
一种G型臂伸缩机构.pdf

一只****懿呀

1/8
2/8

3/8

4/8

5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
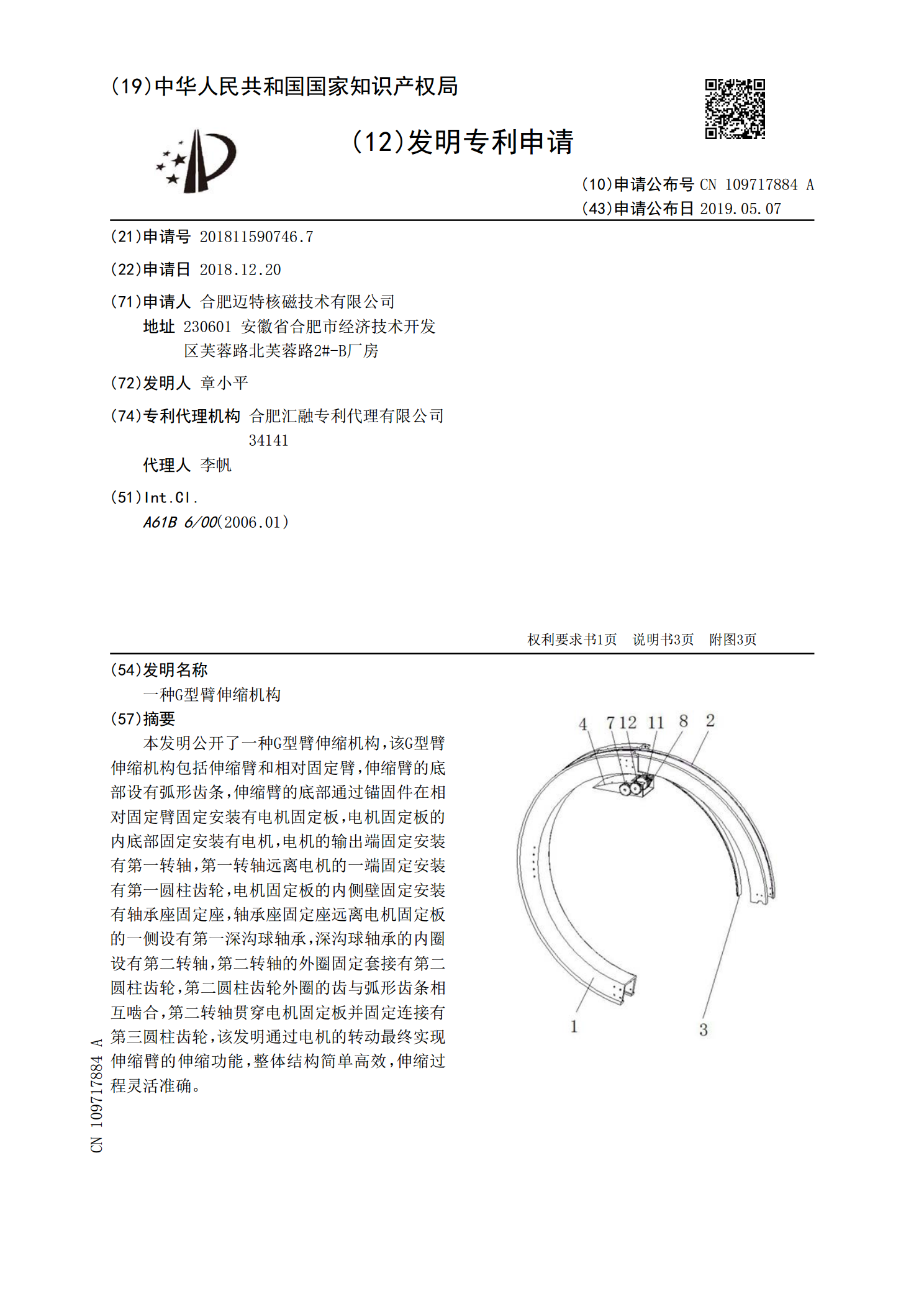
一种G型臂伸缩机构.pdf
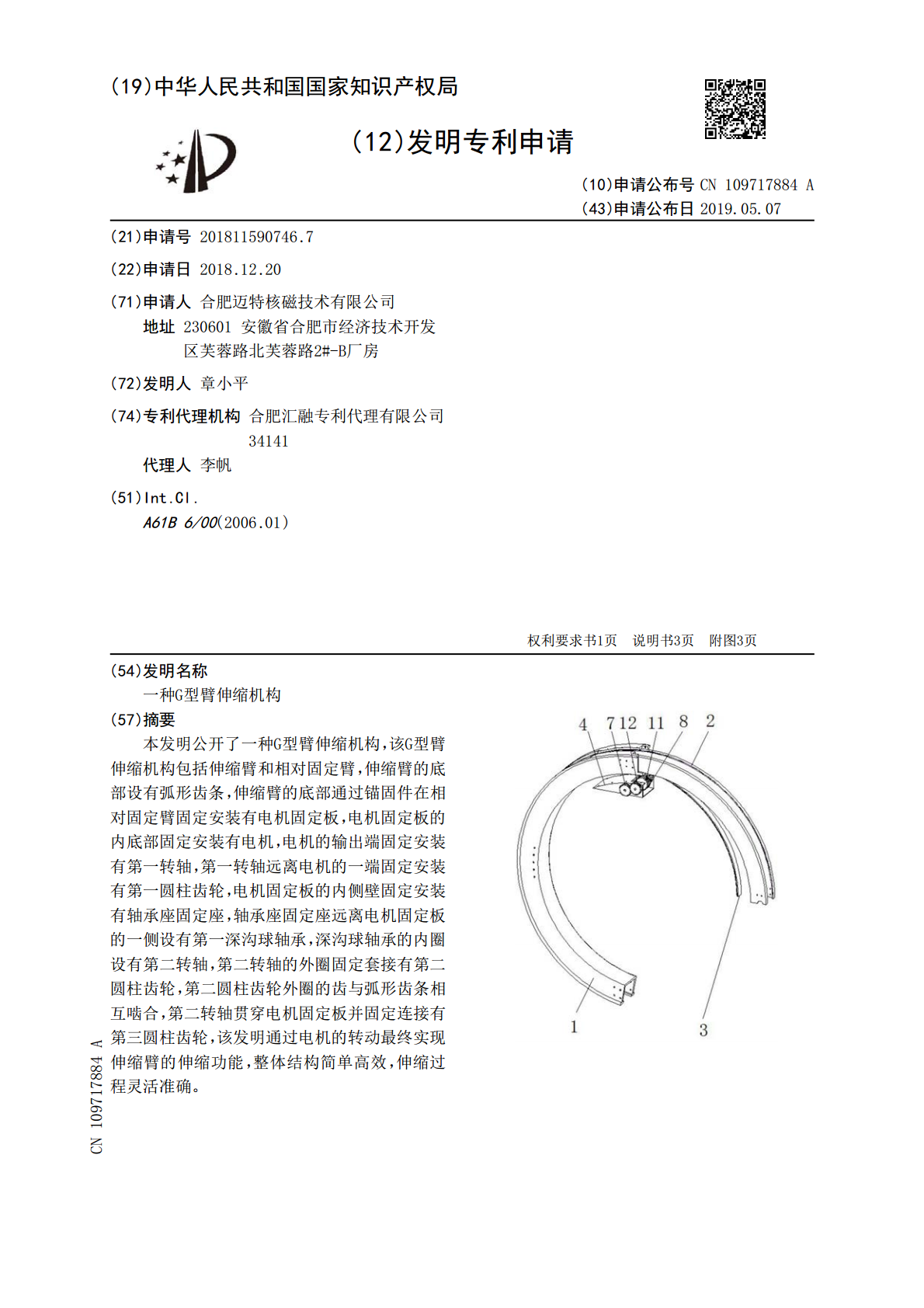
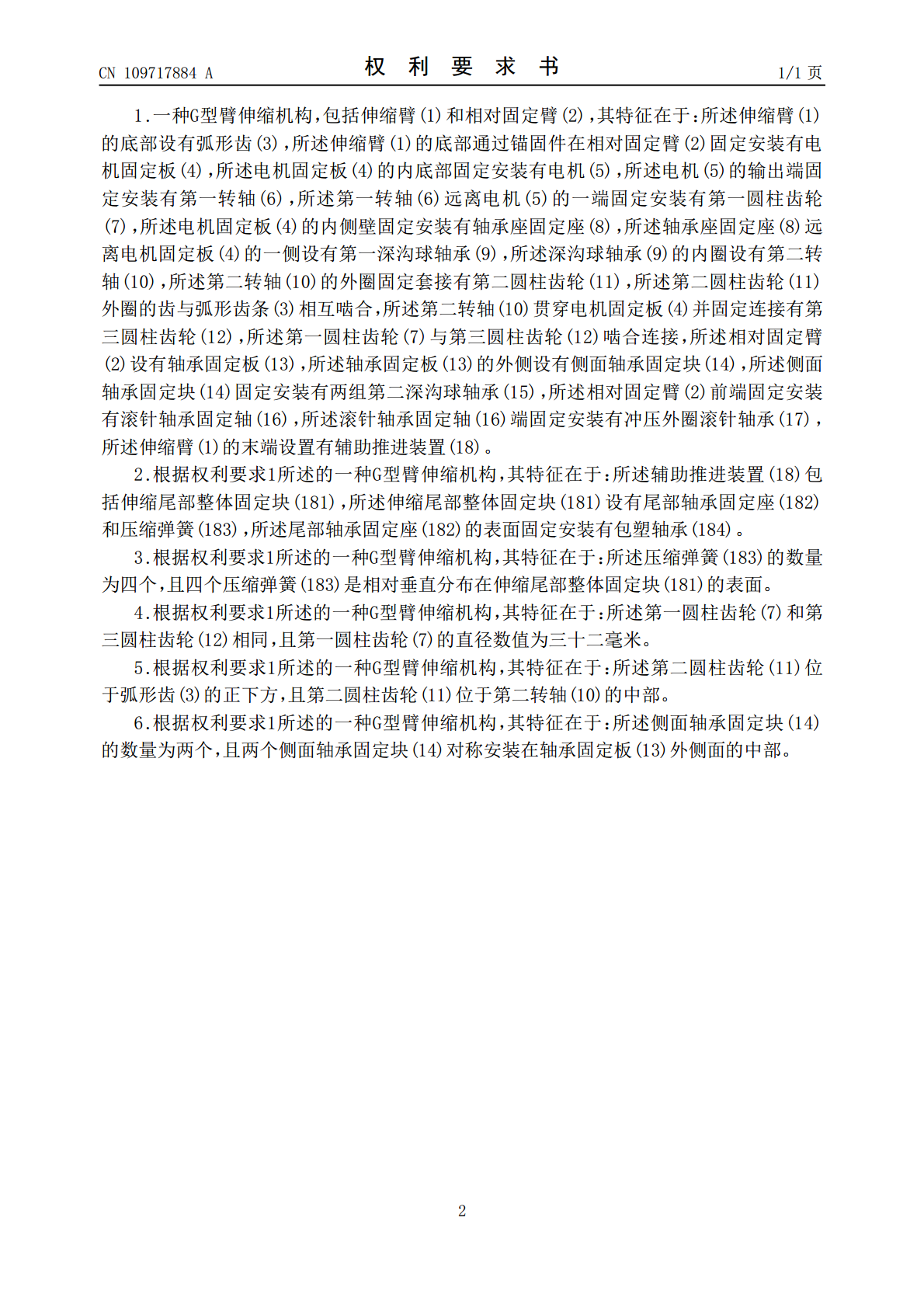
