
折臂式高空作业车.pdf

一吃****天材

1/4
2/4
3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

折臂式高空作业车.pdf
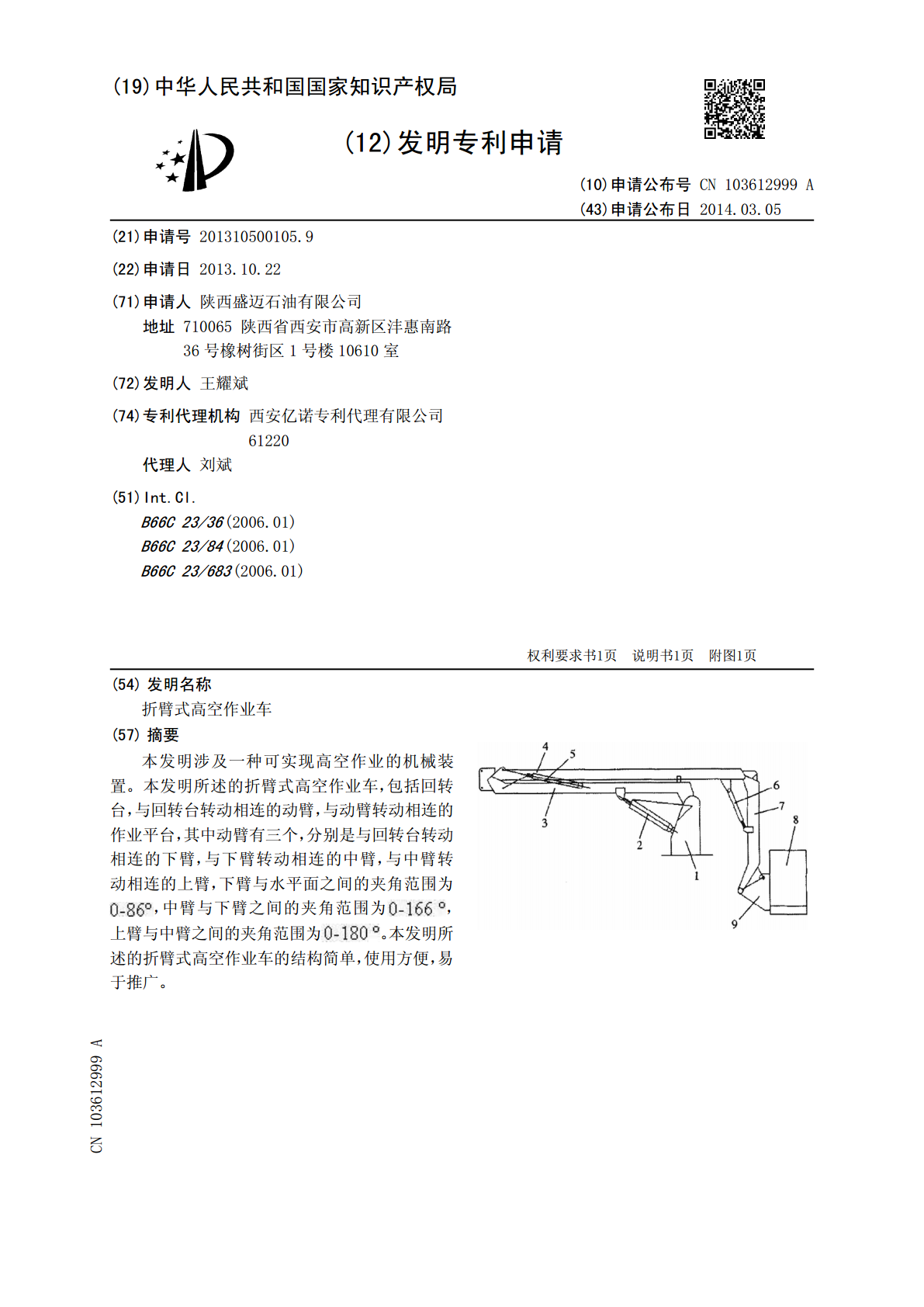
本发明涉及一种可实现高空作业的机械装置。本发明所述的折臂式高空作业车,包括回转台,与回转台转动相连的动臂,与动臂转动相连的作业平台,其中动臂有三个,分别是与回转台转动相连的下臂,与下臂转动相连的中臂,与中臂转动相连的上臂,下臂与水平面之间的夹角范围为,中臂与下臂之间的夹角范围为,上臂与中臂之间的夹角范围为。本发明所述的折臂式高空作业车的结构简单,使用方便,易于推广。
一种折臂式高空作业车的液压控制系统.pdf
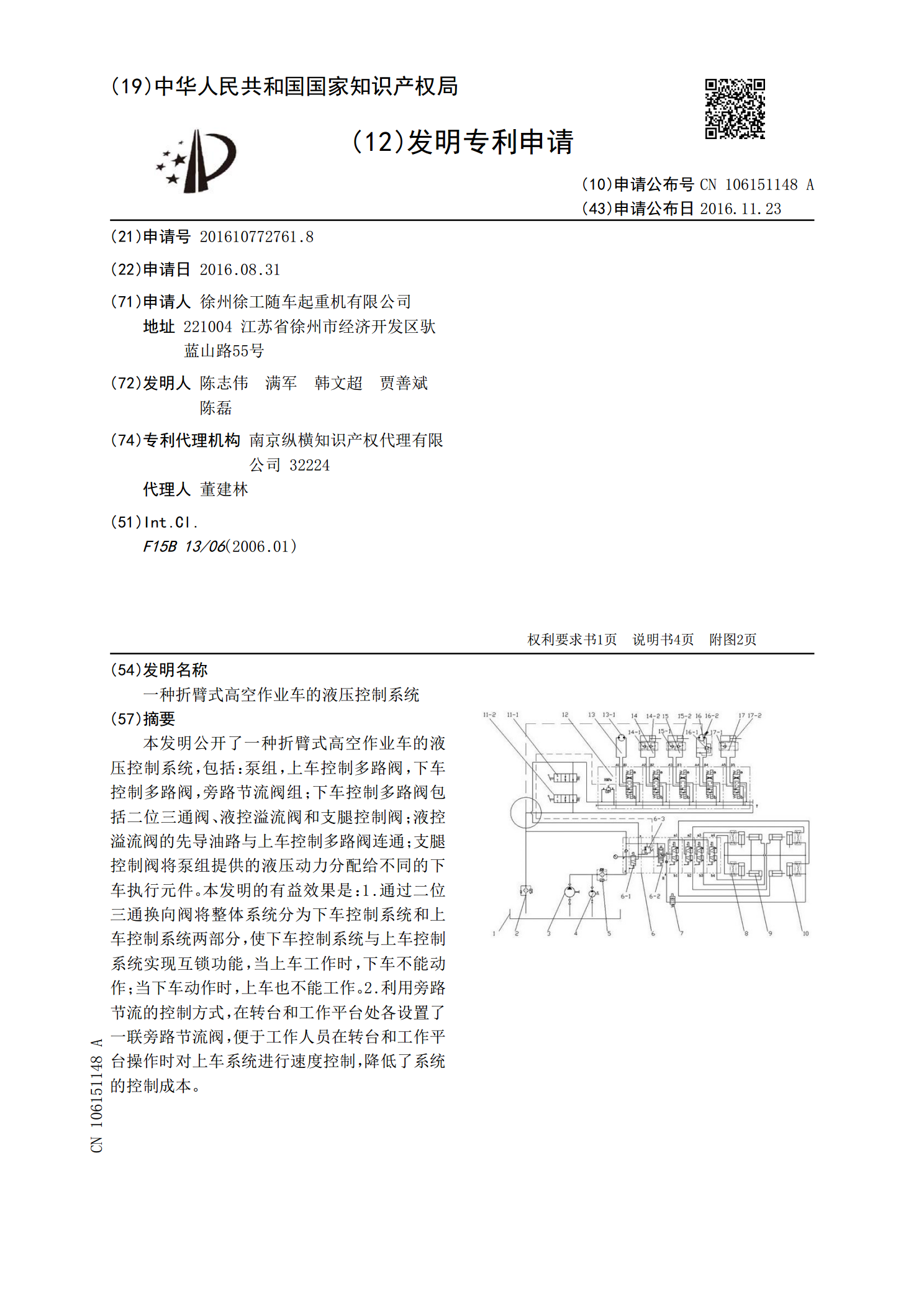
本发明公开了一种折臂式高空作业车的液压控制系统,包括:泵组,上车控制多路阀,下车控制多路阀,旁路节流阀组;下车控制多路阀包括二位三通阀、液控溢流阀和支腿控制阀;液控溢流阀的先导油路与上车控制多路阀连通;支腿控制阀将泵组提供的液压动力分配给不同的下车执行元件。本发明的有益效果是:1.通过二位三通换向阀将整体系统分为下车控制系统和上车控制系统两部分,使下车控制系统与上车控制系统实现互锁功能,当上车工作时,下车不能动作;当下车动作时,上车也不能工作。2.利用旁路节流的控制方式,在转台和工作平台处各设置了一联旁路

