
常用机构(机械传动).ppt

胜利****实阿

1/10
2/10
3/10
4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共155页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
常用机构(机械传动).ppt
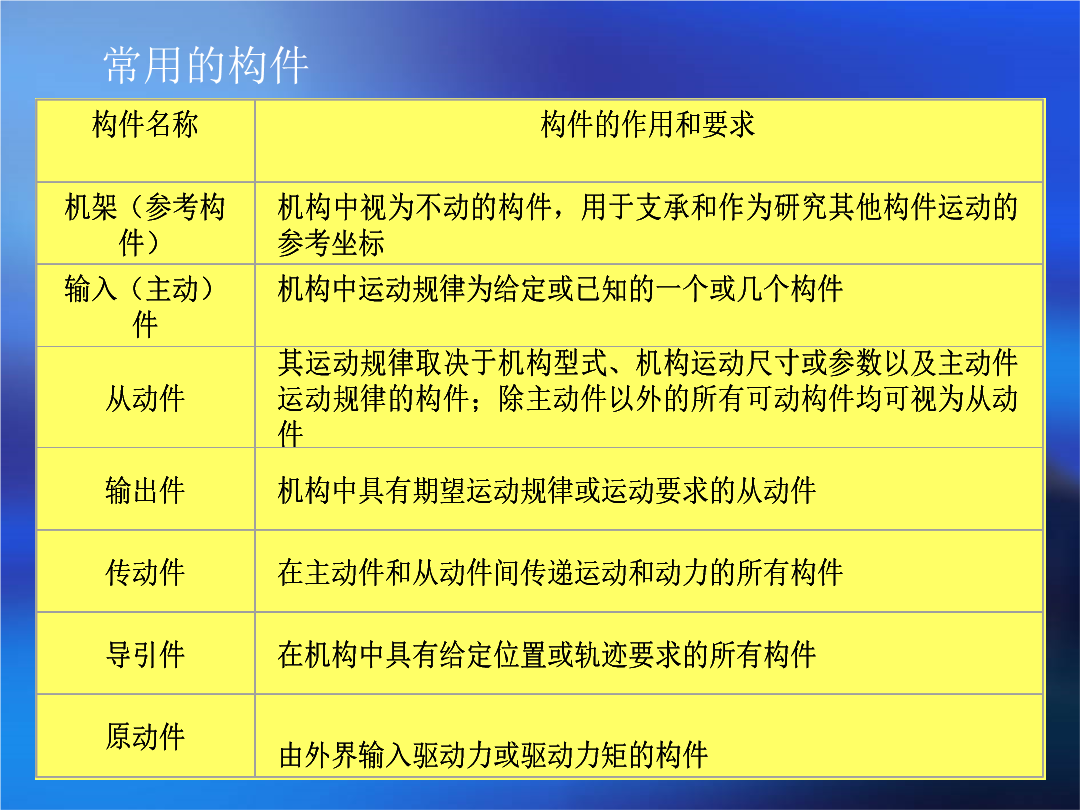
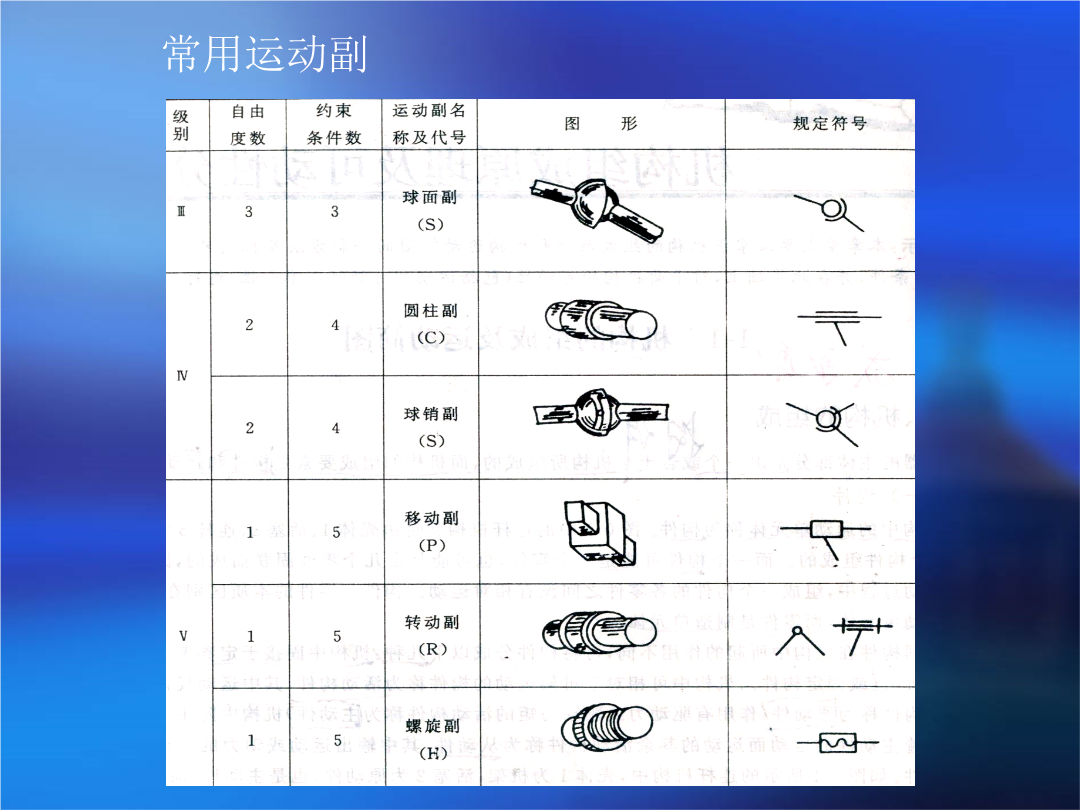
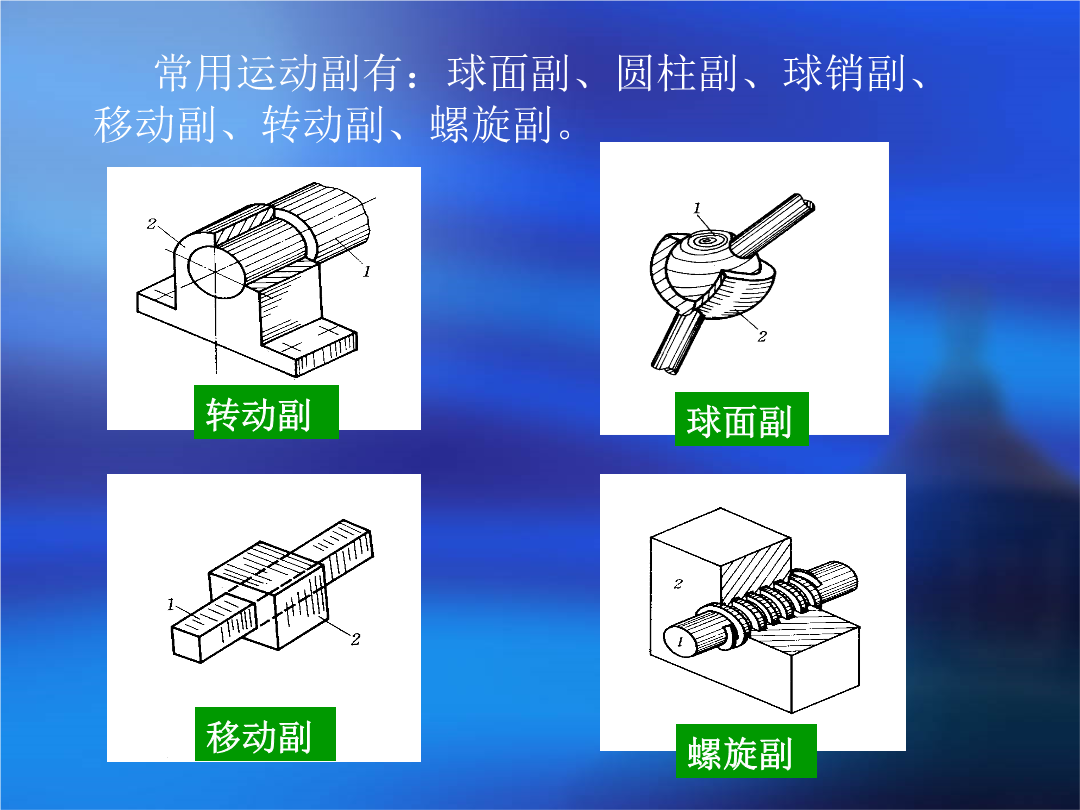
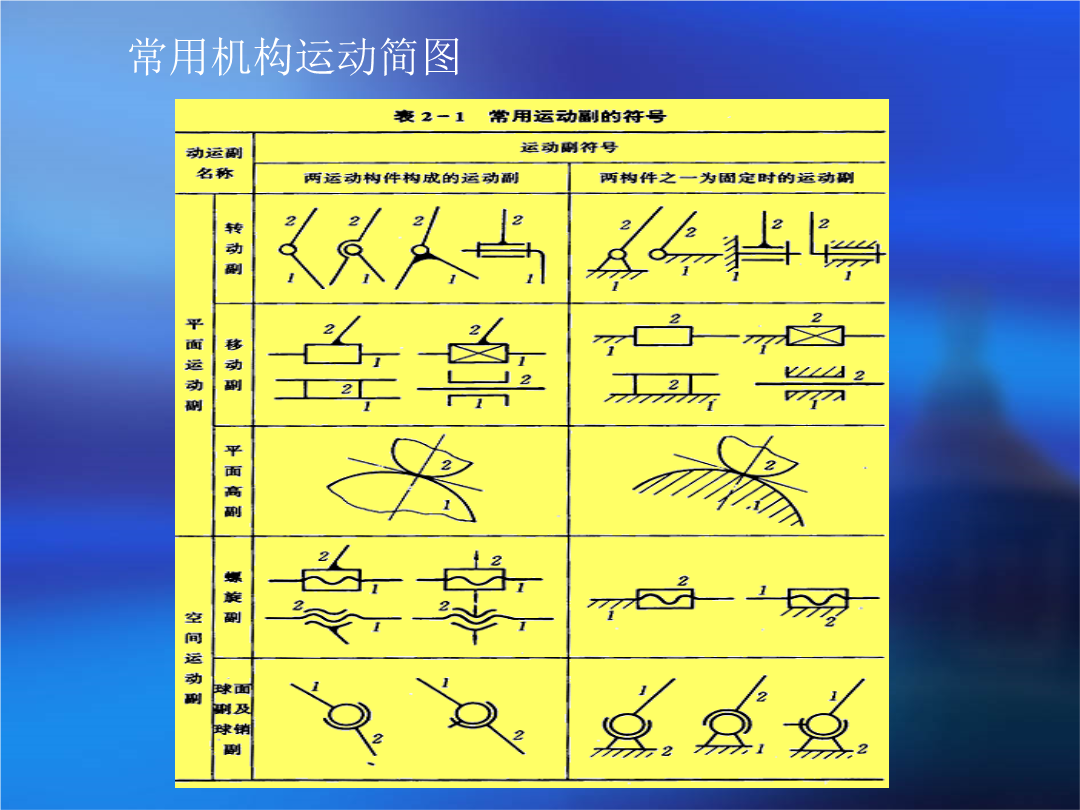
