
一种电动可伸缩悬挂式G型臂及其工作方法.pdf

小长****6淑

1/10
2/10
3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种电动可伸缩悬挂式G型臂及其工作方法.pdf
本发明提供一种电动可伸缩悬挂式G型臂,包括底座、连接在底座上端的矩形伸缩杆、连接在矩形伸缩杆上端的整机旋转机构、连接在整机旋转机构上的连接块和连接在连接块上的L形臂以及滑动连接在L形臂内侧壁上的可收缩G型臂,所述可收缩G型臂包括大臂,所述大臂的外弧面上开设有用于小臂滑动的第一弧形凹槽,且小臂的外弧面上开设有第二弧形凹槽。本发明克服了现有技术的不足,设计合理,结构紧凑,解决了应用于临床的C臂或者G臂运动自由度少,工作空间小,整体移动不便,立体成像效率低的问题,通过采用了多种结构,实现了C臂与G臂的转换,结合
一种电动可伸缩悬挂式G型臂.pdf
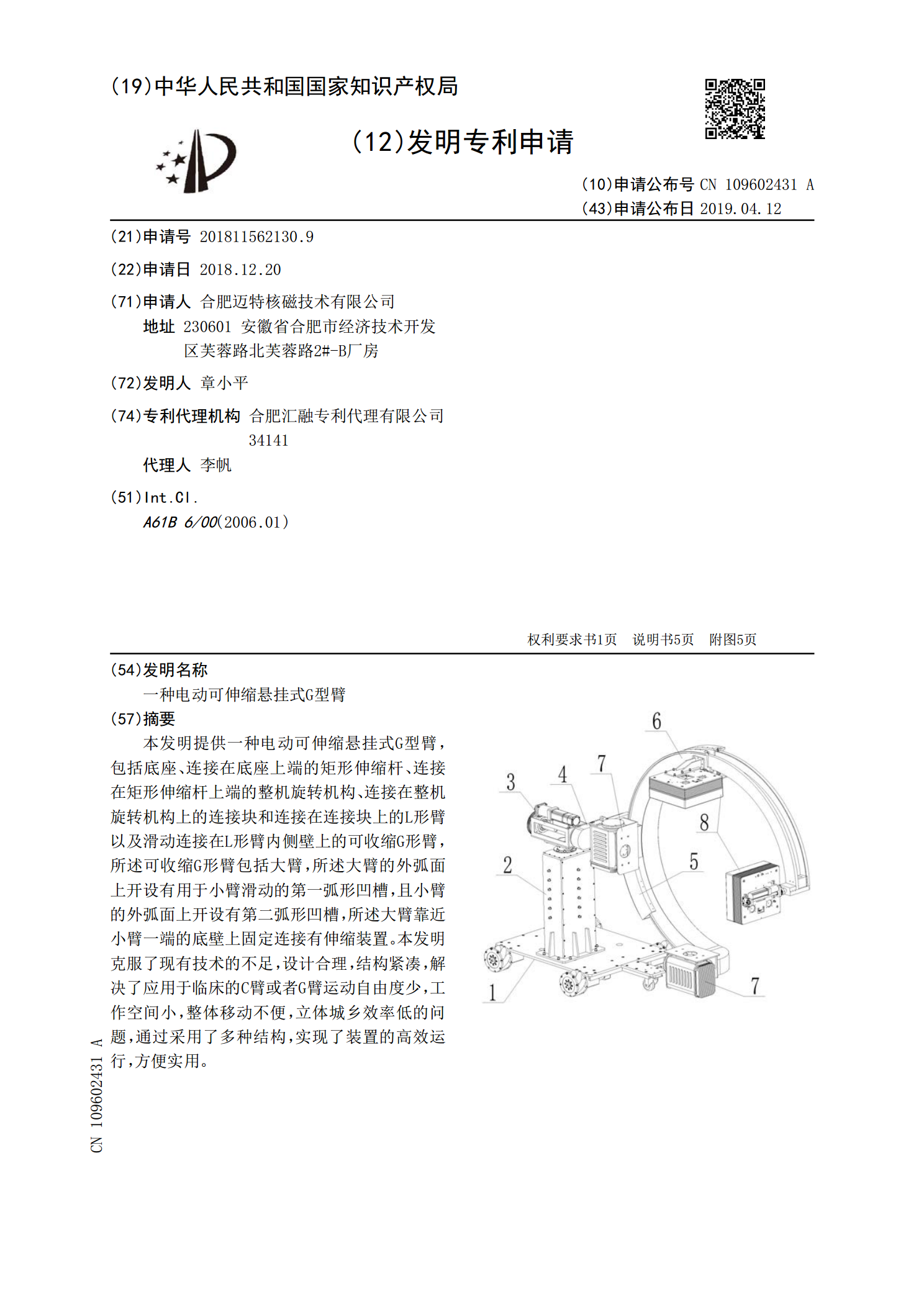
本发明提供一种电动可伸缩悬挂式G型臂,包括底座、连接在底座上端的矩形伸缩杆、连接在矩形伸缩杆上端的整机旋转机构、连接在整机旋转机构上的连接块和连接在连接块上的L形臂以及滑动连接在L形臂内侧壁上的可收缩G形臂,所述可收缩G形臂包括大臂,所述大臂的外弧面上开设有用于小臂滑动的第一弧形凹槽,且小臂的外弧面上开设有第二弧形凹槽,所述大臂靠近小臂一端的底壁上固定连接有伸缩装置。本发明克服了现有技术的不足,设计合理,结构紧凑,解决了应用于临床的C臂或者G臂运动自由度少,工作空间小,整体移动不便,立体城乡效率低的问题,
一种G型臂伸缩机构.pdf
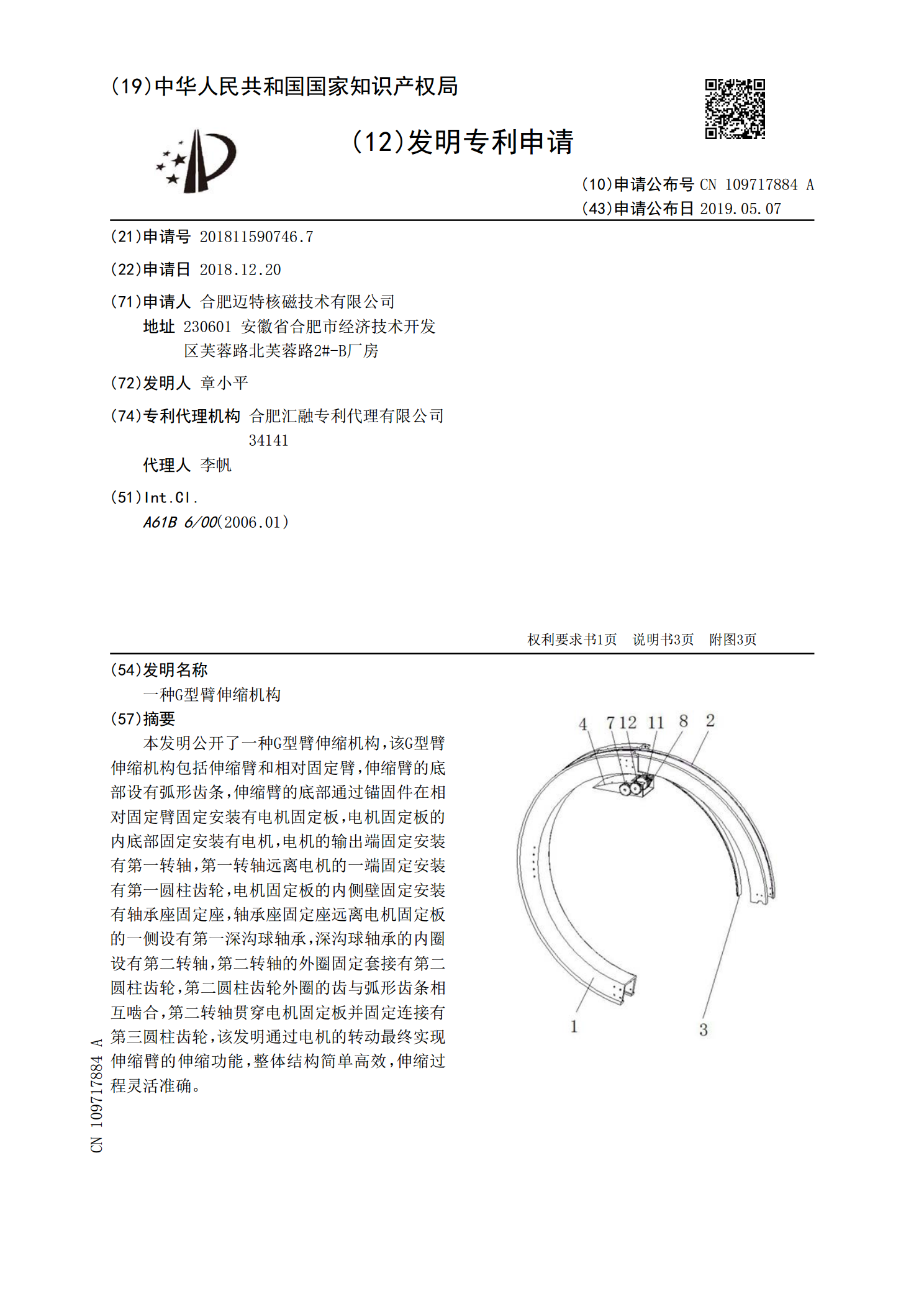