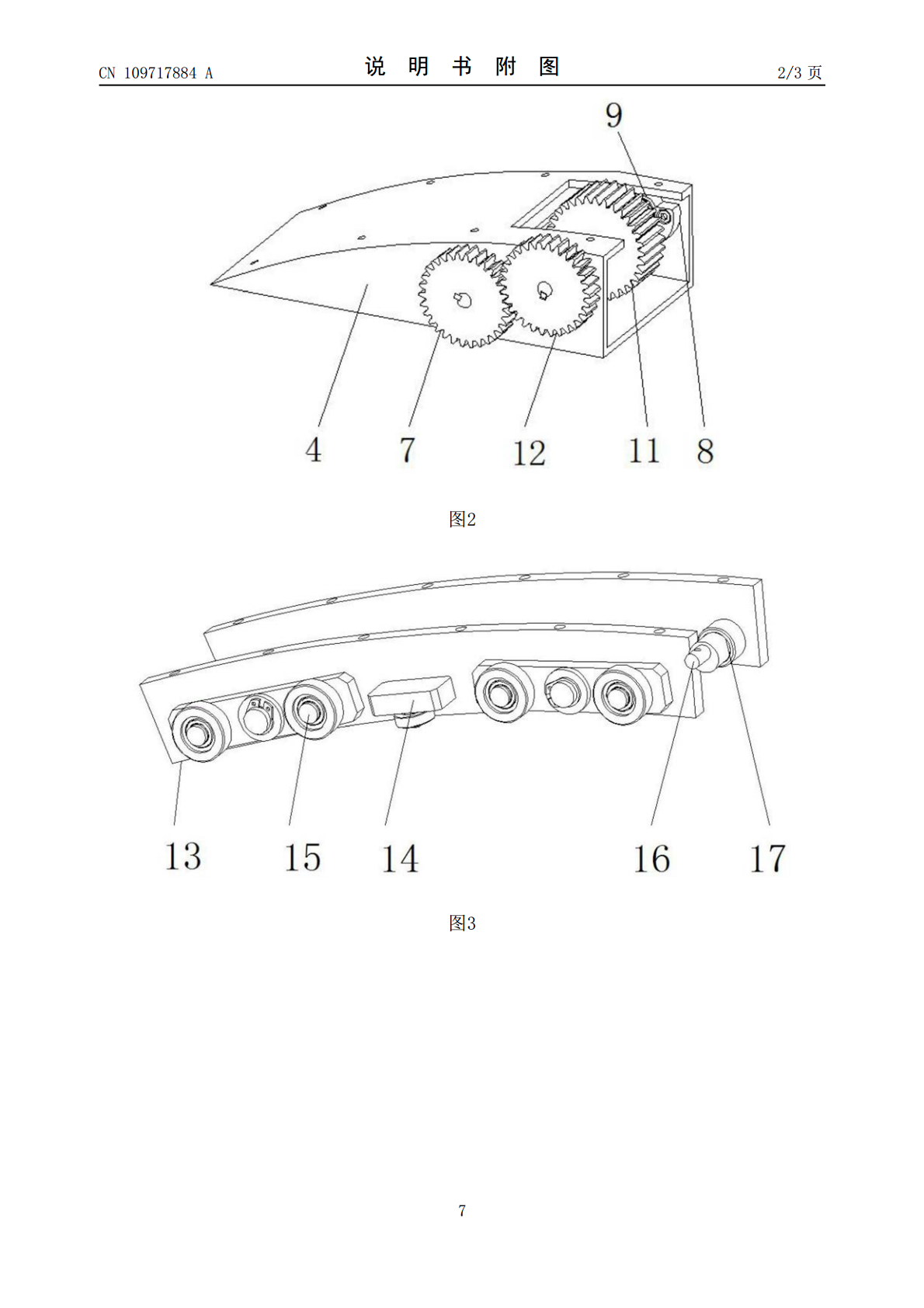
本发明公开了一种G型臂伸缩机构,该G型臂伸缩机构包括伸缩臂和相对固定臂,伸缩臂的底部设有弧形齿条,伸缩臂的底部通过锚固件在相对固定臂固定安装有电机固定板,电机固定板的内底部固定安装有电机,电机的输出端固定安装有第一转轴,第一转轴远离电机的一端固定安装有第一圆柱齿轮,电机固定板的内侧壁固定安装有轴承座固定座,轴承座固定座