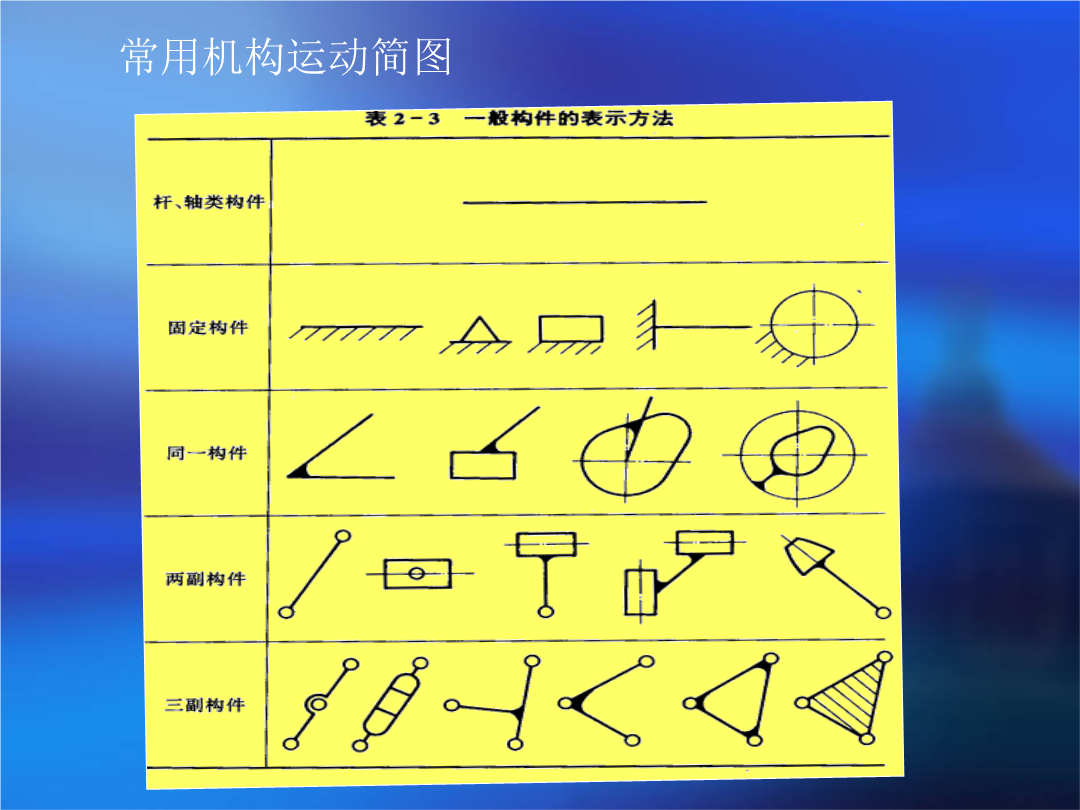
机械设计常用机构常用的构件常用运动副常用运动副有:球面副、圆柱副、球销副、移动副、转动副、螺旋副。运动链:用运动副连接而成的相对可动的构件系统。闭式链:运动链的各构件构成首尾封闭的系统。开式链:运动链的各构件未构成首尾封闭的系统。运动副中构件间的接触形式有三种:点、线、面。自由度:一个构件相对另一个构件可能出现的独立运动。一个自由构件在空间具有6个自由度。约束:指通过运动副联接的两构件之间的某些相对独立运动所受到的限制。根据运动副对被联接的两构件相对运动约束的不同,可将运动副分为Ⅰ至Ⅴ级,如:引入一个约束

常用机构(机械传动).ppt
