
用于对机器人进行编程的方法和系统.pdf

玄静****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共35页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于对机器人进行编程的方法和系统.pdf
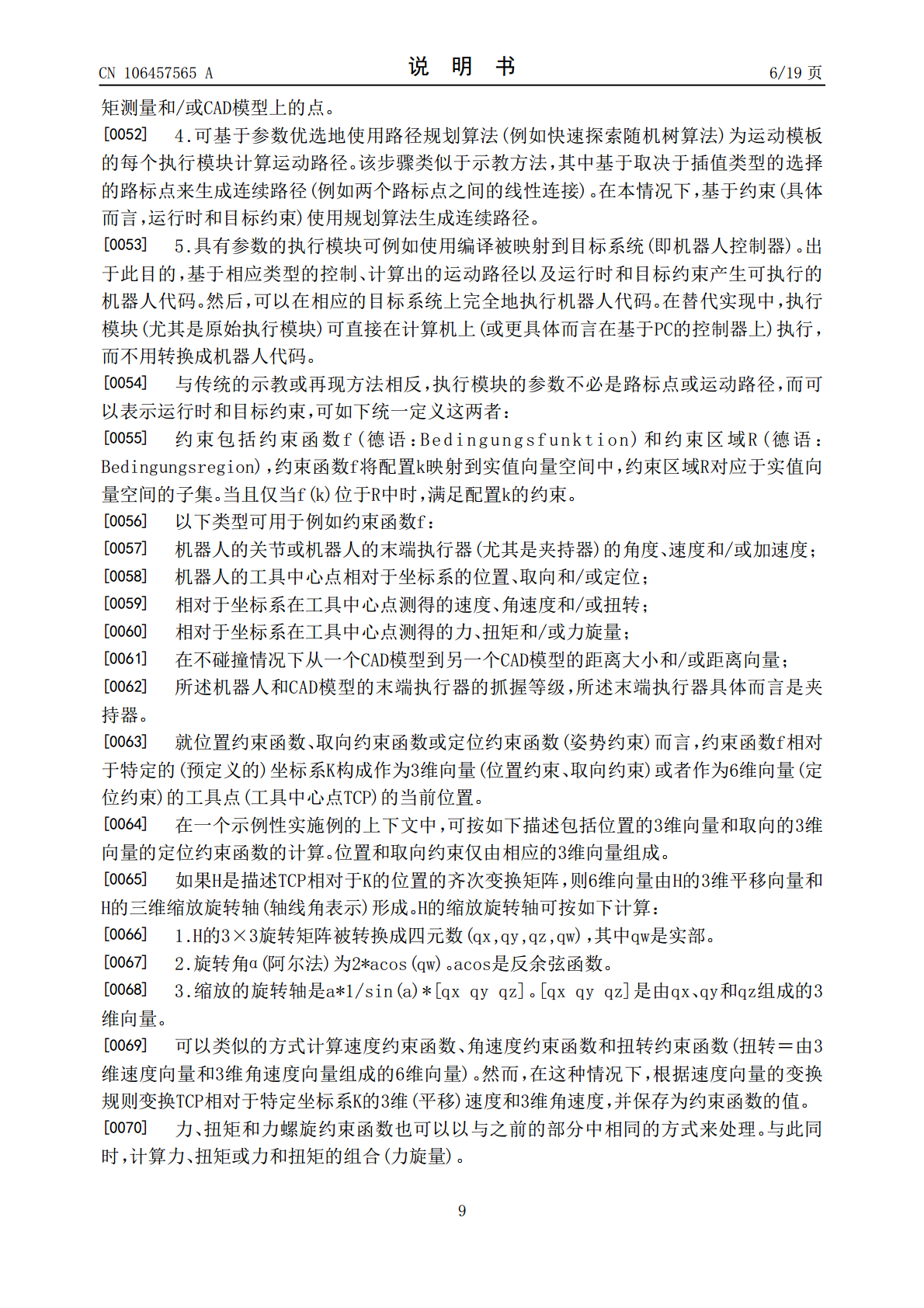
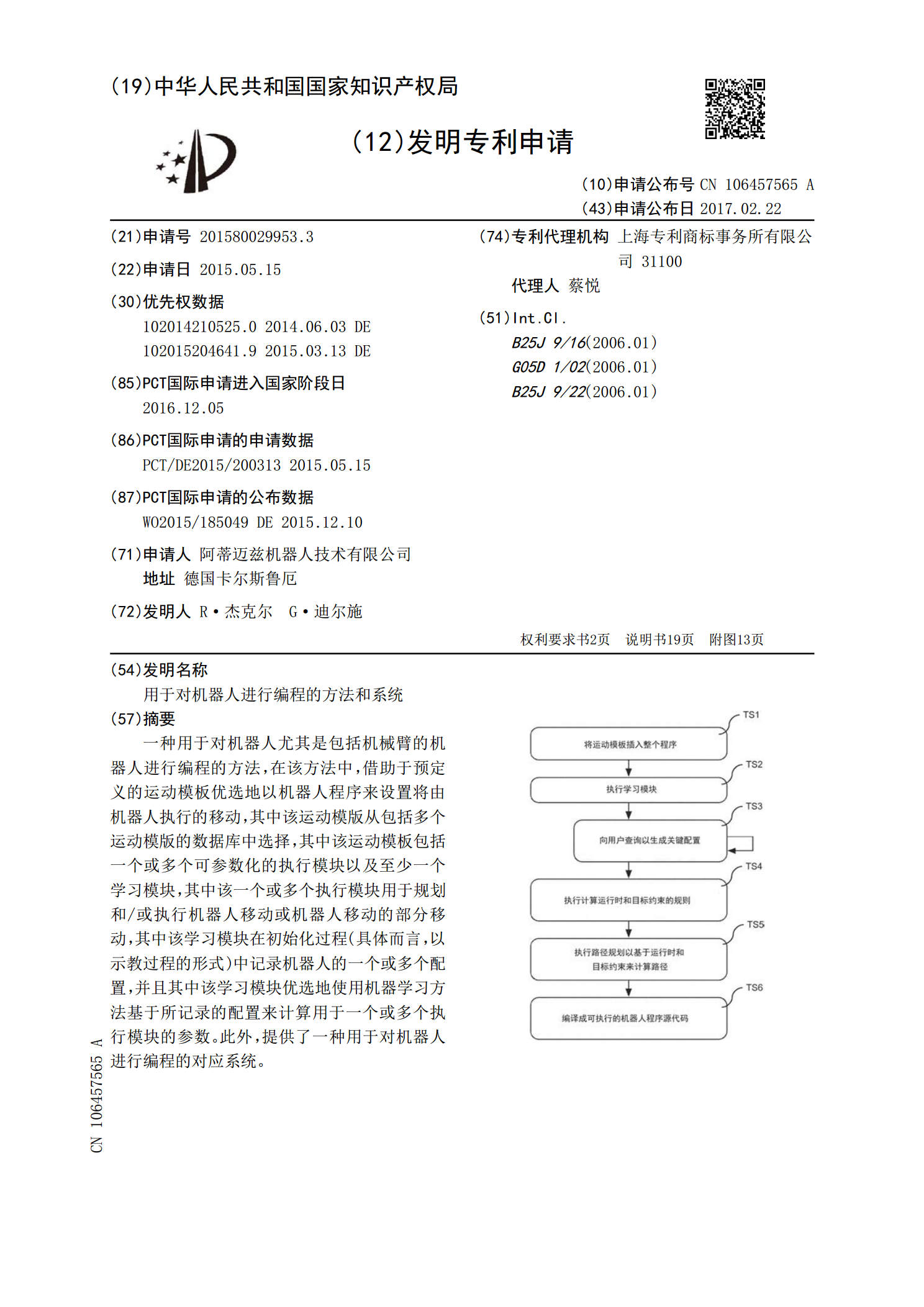
一种用于对机器人尤其是包括机械臂的机器人进行编程的方法,在该方法中,借助于预定义的运动模板优选地以机器人程序来设置将由机器人执行的移动,其中该运动模版从包括多个运动模版的数据库中选择,其中该运动模板包括一个或多个可参数化的执行模块以及至少一个学习模块,其中该一个或多个执行模块用于规划和/或执行机器人移动或机器人移动的部分移动,其中该学习模块在初始化过程(具体而言,以示教过程的形式)中记录机器人的一个或多个配置,并且其中该学习模块优选地使用机器学习方法基于所记录的配置来计算用于一个或多个执行模块的参数。此外