远离电机固定板的一侧设有第一深沟球轴承,深沟球轴承的内圈设有第二转轴,第二转轴的外圈固定套接有第二圆柱齿轮,第二圆柱齿轮外圈的齿与弧形齿条相互啮合,第二转轴贯穿电机固定板并固定连接有第三圆柱
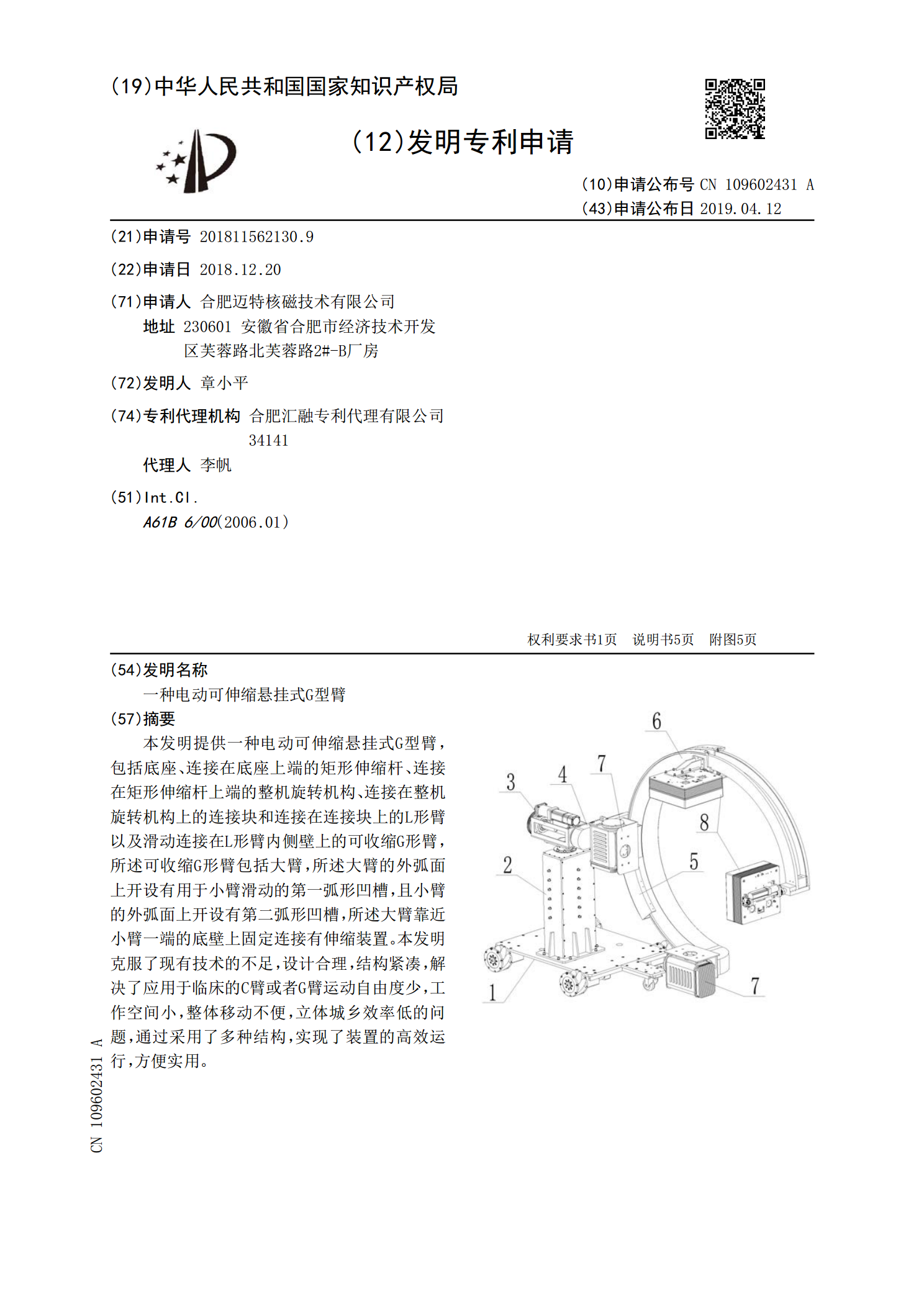
一种电动可伸缩悬挂式G型臂.pdf
本发明提供一种电动可伸缩悬挂式G型臂,包括底座、连接在底座上端的矩形伸缩杆、连接在矩形伸缩杆上端的整机旋转机构、连接在整机旋转