
用于相机校准的方法和装置.pdf

猫巷****傲柏


1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于相机校准的方法和装置.pdf
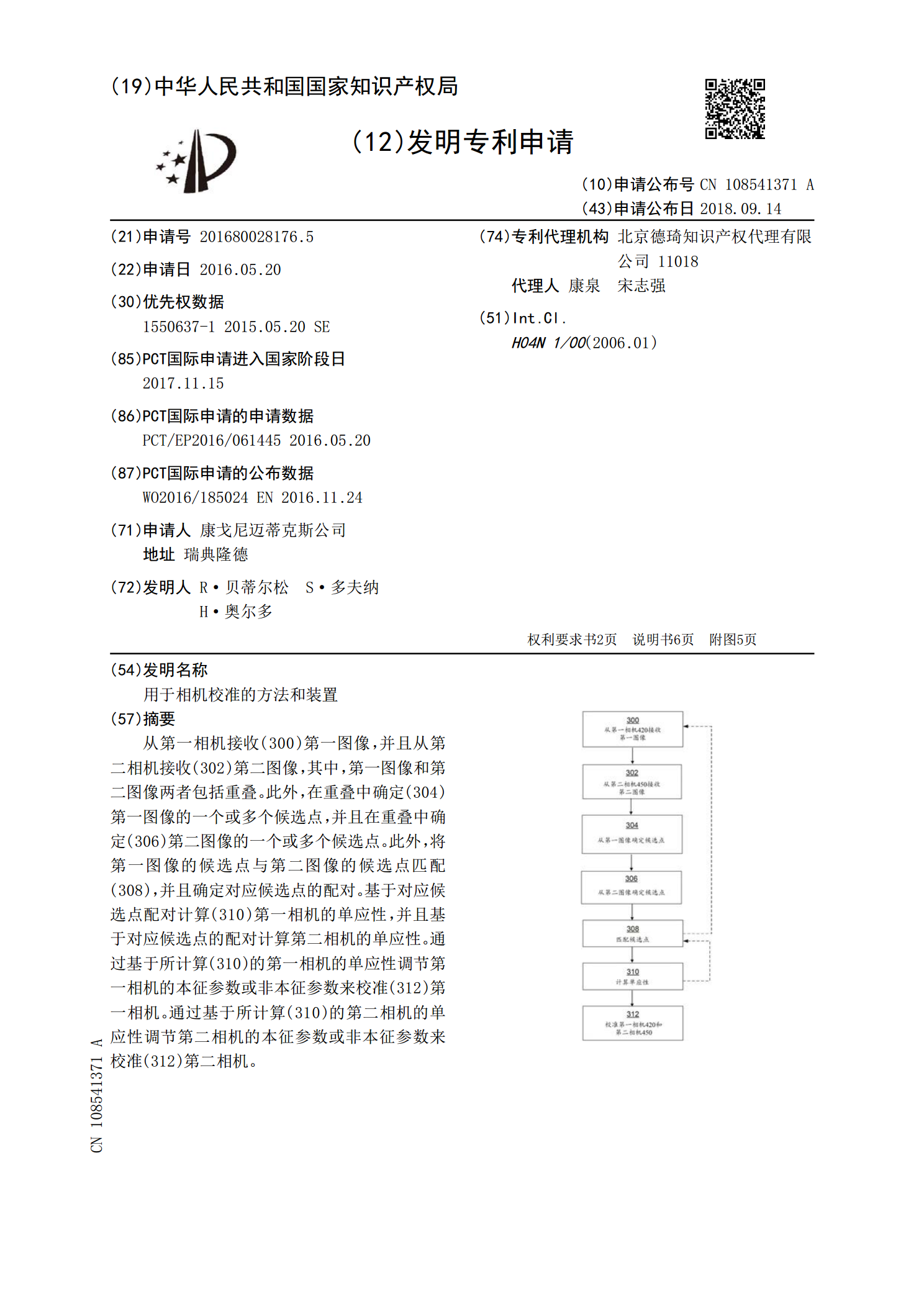
从第一相机接收(300)第一图像,并且从第二相机接收(302)第二图像,其中,第一图像和第二图像两者包括重叠。此外,在重叠中确定(304)第一图像的一个或多个候选点,并且在重叠中确定(306)第二图像的一个或多个候选点。此外,将第一图像的候选点与第二图像的候选点匹配(308),并且确定对应候选点的配对。基于对应候选点配对计算(310)第一相机的单应性,并且基于对应候选点的配对计算第二相机的单应性。通过基于所计算(310)的第一相机的单应性调节第一相机的本征参数或非本征参数来校准(312)第一相机。通过基于

一种用于VR测试的双目相机光轴校准方法和装置.pdf
本发明涉及VR测试技术领域,具体涉及一种用于VR测试的双目相机光轴校准方法和装置,包括底座、激光平台、第一调节平台、第二调节平台和第三调节平台,所述激光平台、第一调节平台、第二调节平台和第三调节平台呈排列状设置于底座上,所述激光平台包括第二支撑架和激光模块,所述激光模块固定设置于底座上并位于第二支撑架旁侧,所述第一调节平台包括第一角位调节模块和相机调节模块,本发明的通过激光平台、第一调节平台、第二调节平台和第三调节平台,即可达到调节测试光轴间距、相机光轴调整和VR双目近眼显示模块的IPD的效果,安全高效,