用于对无线网络进行编程、控制和监控的系统和方法.pdf
一种用于对无线网络进行编程、控制和监控的系统,使得无线设备(Dev)被使用并集成到汽车电子控制模块或家庭(或商业)警报/安全系统。该系统还呈现了通用控制(机器人)设备,其控制通用输入和输出功能,其中多个蜂窝手机、互联网设备可以通过蜂窝、互联网网络和其他有线/无线网络协调控制、监控、共享并交换信息。

用于对内燃发动机控制单元进行编程的方法和系统.pdf
一种用于对内燃发动机控制单元进行编程的方法包括以第一速度和第一扭矩运行测试内燃发动机,同时通过限制空气流向测试内燃发动机以模拟测试内燃发动机的高度变化或升高空气流的温度以模拟测试内燃发动机的环境温度变化来模拟测试内燃发动机的条件。该方法还包括在以第一速度和第一扭矩运行测试内燃发动机的同时并且在模拟测试内燃发动机的条件的同时测量发动机性能信息,并且通过将所测量的发动机性能信息存储在与内燃发动机控制单元相关联的存储器中来对内燃发动机控制单元进行编程。
用于以群组进行建造的系统和方法.pdf
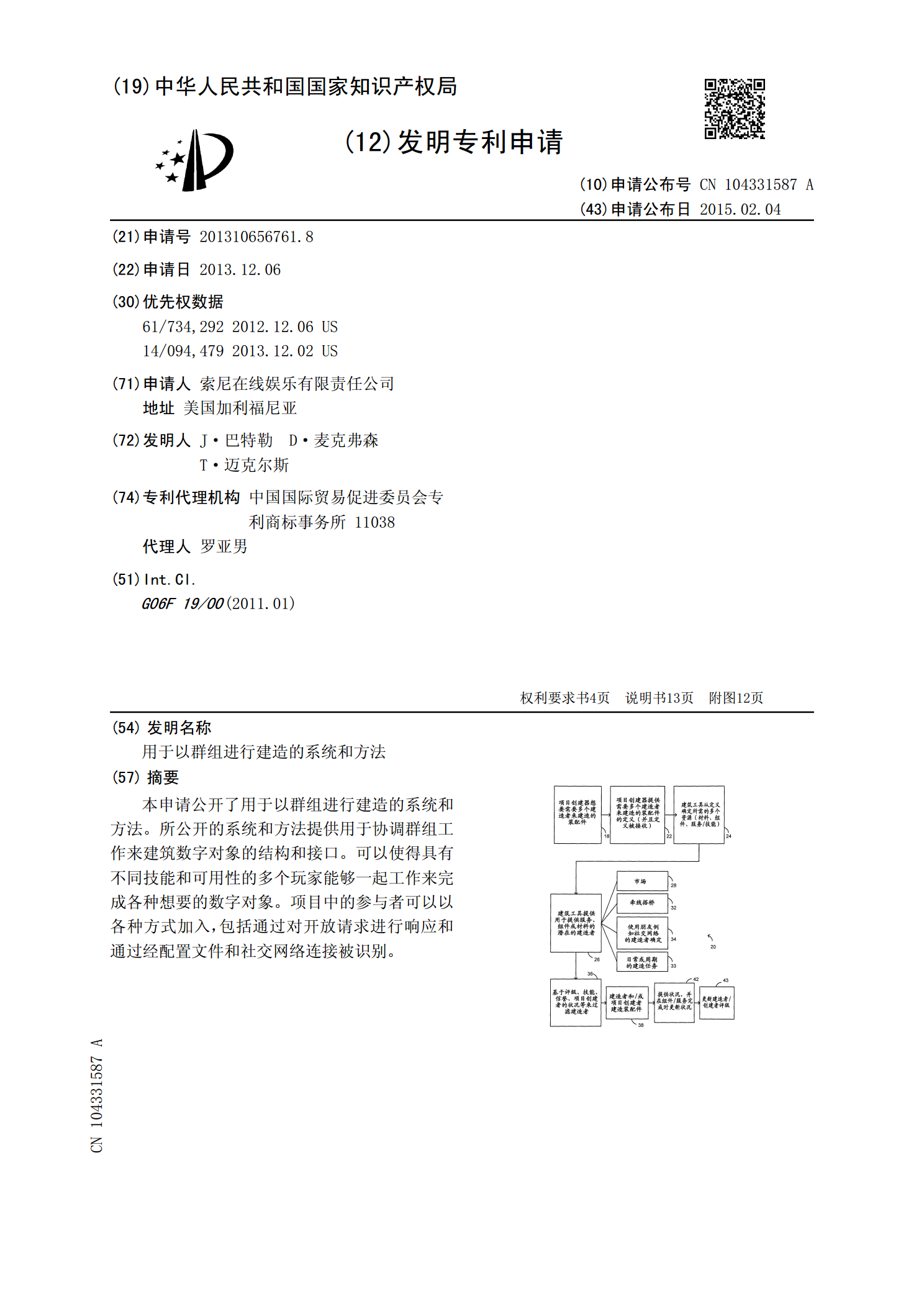
本申请公开了用于以群组进行建造的系统和方法。所公开的系统和方法提供用于协调群组工作来建筑数字对象的结构和接口。可以使得具有不同技能和可用性的多个玩家能够一起工作来完成各种想要的数字对象。项目中的参与者可以以各种方式加入,包括通过对开放请求进行响应和通过经配置文件和社交网络连接被识别。

机器人的控制系统和编程方法.pdf
机器人的控制系统和编程方法随着科技的不断进步,机器人已经越来越多地进入了我们的日常生活中。无论是在工业、医疗还是家庭等方面,机器人都得到了广泛的应用。而机器人的控制系统和编程方法,是机器人能够完成各种任务的关键之一。一、机器人控制系统机器人控制系统包括硬件和软件两个方面的内容,其中硬件主要包括机器人的感知器、执行器和控制器等,而软件则主要是机器人的控制程序。下面将分别来介绍机器人控制系统的这两个方面。1.机器人硬件机器人的感知系统主要有如下几种:①视觉系统:用于识别、追踪、定位和测量机器人工作环境中的物体