机构上的连接块和连接在连接块上的L形臂以及滑动连接在L形臂内侧壁上的可收缩G形臂,所述可收缩G形臂包括大臂,所述大臂的外弧面上开设有用于小臂滑动的第一弧形凹槽,且小臂的外弧面上开设有第二弧形凹槽,所述大臂靠近小臂一端的底壁上固定连接有伸缩装置。本发明克服了现有技术的不足,设计合理,结构紧凑,解决了应用于临床的C臂或者G臂运动自由度少,工作空间小,整体移动不便,立体城乡效率低的问题,
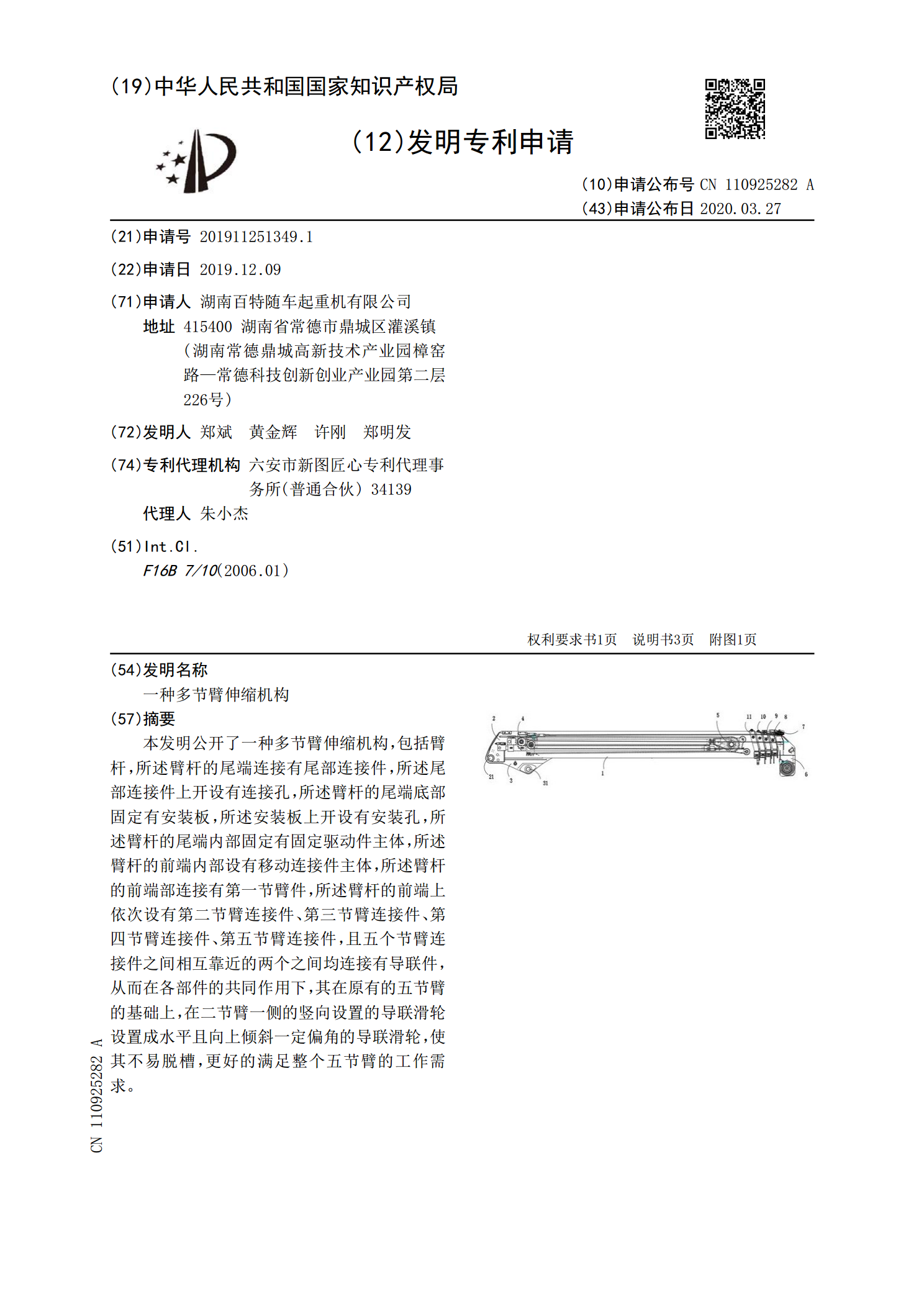
