
常用机构(机械传动)ppt课件.ppt

天马****23


1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共156页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

常用机构(机械传动)ppt课件.ppt
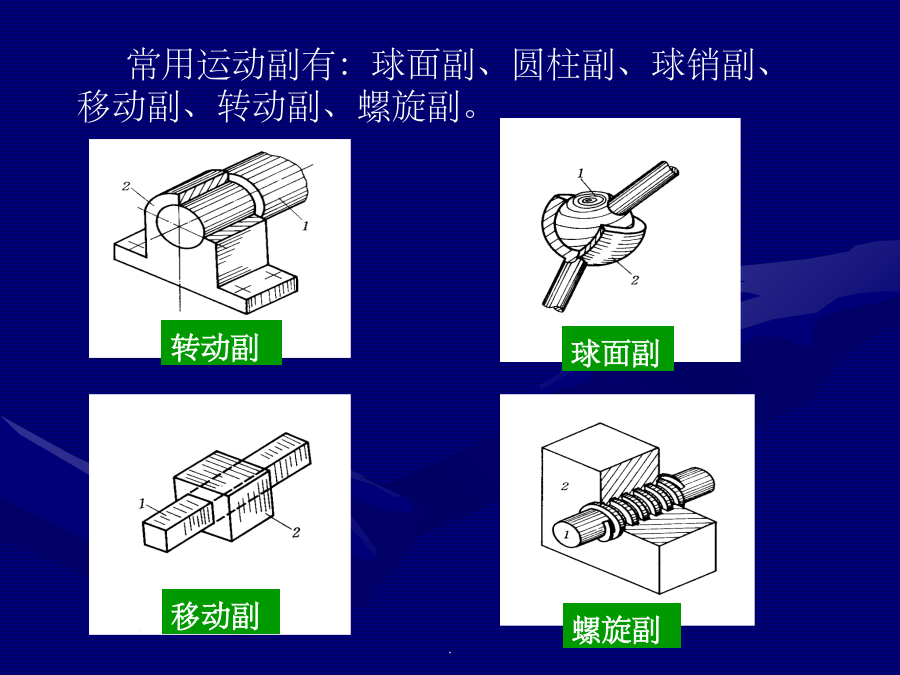
机械设计常用机构常用的构件常用运动副常用运动副有:球面副、圆柱副、球销副、移动副、转动副、螺旋副。运动链:用运动副连接而成的相对可动的构件系统。闭式链:运动链的各构件构成首尾封闭的系统。开式链:运动链的各构件未构成首尾封闭的系统。运动副中构件间的接触形式有三种:点、线、面。自由度:一个构件相对另一个构件可能出现的独立运动。一个自由构件在空间具有6个自由度。约束:指通过运动副联接的两构件之间的某些相对独立运动所受到的限制。根据运动副对被联接的两构件相对运动约束的不同,可将运动副分为Ⅰ至Ⅴ级,如:引入一个约束

常用机构(机械传动).ppt
机械设计常用机构常用的构件常用运动副常用运动副有:球面副、圆柱副、球销副、移动副、转动副、螺旋副。运动链:用运动副连接而成的相对可动的构件系统。闭式链:运动链的各构件构成首尾封闭的系统。开式链:运动链的各构件未构成首尾封闭的系统。运动副中构件间的接触形式有三种:点、线、面。自由度:一个构件相对另一个构件可能出现的独立运动。一个自由构件在空间具有6个自由度。约束:指通过运动副联接的两构件之间的某些相对独立运动所受到的限制。根据运动副对被联接的两构件相对运动约束的不同,可将运动副分为Ⅰ至Ⅴ级,如:引入一个约束
常用机构(机械传动).ppt
机械设计常用机构常用的构件常用运动副常用运动副有:球面副、圆柱副、球销副、移动副、转动副、螺旋副。运动链:用运动副连接而成的相对可动的构件系统。闭式链:运动链的各构件构成首尾封闭的系统。开式链:运动链的各构件未构成首尾封闭的系统。运动副中构件间的接触形式有三种:点、线、面。自由度:一个构件相对另一个构件可能出现的独立运动。一个自由构件在空间具有6个自由度。约束:指通过运动副联接的两构件之间的某些相对独立运动所受到的限制。根据运动副对被联接的两构件相对运动约束的不同,可将运动副分为Ⅰ至Ⅴ级,如:引入一个约束

机械传动基础和常用机构.ppt
第7章常用机构第三篇机械传动第三篇机械传动构件的分类:(功能性分类)相对固定构件——称为机架(fixedlink,frame)活动构件(movinglink)原动件(drivinglink)从动件(drivenlink,follower)连接件(link)第三篇机械传动第三篇机械传动内燃机第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动第三篇机械传动平面机构的自由度平面机构的自由度3、平面机构的自由度

常用机构--凸轮机构PPT课件.ppt
第七章常用机构第三节凸轮机构和螺旋机构凸轮机构应用举例内燃机配气机构自动车床走刀机构冲床凸轮机构自动车床凸轮机构靠模车削机构凸轮机构——依靠凸轮轮廓直接与从动件接触,迫使从动件作有规律的直线往复运动(直动)或摆动。一、凸轮机构的分类二、凸轮机构的应用特点一、凸轮机构的分类尖顶移动从动杆盘形凸轮机构移动从动杆移动凸轮机构圆柱凸轮机构(二)按从动件运动副元素的形状分(三)按从动件的运动形式分(四)按凸轮与从动件维持高副接触(封闭)的方式分形封闭型凸轮机构形封闭型凸轮机构二、凸轮机构的应用特点1)根据工作要求,