本发明公开了一种G型臂伸缩机构,该G型臂伸缩机构包括伸缩臂和相对固定臂,伸缩臂的底部设有弧形齿条,伸缩臂的底部通过锚固件在相对固定臂固定安装有电机固定板,电机固定板的内底部固定安装有电机,电机的输出端固定安装有第一转轴,第一转轴远离电机的一端固定安装有第一圆柱齿轮,电机固定板的内侧壁固定安装有轴承座固定座,轴承座固定座远离电机固定板的一侧设有第一深沟球轴承,深沟球轴承的内圈设有第二转轴,第二转轴的外圈固定套接有第二圆柱齿轮,第二圆柱齿轮外圈的齿与弧形齿条相互啮合,第二转轴贯穿电机固定板并固定连接有第三圆柱
一种可伸缩顶棚式垃圾池及其工作方法.pdf
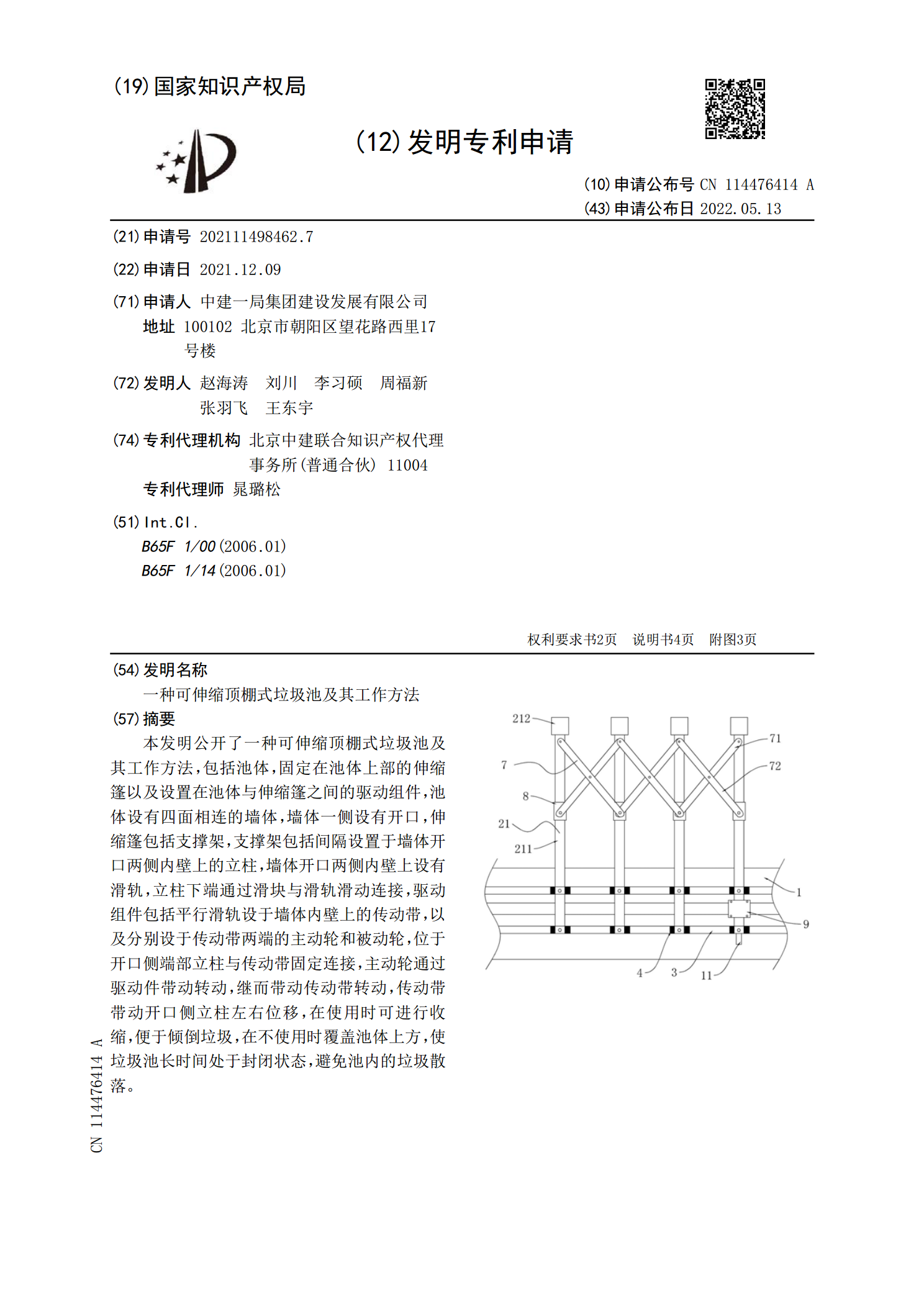
本发明公开了一种可伸缩顶棚式垃圾池及其工作方法,包括池体,固定在池体上部的伸缩篷以及设置在池体与伸缩篷之间的驱动组件,池体设有四面相连的墙体,墙体一侧设有开口,伸缩篷包括支撑架,支撑架包括间隔设置于墙体开口两侧内壁上的立柱,墙体开口两侧内壁上设有滑轨,立柱下端通过滑块与滑轨滑动连接,驱动组件包括平行滑轨设于墙体内壁上的传动带,以及分别设于传动带两端的主动轮和被动轮,位于开口侧端部立柱与传动带固定连接,主动轮通过驱动件带动转动,继而带动传动带转动,传动带带动开口侧立柱左右位移,在使用时可进行收缩,便于倾倒垃

伸缩臂起重机及其单缸插销式伸缩臂.pdf
本发明公开了一种单缸插销式伸缩臂,包括至少两节臂体、同时锁定相邻两节臂体的第一缸销和第二缸销,以及连接第一缸销和第二缸销的缸销同步装置;该缸销同步装置包括连杆、均连杆刚性连接的第一齿轮和第二齿轮;第一齿轮与第一缸销啮合,第二齿轮与第二缸销啮合;臂体的内部设有驱动臂体伸出的伸缩油缸,第一缸销和第二缸销均安装于伸缩油缸的缸头体上;缸销同步装置还包括驱动油缸,驱动油缸的固定端与缸头体固定连接,驱动油缸的自由端与连杆传动连接。该伸缩臂能显著提高缸销的同步性,并同时提高伸缩臂工作时的可靠性。本发明还提供一种包括上述