用于校准薄膜软管的校准装置和方法.pdf
本发明涉及用于校准薄膜软管的校准装置和方法。能够弹性变形的元件(704)被如此紧固在套管(703)处,使得流体、尤其是气体、优选空气能够经由流体连接件被如此引入或者引出,使得在给定的温度时,在由套管和能够变形的元件包围的空间(708)中出现特定的压力P1和/或特定的体积V1。环形的构件体(706)和(707)布置在所述空间(708)中,其中,能够弹性变形的元件(704)的区域分别由环形的构件体(706)、(707)的表面部分承载。能够弹性变形的元件(704)的、由环形的构件体承载的区域位于校准装置的入口区
用于相机校准的方法、系统和计算机可读介质.pdf
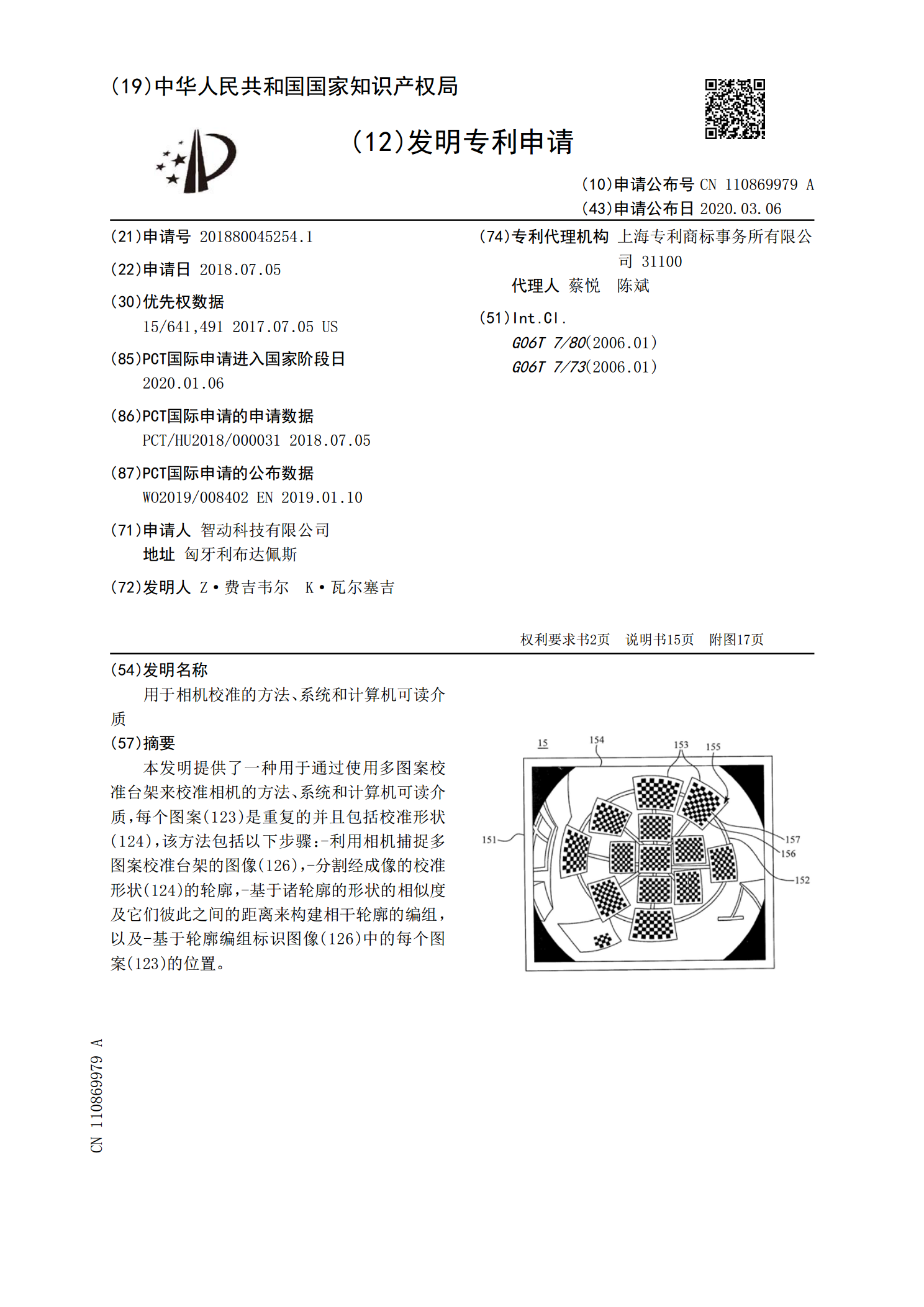
本发明提供了一种用于通过使用多图案校准台架来校准相机的方法、系统和计算机可读介质,每个图案(123)是重复的并且包括校准形状(124),该方法包括以下步骤:‑利用相机捕捉多图案校准台架的图像(126),‑分割经成像的校准形状(124)的轮廓,‑基于诸轮廓的形状的相似度及它们彼此之间的距离来构建相干轮廓的编组,以及‑基于轮廓编组标识图像(126)中的每个图案(123)的位置。

用于校准和使用相机检测样本中分析物的方法和系统.pdf
公开了一种用于校准和使用相机(116)的方法、计算机程序和系统(110,112,114),所述相机(116)用于检测样本(131)中的分析物。用于校准用来检测样本(131)中的分析物的相机(116)的校准方法包括:a.提供颜色坐标系集合,所述颜色坐标系集合包括被配置用于描述物体的颜色的多个不同的颜色坐标系;b.提供具有已知浓度的分析物的测试样本集合(122);c.将测试样本(124)施加到测试元件集合(126),每个测试元件(128)具有至少一个测试场(130),所述测试场(130)包括至少一种测试化学品