机械设计常用机构常用的构件常用运动副常用运动副有:球面副、圆柱副、球销副、移动副、转动副、螺旋副。运动链:用运动副连接而成的相对可动的构件系统。闭式链:运动链的各构件构成首尾封闭的系统。开式链:运动链的各构件未构成首尾封闭的系统。运动副中构件间的接触形式有三种:点、线、面。自由度:一个构件相对另一个构件可能出现的独立运动。一个自由构件在空间具有6个自由度。约束:指通过运动副联接的两构件之间的某些相对独立运动所受到的限制。根据运动副对被联接的两构件相对运动约束的不同,可将运动副分为Ⅰ至Ⅴ级,如:引入一个约束

机械传动基础和常用机构.ppt
第7章常用机构第三篇机械传动第三篇机械传动构件的分类:(功能性分类)相对固定构件——称为机架(fixedlink,frame)活动构件(movinglink)原动件(drivinglink)从动件(drivenlink,follower)连接件(link)第三篇机械传动第三篇机械传动内燃机第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动平面机构的自由度平面机构的自由度3、平面机构的自由度

常用机构(机械传动)ppt课件.ppt
机械设计常用机构常用的构件常用运动副常用运动副有:球面副、圆柱副、球销副、移动副、转动副、螺旋副。运动链:用运动副连接而成的相对可动的构件系统。闭式链:运动链的各构件构成首尾封闭的系统。开式链:运动链的各构件未构成首尾封闭的系统。运动副中构件间的接触形式有三种:点、线、面。自由度:一个构件相对另一个构件可能出现的独立运动。一个自由构件在空间具有6个自由度。约束:指通过运动副联接的两构件之间的某些相对独立运动所受到的限制。根据运动副对被联接的两构件相对运动约束的不同,可将运动副分为Ⅰ至Ⅴ级,如:引入一个约束