一种折臂式高空作业车的作业范围控制方法.pdf
本发明涉及一种折臂式高空作业车的作业范围控制方法。本发明中左侧水平支腿和右侧水平支腿分别安装在副大梁的左、右两侧,左侧水平支腿全伸检测机构和右侧水平支腿全伸检测机构均设置在副大梁上,转台通过转台旋转轴安装在副大梁上,回转方位检测机构设置转台上,回转方位检测机构用于检测下臂的回转方位,回转方位包括前方、后方、右前方、右后方、左前方和左后方共6个方位,下臂通过下臂转轴安装在转台上,下臂角度传感器设置在下臂上,下臂角度传感器用于检测下臂角度θ,上臂通过上臂转轴安装在下臂上,工作斗安装在上臂上,下臂角度传感器、回

高空作业车伸缩式作业臂.pdf
本发明公开了一种高空作业车伸缩式作业臂,包括带空腔的大臂、弹性绳一和弹性绳二,所述大臂的空腔内部设置有带空腔的二臂,所述二臂的空腔内部设置有小臂,所述大臂空腔底部与所述二臂之间设置有伸缩液压缸,所述弹性绳一的一端固定在大臂空腔底部,所述弹性绳一的另一端绕过安装在所述二臂上端的滑轮一固定在所述小臂底端,所述弹性绳二的一端固定在大臂上端,所述弹性绳二的另一端绕过安装在所述大臂空腔底部的滑轮二固定在所述小臂底端。本发明具有以下特点:设计合理,动作平稳,无刚性冲击,作业高度大,伸缩速度高,缩回后体积小,适用范围广

直臂式高空作业车施工方案.docx
直臂式高空作业车施工方案一、编制依据序号规范要求1建筑施工安全检查标准(JGJ59-2011)2建筑施工高处作业安全技术规范(JGJ80-91)3龙门架及井架物料提升机安全技术规范(JGJ88-92)4建筑施工扣件钢管脚手架安全技术规范(JGJ130-21)5建筑工程安全生产管理条例、施工准备1、清理设备上的泥土杂物,检查设备外观是否完好,有无变形、裂纹等异常损坏。2、检查转向机构有无异常。3、检查轮胎有无损坏,气压是否正常,螺栓有无松动和丢失。4、检查制动系统有无异常。5、检查车厢内和平台上是否有杂物,