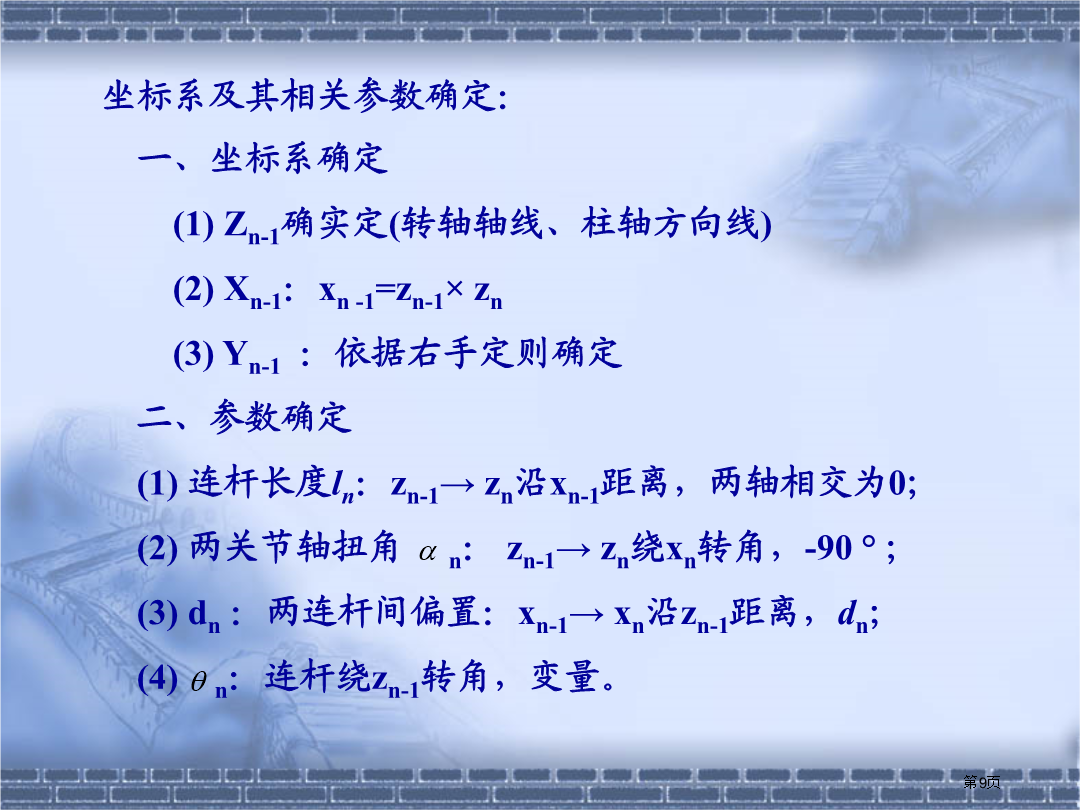
§2.8正逆运动学求解基础知识在机器人中,通常有两类关节:转动关节和移动关节。不一样于人类关节,普通机器人关节为一个自由度关节,其目标是为了简化力学、运动学和机器人控制。转动关节提供了一个转动自由度,移动关节提供一个移动自由度,各关节间是以固定杆件相连接。旋转关节有两种基本形式:铰链和两杆相对转动。杆件下面给出了八种类型常见杆件构形:坐标系及其相关参数确定:一、坐标系确定(1)Zn-1确实定(转轴轴线)(2)Xn-1:垂直两连杆公垂线xn-1=zn-1→zn(3)Yn-1:依据右手定则确定二、参数确定(1

测量坐标系统省公共课一等奖全国赛课获奖课件.pptx
数字测图原理及方法第一章绪论1.4测量坐标系测量工作基本任务是确定点空间位置。一个点空间位置,需要三个量来确定。(经度、纬度和高程或X、Y、H)为了简化计算,要将(椭)球面上元素归算(投影)到平面上。所谓投影就是建立起(椭)球面上点与平面上点一一对应数学关系。地图投影学就是研究这个问题学科,是数学也是地理学一个分支学科.基本类型有:圆锥投影,圆柱投影,平面投影,任意投影等。测量坐标系统一、大地坐标系二、空间直角坐标系三、独立平面直角坐标系四、高斯平面直角坐标系五、绝对高程一、大地坐标系赤道平面我国当前采取
极坐标系省公共课一等奖全国赛课获奖课件.pptx
(一)极坐标系O某同学在教学楼处,(1)向东偏北60°方向走120m抵达什么位置(2)假如有些人探询试验楼和办公楼位置,他应怎样描述?解:以A为极点,AB所在射线为极轴建立极坐标系。①平面上一点极坐标是否唯一?②若不唯一,那有多少种表示方法?③坐标不唯一是由谁引发?④不一样极坐标是否能够写出统一表示式?问题:怎样要求ρ、θ范围,使平面内确定一点极坐标是唯一?极坐标系下点与它极坐标对应情况:[3]一点极坐标是否有统一表示式?(二)极坐标和直角坐标互化O极坐标与直角坐标互化关系式:互化公式三个前提条件:1.极

建立数学模型省公共课一等奖全国赛课获奖课件.pptx
第一章建立数学模型玩具、照片、飞机、火箭模型……你碰到过数学模型——“航行问题”航行问题建立数学模型基本步骤数学模型(MathematicalModel)和数学建模(MathematicalModeling)1.2数学建模主要意义数学建模详细应用1.3数学建模示例模型组成用数学语言把椅子位置和四只脚着地关系表示出来模型求解1.3.2商人们怎样安全过河模型组成(3)因为k为奇数时船从此岸驶向彼岸,k为偶数时船从彼岸驶回此岸,所以状态随决议改变规律是模型求解小结:图方法背景指数增加模型——马尔萨斯提出(179
建立自信主题班会省公共课一等奖全国赛课获奖课件.pptx
什么是自信?自信人共有特征:活泼、坦诚、虚心、大度、轻松、言行一致、开放、幽默、勇敢、果断等。你自信有几分?看看自己:(一)主动自我暗示三)树立自信外部形象四)要学会微笑想一想、议一议:不要小瞧自己,相信自己能行。超越自己杨扬我没有理由自暴自弃谈一谈他们成功秘诀是什么?拥有自信,你将与众不一样!故事一:故事二:想一想:分享:自信,即相信自己!自信是开发潜能前提自卑自信者自卑表现:自惭形秽,总以为自己不如他人;自暴自弃,消极失望;自我埋没,缺乏信心等。自卑起源于个人不正确思维:把分数看得过重,对自己和他人作