模块5 常用机构和机械传动 1.doc
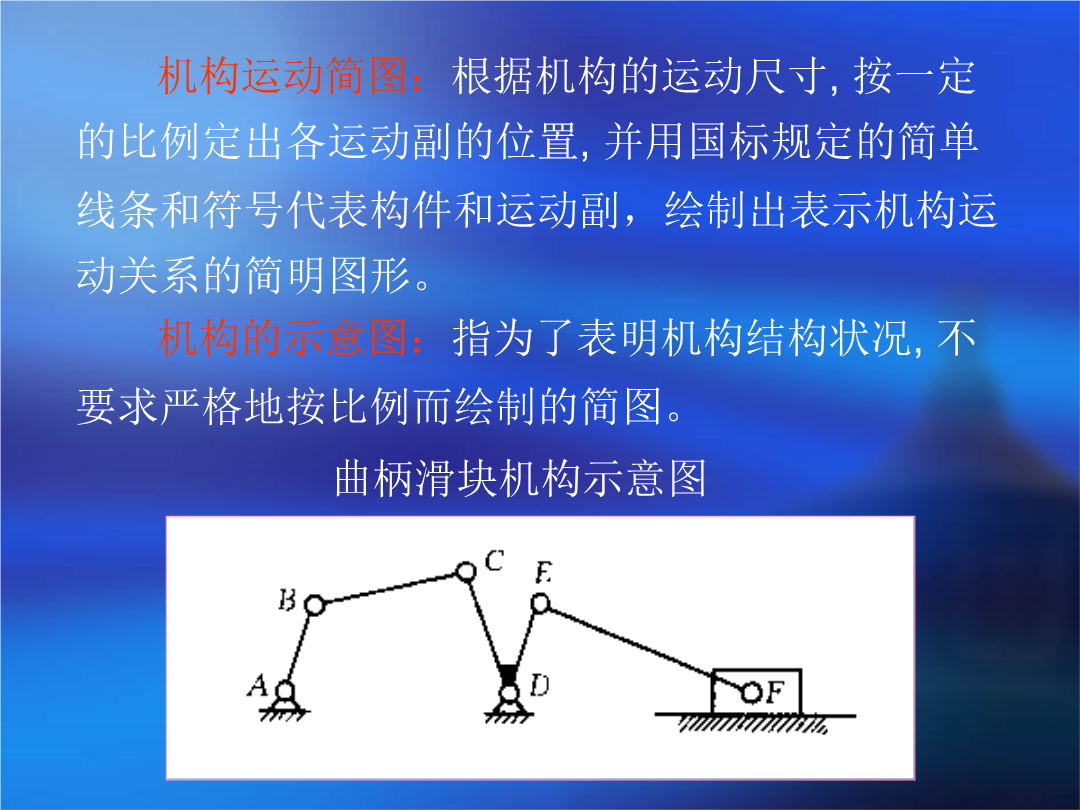
模块5常用机构和机械传动单元21平面连杆机构课题1运动副和运动简图运动副的概念由两构件直接接触组成的可动连接称为运动副。运动副的分类机构运动见图用规定的构件和运动副符号来表示机构的简化示意图称为机构简图。用长度比例尺画出的机构简图,称为机构运动简图。如图是碎石机的运动简图:课题2平面连杆机构全部用转动副组成的平面四杆机构称为铰链四杆机构,按照连架杆是曲柄还是摇杆,将铰链四杆机构分为三种基本型式:曲柄摇杆机构、双曲柄机构和双摇杆机构。铰链四杆机构搅拌机一、四杆机构的基本形式1.曲柄摇杆机构曲柄摇杆机构的特点