一种多节臂伸缩机构.pdf
本发明公开了一种多节臂伸缩机构,包括臂杆,所述臂杆的尾端连接有尾部连接件,所述尾部连接件上开设有连接孔,所述臂杆的尾端底部固定有安装板,所述安装板上开设有安装孔,所述臂杆的尾端内部固定有固定驱动件主体,所述臂杆的前端内部设有移动连接件主体,所述臂杆的前端部连接有第一节臂件,所述臂杆的前端上依次设有第二节臂连接件、第三节臂连接件、第四节臂连接件、第五节臂连接件,且五个节臂连接件之间相互靠近的两个之间均连接有导联件,从而在各部件的共同作用下,其在原有的五节臂的基础上,在二节臂一侧的竖向设置的导联滑轮设置成水平

一种新型六节箱型伸缩臂机构研究.docx
一种新型六节箱型伸缩臂机构研究随着现代工业的快速发展以及物流业的不断壮大,机械设备的需求不断增长。伸缩臂机构作为一种重要的机械系统,在物料搬运、装卸等领域中具有广泛应用。为了更好地满足市场需求,本文研究了一种新型六节箱型伸缩臂机构。1.机构设计该机构由一根六节伸缩臂组成,每一节之间通过轴承连接,并且形状为框架结构。每一节之间的伸缩控制采用液压系统,可以实现精准的伸缩调节。整个机构由主支撑柱、转动支撑柱和活动臂底座构成,通过转动支撑柱的旋转运动、活动臂底座的平移运动实现机构伸缩。2.机构原理该机构在实际工作
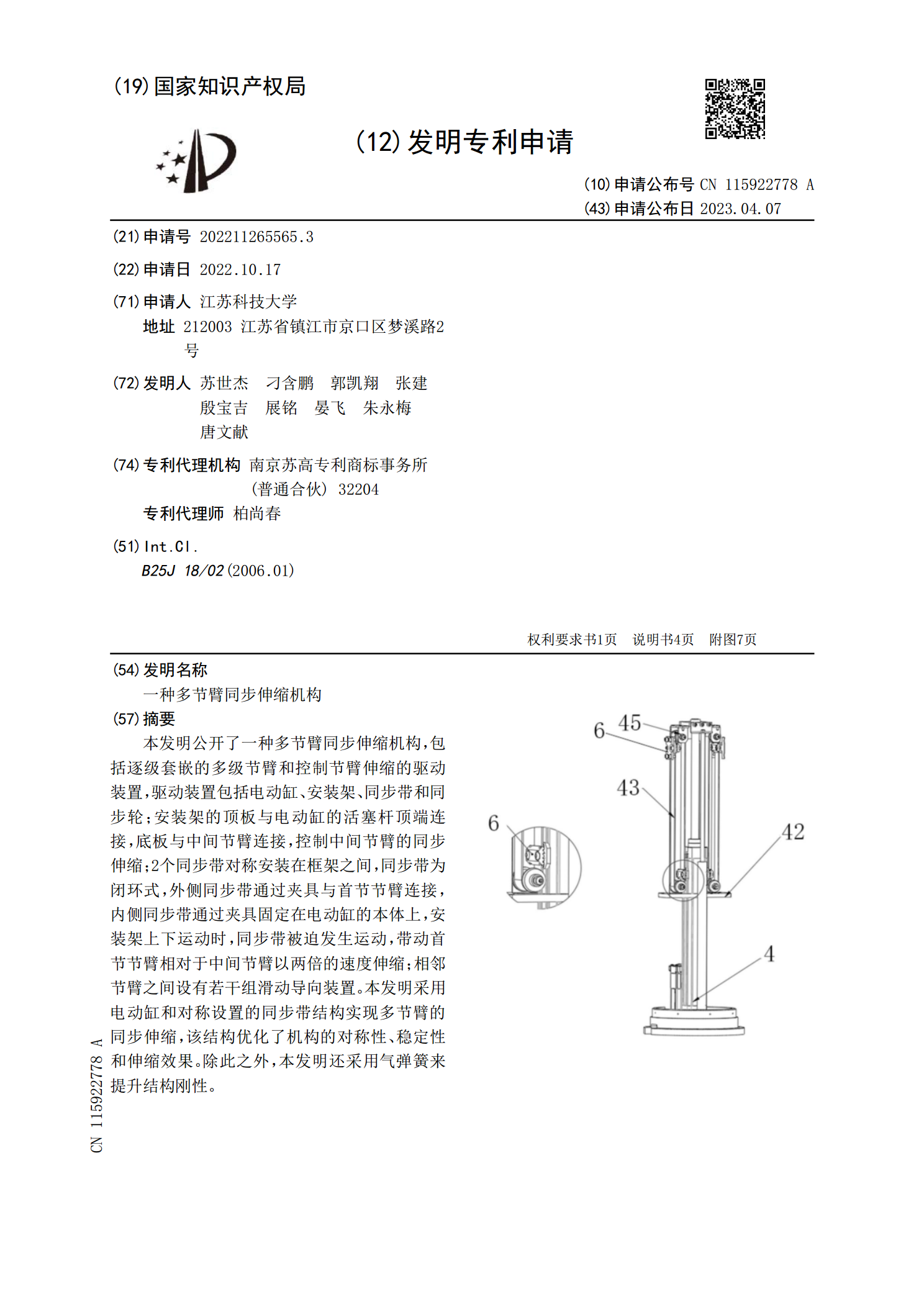
一种多节臂同步伸缩机构.pdf
本发明公开了一种多节臂同步伸缩机构,包括逐级套嵌的多级节臂和控制节臂伸缩的驱动装置,驱动装置包括电动缸、安装架、同步带和同步轮;安装架的顶板与电动缸的活塞杆顶端连接,底板与中间节臂连接,控制中间节臂的同步伸缩;2个同步带对称安装在框架之间,同步带为闭环式,外侧同步带通过夹具与首节节臂连接,内侧同步带通过夹具固定在电动缸的本体上,安装架上下运动时,同步带被迫发生运动,带动首节节臂相对于中间节臂以两倍的速度伸缩;相邻节臂之间设有若干组滑动导向装置。本发明采用电动缸和对称设置的同步带结构实现多节臂的同步伸缩,该